| 振动信号分析 | 您所在的位置:网站首页 › 积分转换 › 振动信号分析 |
振动信号分析
|
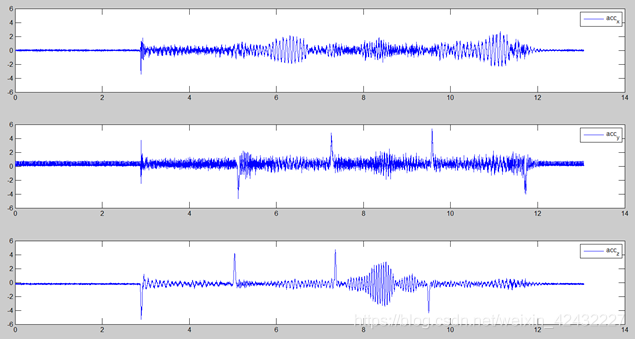
1. 对于工业机器人而言,由于柔性的存在,在某个路径和速度下,会发生共振,此时可能会在TCP端产生肉眼可见的抖动。为了量化工业机器人TCP端的抖动,一般是在TCP端通过加速度计或者陀螺仪来采集机器人的加速度信号。这里主要介绍用双重积分的方法来处理加速度信号。这里介绍一个机器人走矩形路径时的加速度信号处理方法。 2. 加速度信号双重积分的步骤: 1) 对于采集到的加速度信号,创建一个参考信号,去除矩形路径换向时产生的高频信号。有效信号=原始信号-参考信号 2) 运用高通滤波去除路径噪声,运用低通滤波去除噪声。 3) 将滤波后的加速度信号积分成速度信号 4) 将速度信号积分成位置信号,运用高通滤波去除漂移。 5)将三维的位置信号进行矢量求和。 3. 举例说明: a) 原始加速度信号
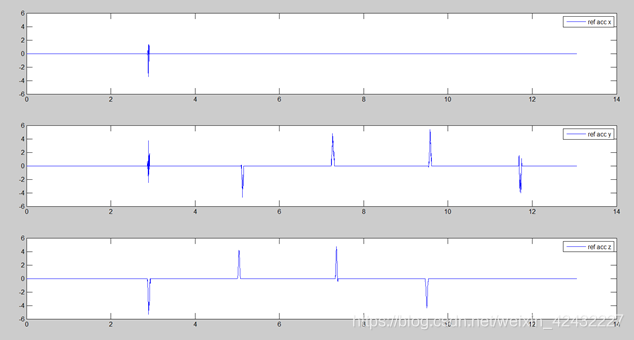
创建参考信号(主要是去除换向信号)
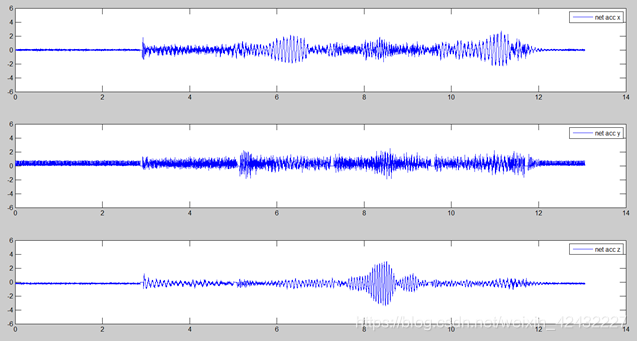
有效加速度信号=原始信号-参考信号
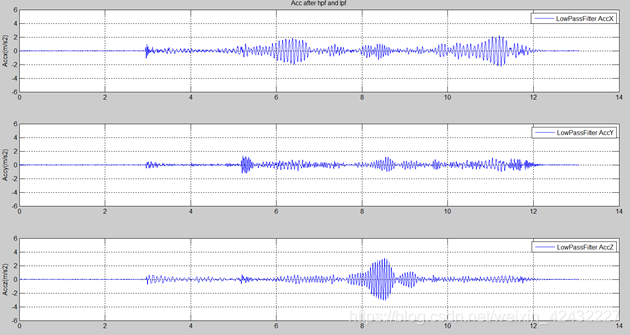
b) 使用高通滤波和低通滤波分别去除路径漂移和噪声信号
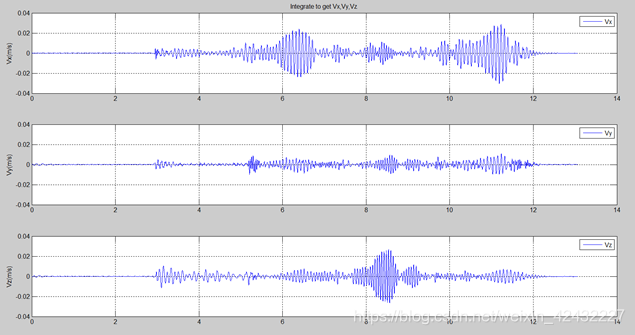
使用的滤波器是butter worth滤波器,butter worth高通滤波器code如下 Wh = 2*hpf_fre/fs; [b_high,a_high]=butter(8,Wh,'high'); hpf_ax=filter(b_high,a_high,Ax);c) 将滤波后的加速度信号积分成速度信号,使用cumtrapz函数进行数值积分
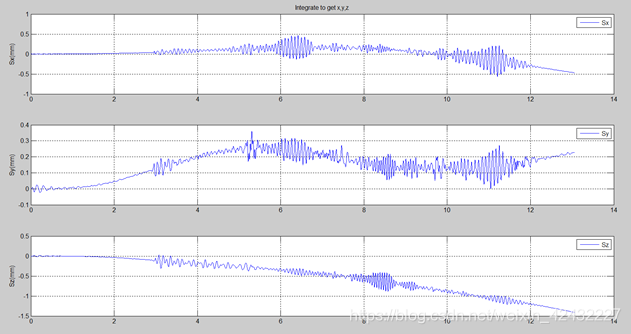
d) 将速度信号积分成位置信号
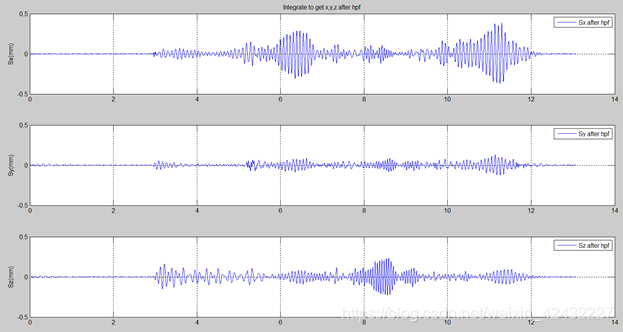
可以看到,位置信号存在漂移现象,运用高通滤波去趋势。结果如下:
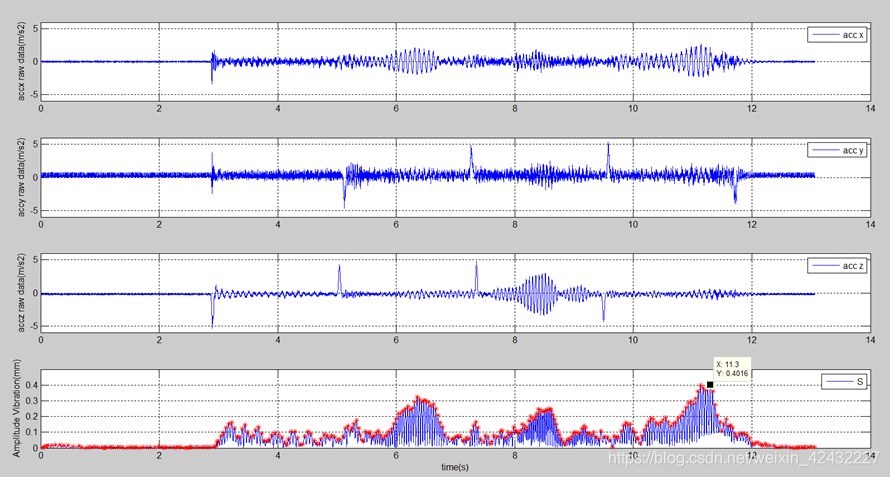
e) 对位置信号进行矢量求和,红色部分是最终的位移信号的幅值曲线。
4. 结论:该方法证明了双重数值积分来处理加速度信号时有效的。 |
【本文地址】
公司简介
联系我们