| LIN总线开发:智能雨量传感器 | 您所在的位置:网站首页 › 自动雨刮乱刮 › LIN总线开发:智能雨量传感器 |
LIN总线开发:智能雨量传感器
|
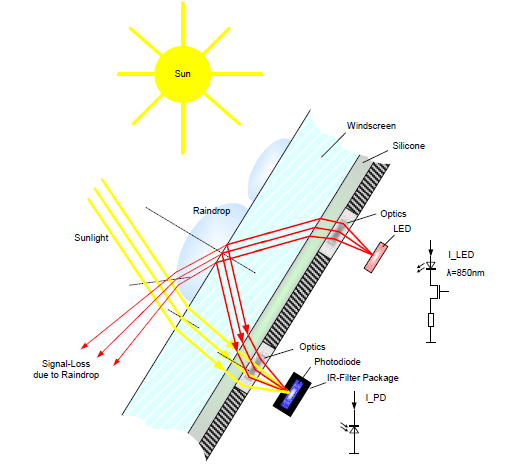
大众速腾 自动雨刮 雨水感应模块 长城系列 自动雨刮 雨水感应模块 --------------------------------------------------------------------------------- 雨水感应智能雨刮是多数高配车的标配,一般安装在前挡风玻璃靠近黑色颗粒膜,能够识别雨滴、环境光线,采用3线通信:VBAT,GND,LIN。 不同的车有不同的外形,大部分都是是带柄圆形,但是也有些例外,是圆角长方形。 不管什么外形的雨水传感器,其工作原理都是一样的:通过发射红外信号,打在玻璃上反射回到红外接收管。玻璃表面干燥的时候,所其反射的光线是固定不变的,玻璃表面有雨滴的时候,由于雨水产生的光线折射导致反射的红外光减少。 由于光学结构比较复杂,本文只介绍如何通过LIN总线读取传感器的数据。 上图中,黑色的是雨水传感器,带有柔性半透明软胶,估计这个软胶是为了更好地结合汽车玻璃,而且对光线的折射率应该比较接近汽车玻璃,否则这层介质会对光线产生很大的衰减。其引出接线有三个,分别为 12V(红色),GNG(黑色),LIN(白色)。经过仔细分析LIN数据,发现其中LIN总线遵循的是V1.3版本通信协议,并没有采用最新的V2.1版本。虽然大众系列的雨水感应器都是一样的,LIN数据也基本一致,但是奥迪系列的LIN数据却是使用的LIN V2.0协议,采用的增强型校验。其他系列的比如长城系列车型LIN数据也都不一样,无法通用。 不管是大众车系还是奥迪车系,其LIN总线上电初始化的时候都是采用0x3d,0x3c这两个PID,并且都是采用的V1.3版本的经典校验方法。 //设备上电初始化内容如下: Time LIN Identifier Flags DLC Data Counter ================================================================================== 7.890 06 H 0 1 7.908 3C 8 7f 06 b5 ff 7f 01 02 ff 2 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0102:通知所有节点,开始配置PID 7.920 3D H 0 3 7.927 3C 8 7f 06 b5 ff 7f 02 02 26 4 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0202:声明一个新的从机PID=0x26 7.940 3D H 0 5 7.947 3C 8 7f 06 b5 ff 7f 02 02 25 6 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0202:声明一个新的从机PID=0x25 7.960 3D H 0 7 7.967 3C 8 7f 06 b5 ff 7f 02 02 24 8 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0202:声明一个新的从机PID=0x26 7.980 3D H 0 9 7.987 3C 8 7f 06 b5 ff 7f 02 02 23 10 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0202:声明一个新的从机PID=0x23 8.000 3D H 0 11 8.007 3C 8 7f 06 b5 ff 7f 02 02 22 12 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0202:声明一个新的从机PID=0x22 8.020 3D H 0 13 8.027 3C 8 7f 06 b5 ff 7f 02 02 21 14 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0202:声明一个新的从机PID=0x21 8.040 3D H 0 15 8.047 3C 8 7f 06 b5 ff 7f 03 02 ff 16 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0302: 8.060 3D H 0 17 8.067 3C 8 7f 06 b5 ff 7f 04 02 ff 18 //0x7F 广播帧,NAD=0xB5,厂商ID=0XFF7F,功能ID=0X0402:声明结束,开始进入节点配置流程 8.080 3D H 0 19 8.087 3C 8 21 06 b7 00 50 61 ff ff 20 //配置从机节点,从机地址=0x21 8.098 3D 8 21 01 f7 ff ff ff ff ff 21 8.140 3D H 0 22 8.117 3C 8 21 01 b6 ff ff ff ff ff 23 8.128 3D 8 21 01 f6 ff ff ff ff ff 24 8.140 3D H 0 25 8.147 3C 8 22 06 b7 00 50 e2 ff ff 26 //配置从机节点,从机地址=0x22,SID=0XB7,需要从机响应 SID定义参考ISO15765-3. 8.158 3D 8 22 01 f7 ff ff ff ff ff 27 //响应帧,0xf7是响应RSID=SID+0X40 8.170 3D H 0 28 8.177 3C 8 22 01 b6 ff ff ff ff ff 29 //同上,以下类似 8.188 3D 8 22 01 f6 ff ff ff ff ff 30 //同上,以下类似 8.200 3D H 0 31 8.207 3C 8 23 06 b7 00 50 a3 ff ff 32 8.218 3D 8 23 01 f7 ff ff ff ff ff 33 8.230 3D H 0 34 8.237 3C 8 23 01 b6 ff ff ff ff ff 35 8.248 3D 8 23 01 f6 ff ff ff ff ff 36 通信数据如下: Time CAN Identifier Flags DLC Data Counter ================================================================================== 35.273 41 H 0 2348 35.284 34 4 62 00 83 06 2349 35.294 48 5 d3 02 01 00 00 2350 35.304 49 5 01 00 00 00 00 2351 35.333 41 H 0 2352 35.344 34 4 63 00 83 06 2353 35.354 48 5 d4 02 01 00 00 2354 35.364 49 5 01 00 00 00 00 2355 35.393 41 H 0 2356 35.404 34 4 64 00 83 06 2357 35.414 48 5 d5 02 01 00 00 2358 35.424 49 5 01 00 00 00 00 2359 35.453 41 H 0 2360 35.464 34 4 65 00 83 06 2361 35.474 48 5 d6 02 01 00 00 2362 35.484 49 5 01 00 00 00 00 2363 35.513 41 H 0 2364 35.523 34 4 66 00 83 06 2365 35.534 48 5 d7 02 01 00 00 2366 35.544 49 5 01 00 00 00 00 2367 35.573 41 H 0 2368 35.584 34 4 67 00 83 06 2369 35.594 48 5 d8 02 01 00 00 2370 35.604 49 5 09 00 00 00 00 2371 35.633 41 H 0 2372 35.644 34 4 68 00 83 06 2373 35.654 48 5 d9 02 01 00 00 2374 35.664 49 5 01 00 00 00 00 2375 35.693 41 H 0 2376 35.704 34 4 69 00 83 06 2377 。。。
这些数据包括了心跳包数据、同步数据、单独的报文头、诊断数据、以及休眠控制等。当然还有雨水数字、光线等级、内部温度等所需要的关键数据,这些可以通过专门工具把LIN数据转为串口数据,用UI来进行直观分析: 波特率实际为19200,并不是图中显示的38400. 实际测试发现,不管哪种的雨光传感器,都有少概率的检测错误现象,经试验测试发现,非常容易受到灰尘、光线、油污等影响。不过这并不影响雨水传感器的应用,少概率的误动作并不对安全行车造成严重干扰。 这些LIN数据应用对象主要是自动雨刮、自动大灯,当然也可以应用到自动关窗器中。可以实现更加智能的关窗功能:检测下雨则立即关窗,检测到阳光则开窗透气。而且在此类应用场景中,对于雨光传感器的要求没有那么高,灵敏度也不需要太高,因此光学透镜可以使用简易透镜以降低成本。 相关链接: https://item.taobao.com/item.htm?spm=a1z38n.10677092.0.0.4c281debdsqvlz&id=581464027464 |




【本文地址】