| 基于PI双闭环解耦控制的三相SVPWM电压型逆变器(1) | 您所在的位置:网站首页 › 逆变器参数设置 › 基于PI双闭环解耦控制的三相SVPWM电压型逆变器(1) |
基于PI双闭环解耦控制的三相SVPWM电压型逆变器(1)
|
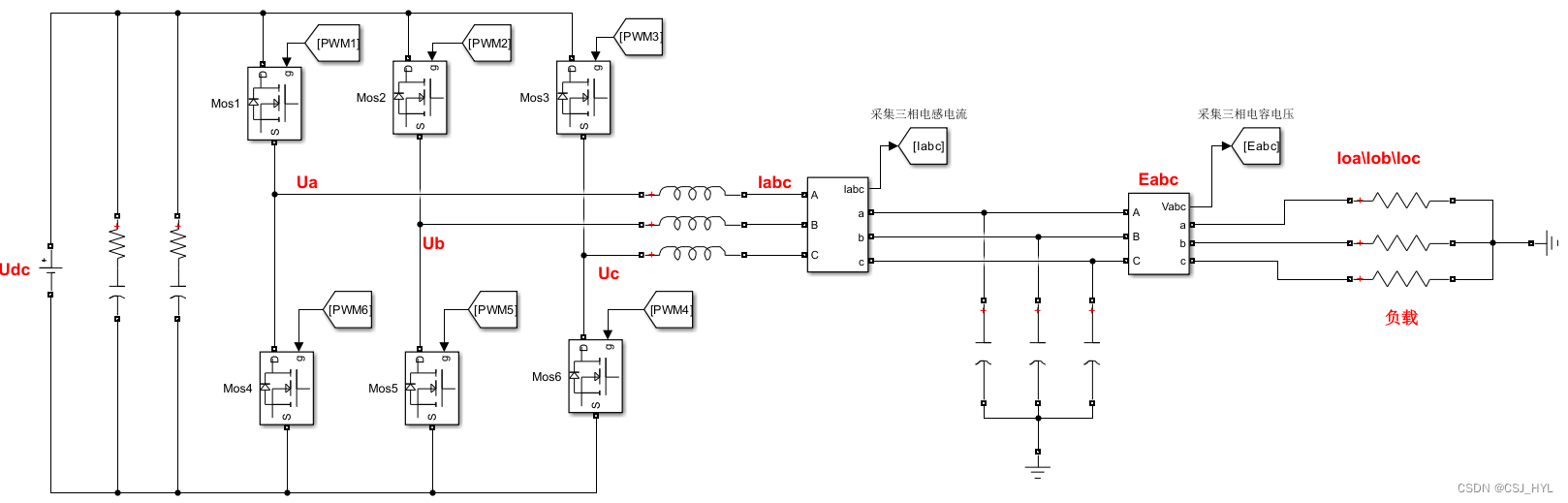
最近在研究三相逆变,写篇博客分享一下。 1. 电路拓扑如下图所示,为三相电压型逆变电路的主电路拓扑。主电路主要由四部分组成,直流电源、6个开关管(互补导通)、三个滤波电感和滤波电容组成的滤波电路、负载,实际上是三个星接的电阻。
其中Udc表示直流侧电压,靠近直流侧的两个电容为输入滤波电容,Ua、Ub、Uc表示为每个逆变桥臂的中点到直流测电压负极,是逆变桥臂输出的每相脉冲电压,Ia、Ib、Ic表示为三个流经滤波电感的相电流,Ea、Eb、Ec表示为电容电压,也就是负载电压。Ioa、Iob、Ioc表示为流经负载的电流。 2. 逆变器的数学模型需要通过建立逆变器的数学模型来研究该电路,为下一步设计控制器打好基础。分析这种电路,往往从电感、电容入手,根据KVL、KCL列写电路方程,进而得到电路的数学模型。 2.1 逆变器在三相静止坐标系下的数学模型根据KVL定理,可列出副边abc三相的电压回路方程,公式(2.1): 式中,R为相应回路电感的等效阻值,Ua、Uc、Uc分别为a、b、c三相的相电压,Ia、Ib、Ic为流经电感的电流。 根据KCL定理,可以得出副边电流的回路方程,公式(2.2)
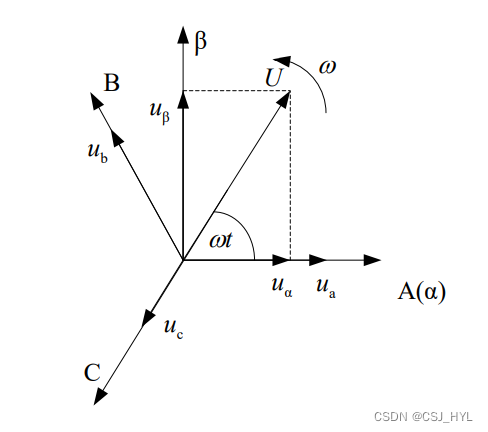
通过公式(2.1)、公式(2.2),我们就得到了该逆变器在三相静止坐标系下的数学模型。三相静止坐标系abc下的数学模型虽然能够很好地买描述电压和电流之间的关系,但是模型中有多个输入、多个输出,表达式和变量比较多,难以设计相应的控制器。 2.2 逆变器在αβ轴坐标系下的数学模型通过Clack变换可以将模型简化,得到αβ正交坐标系下的表达式。原理如下图所示:
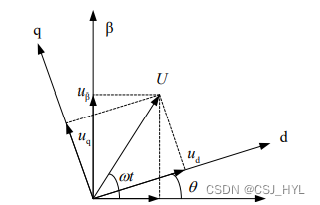
因为 Δ/Yo 变压器的存在使原边线电压和为零,所以原边不存在零序分 量,负载不平衡时作为扰动考虑,因此暂不考虑零轴,对应的变换关系为 式中,变换矩阵 将式(2.1)、(2.2)、(2.3)联立,可以得出对应在αβ坐标系的方程,式(2.4) 经过Clack变换后,减少了控制变量,简化了控制系统。并且αβ分量相互独立,没有耦合在一起,控制起来比较方便。但是传统的PI控制器对于追踪交流量效果并不好,会有静态误差产生。但对于直流量并不会产生静态误差,所以说还要进行Pack变换,将式(2.4)转换到dq坐标系下。 2.3 逆变器在dq轴坐标系下的数学模型将两相静止αβ 坐标系中的变量变换到两相旋转 dq 坐标系中称为 Park 变换,其原理如下图所示。
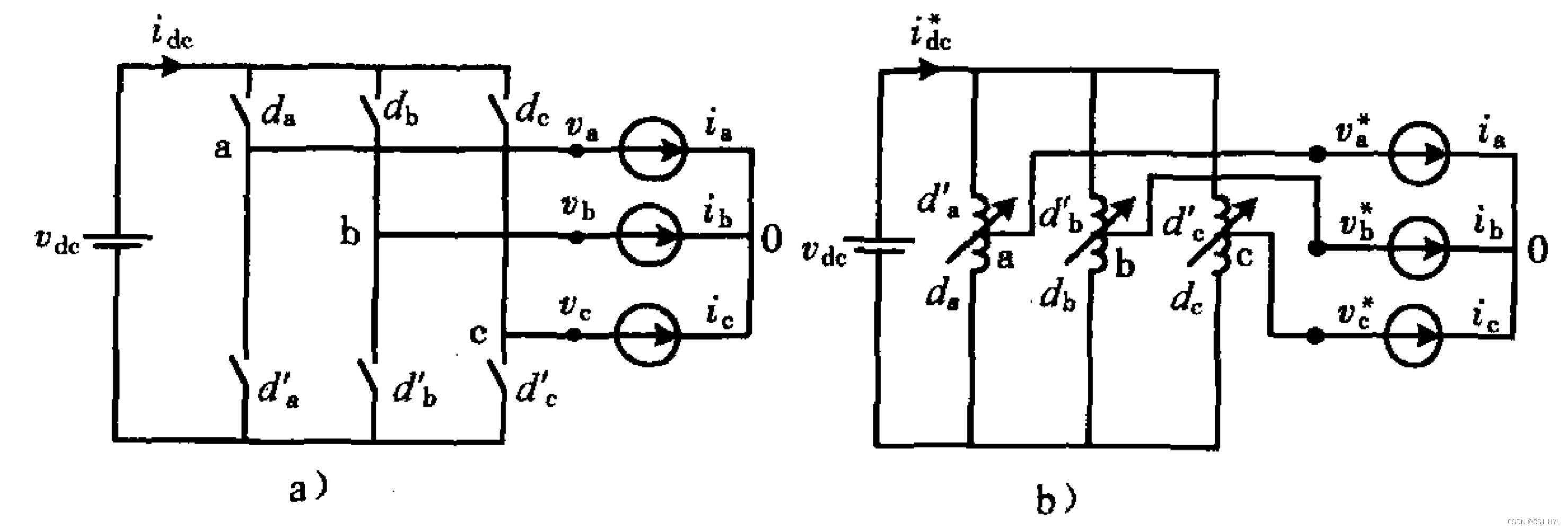
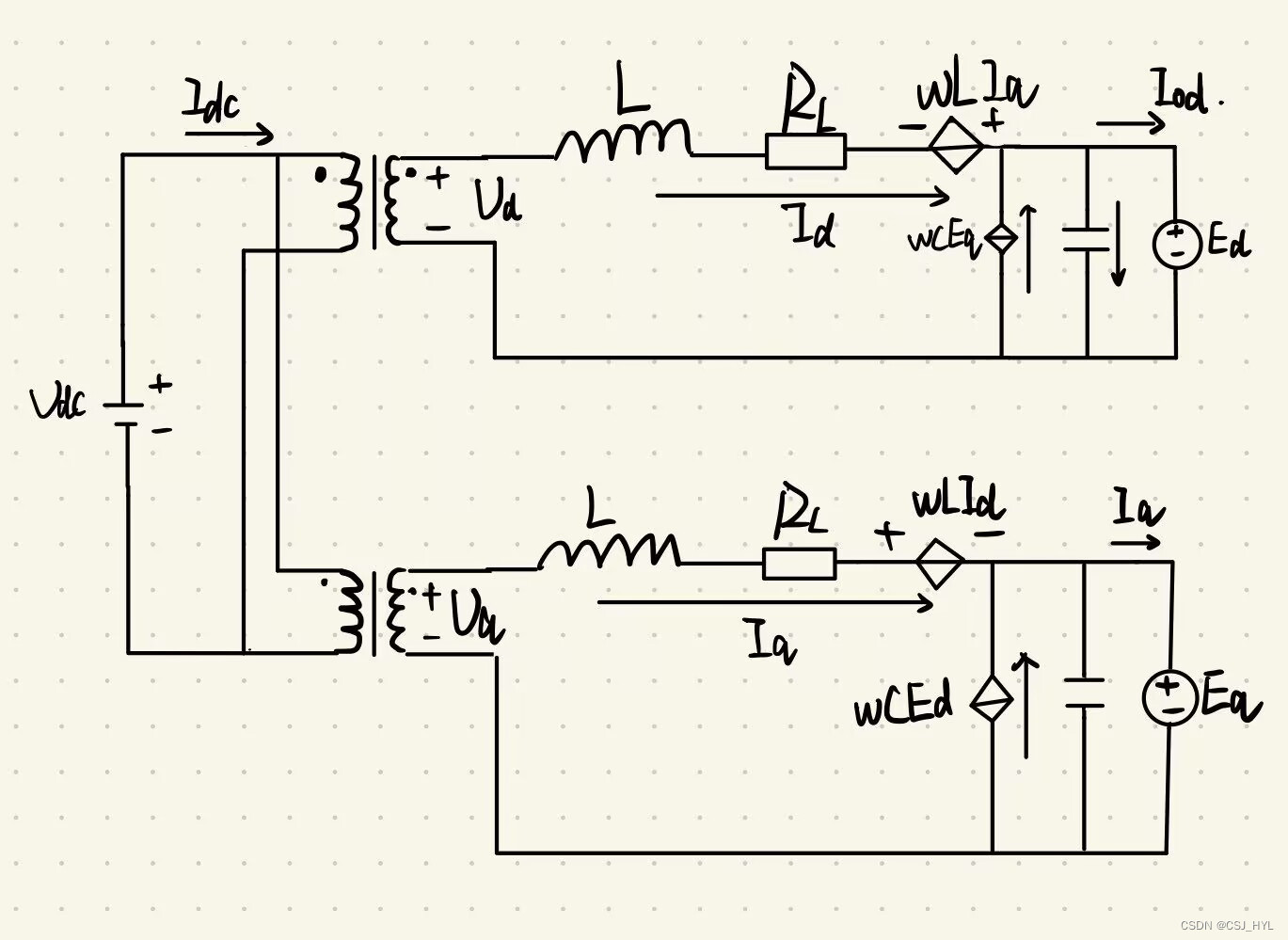
定义Park变换矩阵为 中,变换矩阵 通过联立式(2.4)、(2.5)可以得到对应在dq轴坐标系下的数学模型,表达式为: 通过 Park 变换可将数学模型转换到旋转坐标系下。因为坐标系与参考旋转矢量的旋转的方向还有速度是相同的,所以它们两个是相对静止,在旋转坐标系下为直流量, 能够简化数学模型,使控制更容易实现。 与此同时,也带来了缺点由图可以看出, 对于 d 轴,除控制量 在张兴的《PWM整流器》这本书中写到了这种等效变压器模型电路。
这里的 通过前面得出的dq坐标系下的数学模型,进一步可以得到dq坐标系下的变压器模型。通过这种模型可以帮助我们更好的去理解dq坐标系下的数学模型。
通过以上变换得到了逆变器在不同坐标系下的数学模型,为控制器的设计打下了良好的基础。实际上控制器是按照dq坐标系下建立数学模型。 这里在建立数学模型的时候并没有去考虑调制的方法,实际上调制的方法是用来产生Ua,Ub、Uc的,完成建立数学模型并且完成设计控制器,我们就能得到目标的Ua,Ub、Uc,然后根据目标的Ua,Ub、Uc去调制,输出PWM,来产生原边电压,进而达到我们的控制要求。 还有一点就是这里的变换是通过矩阵的形式,在坐标系转换的运算过程中也是通过矩阵运算来实现的。 例如: 其中, |
【本文地址】