| 机器人运动学逆解中最常用的三角方程(附代码) | 您所在的位置:网站首页 › 怎么解正弦函数的方程 › 机器人运动学逆解中最常用的三角方程(附代码) |
机器人运动学逆解中最常用的三角方程(附代码)
机器人运动学逆解中最常用的三角方程(附代码)
 Marc Pony
分类:机器人学
发布时间 2021.06.21阅读数 6386 评论数 1
文章目录
一、推导步骤
1、方法1
2、方法2
二、实例(以SCARA机器人逆解为例)
Marc Pony
分类:机器人学
发布时间 2021.06.21阅读数 6386 评论数 1
文章目录
一、推导步骤
1、方法1
2、方法2
二、实例(以SCARA机器人逆解为例)
在推导机器人运动学逆解的解析解时,经常会遇到以下三角方程:
求解以上三角方程的解析解对运动学逆解的推导过程至关重要。下面采用两种方法进行推导。 一、推导步骤 1、方法1式(1)联立以下三角恒等式:
利用MATLAB解符号方程组(1)(2),代码如下: clc; clear; syms k1 k2 k3 theta sinTheta cosTheta real result = solve(k1 * sinTheta + k2 * cosTheta == k3, sinTheta^2 + cosTheta^2 == 1, [sinTheta, cosTheta]); sinTheta = simplify(result.sinTheta) cosTheta = simplify(result.cosTheta)很容易求得两组解:
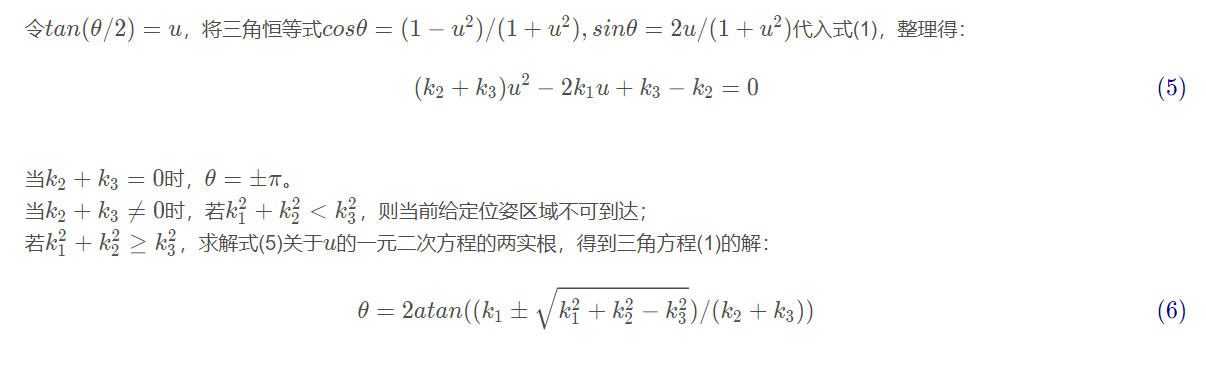
若 这里采用双变量反正切函数atan2,有几个优点,详见博文:为什么机器人运动学逆解最好采用双变量反正切函数atan2而不用反正/余弦函数? 2、方法2
在博文:scara机器人运动学正逆解中,采用几何法推导得到机器人的运动学逆解,本文采用代数法来求运动学逆解。 SCARA机器人的运动学正解为:
MATLAB代码: clc; clear; L1 = 200.0; %mm L2 = 300.0; %mm theta1 = 1.0; %rad theta2 = 3.0; %rad x = L1 * cos(theta1) + L2 * cos(theta1 + theta2); y = L1 * sin(theta1) + L2 * sin(theta1 + theta2); disp(['输入角度(rad):',num2str(theta1), ',', num2str(theta2)]) disp(['输入x,y(mm):',num2str(x), ',', num2str(y)]) k1 = 2.0 * y * L1; k2 = 2.0 * x * L1; k3 = x^2 + y^2 + L1^2 - L2^2; temp = k1^2 + k2^2 - k3^2; if temp < -eps disp('区域不可到达'); return; elseif temp < eps disp('奇异点'); else %do nothing end theta1 = zeros(2, 1); theta1(1) = atan2(k1 * k3 - k2 * sqrt(temp), k2 * k3 + k1 * sqrt(temp)); theta1(2) = atan2(k1 * k3 + k2 * sqrt(temp), k2 * k3 - k1 * sqrt(temp)); s1 = sin(theta1); c1 = cos(theta1); theta2 = atan2(y - L1 * s1, x - L1 * c1) - theta1; for i = 1 : 2 if theta2(i) > pi theta2(i) = theta2(i) - 2.0 * pi; end if theta2(i) < -pi theta2(i) = theta2(i) + 2.0 * pi; end end xx = L1 * cos(theta1) + L2 * cos(theta1 + theta2); yy = L1 * sin(theta1) + L2 * sin(theta1 + theta2); disp(['输出角度(rad):',num2str(theta1(1)), ',', num2str(theta2(1)), '; ', num2str(theta1(2)), ',', num2str(theta2(2))]) disp(['输出x,y(mm):',num2str(xx(1)), ',', num2str(yy(1)), '; ', num2str(xx(2)), ',', num2str(yy(2))]) 机器人学运动学建模仿真三角方程
打赏 0 点赞 0 收藏 0 分享 微信 微博 QQ 图片 上一篇:为什么机器人运动学逆解最好采用双变量反正切函数atan2而不用反正/余弦函数? 下一篇:一文带你完全掌握机器人DH参数建模(详细步骤+实例+代码) |






【本文地址】
公司简介
联系我们