| 如何用Bode图判断系统的稳定性? | 您所在的位置:网站首页 › 伯德怎么伤的 › 如何用Bode图判断系统的稳定性? |
如何用Bode图判断系统的稳定性?
|
众所周知,基于波特图的“工程性”稳定性判据是: 增益裕量GM>0,相位裕量PM>0@电气小混混 在他的答案中提到这条判据是有前提条件的,仅适用于最小相位系统。 这样的说法,我只能同意一半。 更为严谨的描述应为:增益裕量GM>0,相位裕量PM>0 的稳定性判据,仅能适用于典型的系统的稳定性判断。 即,前提条件与是不是最小相位系统无关,而取决于系统是否“典型”。 后文将以具体的传递函数为例,一一说明有哪些“非典型”的系统,让增益裕量和相位裕量的使用出现严重的局限,甚至直接失效。 想要从频域的角度准确判断系统的稳定性,建议从奈奎斯特图出发,而不是Bode图。 典型奈奎斯特图→波特图稳定裕量为了便于观察波特图的稳定裕量,以常见的: 0型(分母不含s),ω从0°出发(Re正轴),回到-270°(Im正轴)1型(分母含s的一次方),ω从-90°出发(Im负轴),回到-270°(Im正轴)2型(分母含s的二次方),ω从-180°出发(Re负轴),回到-270°(Im正轴)系统为例,把三个系统的穿越频率ωc放在重合的位置,给出如下图示。 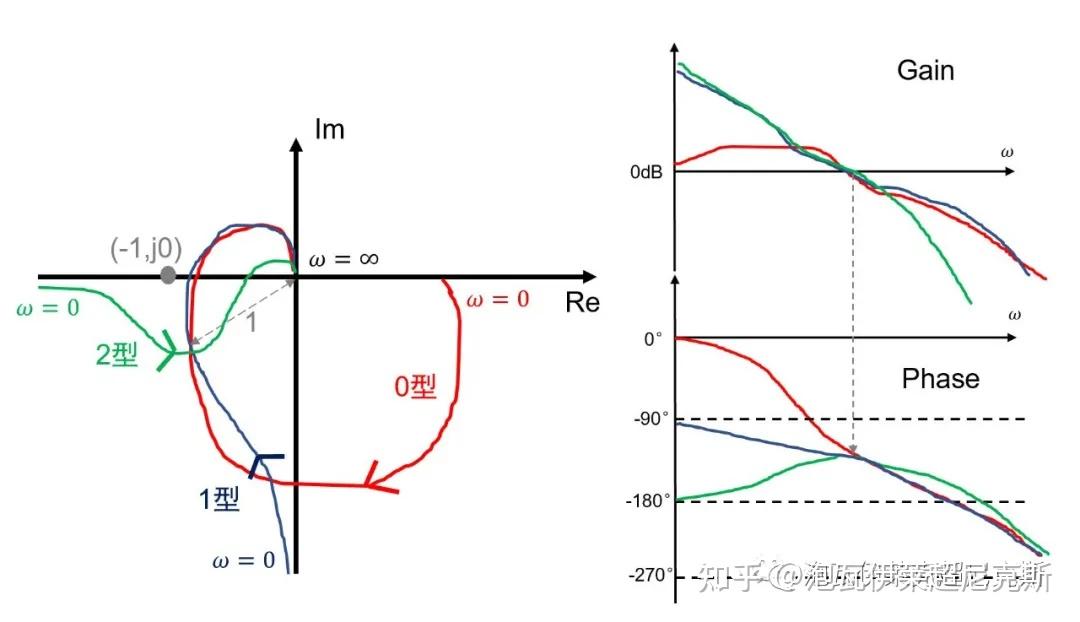 三种类型系统的波特图和奈奎斯特图 三种类型系统的波特图和奈奎斯特图由图,三者的相位裕量PM≈45°相同,增益裕量GM则是绿色的2型系统大,红色0型和蓝色1型系统小。 结论:典型形状的奈奎斯特图,对应到波特图时,稳定裕量GM/PM的物理意义是非常明确的,便于稳定裕量的定义,和稳定性判据的使用。 非典型系统→增益裕量无穷大考察开环传递函数 G=s/(1+s)  G=s/(1+s)的频域 G=s/(1+s)的频域奈奎斯特图的增益无论如何增大,奈奎斯特图也不会包围(-1,j0),故有GM=+∞;奈奎斯特图与Re正轴交点是(1,j0),故有PM=180°。 再看波特图,与奈奎斯特图相对应,我们找不到幅频曲线与0dB交点,也找不到相频曲线与-180°交点。只能认为,频率无穷大处幅频与0dB相交,此时可以推出PM=180°;而相频永远不与-180°相交,所以GM=+∞。 考察开环传递函数 G=1/(s*s*(s+1)) 这种系统是2型系统中的“结构不稳定”系统:若其分子增益和分母中一阶子系统的时间常数可调,无论如何调参,其闭环以后均不能稳定。  G=1/(s*s*(s+1))的频域 G=1/(s*s*(s+1))的频域由奈奎斯特图可知,Z=N+P=1+0=1,闭环系统不稳定,且可以看出相位裕量PM为负,GM的话只有=-∞才有可能让极坐标图穿越(-1,0)。 再看波特图,PM为负是明确的;同时相频在频率为0处与-180°相交,故GM=-∞。 结论:当相频不与-180°明显相交,仅从波特图观察稳定裕量GM并不十分直观。 局限1→幅频多次穿越0dB考察开环传递函数 G=2*(s+0.05)*(s+0.1)/(s*(s+1)*(s+0.5))  G=2*(s+0.05)*(s+0.1)/(s*(s+1)*(s+0.5))的频域 G=2*(s+0.05)*(s+0.1)/(s*(s+1)*(s+0.5))的频域波特图的幅频曲线,多次穿越0dB,给相位裕量PM的认定造成困扰。 由奈奎斯特图可知,Z=N+P=0+0=0,闭环系统稳定,增益裕量GM=+∞。  上图(-1,j0)附近的Zoom In 上图(-1,j0)附近的Zoom In系统在频率1,频率2,频率3处依次穿越0dB线,当曲线顺时针旋转到频率1的位置与(-1,j0)相交后,系统已经开始不稳定。因此,相位裕量PM由频率1处(最小的穿越频率)的相角决定。 然而,倘若奈奎斯特曲线如下,当曲线顺时针旋转到频率3的位置与(-1,j0)相交后,系统已经开始不稳定。因此,相位裕量PM由频率3处(最大的穿越频率)的相角决定。  另一种多次穿越0dB的情形结论: 另一种多次穿越0dB的情形结论:幅频多次穿越0dB,相位裕量PM可能由最小或者最大穿越频率处决定,取决于奈奎斯特图的具体形状。 局限2→相频多次穿越-180°考察开环传递函数 G=15*(s+5)*(s+15)/((s*s+s+1)*(s+0.5)*(0.01*s+1))  G=15*(s+5)*(s+15)/((s*s+s+1)*(s+0.5)*(0.01*s+1))的频域 G=15*(s+5)*(s+15)/((s*s+s+1)*(s+0.5)*(0.01*s+1))的频域放大奈奎斯特图(-1,j0)附近穿越的细节,以观察频率2和频率3:  上图(-1,j0)附近的Zoom In 上图(-1,j0)附近的Zoom In该例波特图中,相位裕度PM=31°是易见的,但相频曲线,多次穿越-180°,给增益裕量GM的认定造成困扰。 由该例的奈奎斯特图可知,Z=N+P=-1+1+0=0,闭环系统稳定,且应该得到增益裕量GM=+∞。 然而,上例只是特例,更普遍的,多次穿越-180°,形似该形状的奈奎斯特曲线可称作"条件稳定"系统。如下,(-1,j0)可能位于如下箭头指向的四个区间(1左侧,1-2,2-3,3-4)。 若(-1,j0)在频率1左侧,则存在若干的不连续增益区间,使系统稳定。这样一来,增益裕量GM是无法定义的:不存在一个GM,使得系统增益超过它后就不稳定,因为一个更大的增益区间会使系统又重新稳定。  条件稳定系统结论: 条件稳定系统结论:幅频多次穿越-180°,若是“条件稳定”系统,增益裕量GM无法定义,失去物理意义。 失效→增益裕量GMG=5*(s+3)/(s*(s-1))的频域由波特图,增益裕量GM=-14dB0,根据判据,判为闭环不稳定系统吗? 再看奈奎斯特图,由于开环函数G含有一个右半平面不稳定极点,即P=1,那么Z=N+P=-1+1=0,闭环系统稳定! 结论:存在开环不稳定的非最小相位系统,其波特图稳定裕量判据是:增益裕量GM0。 总结基于波特图的稳定裕量和稳定性判据,仅仅是针对典型系统的“工程性”简化方法。 奈奎斯特图才是判断系统绝对稳定性和相对稳定性的有效频域工具。 *注:奈奎斯特稳定性判据在不同资料中形式不尽相同,本回答采用的定义如下。 Z为闭环系统不稳定的极点个数,Z=0代表闭环系统稳定;P为开环函数不稳定极点数,N为完整正负频域的闭合奈奎斯特曲线包围(-1,j0)的带符号圈数总和,顺时针计为+,逆时针计为-。 欢迎关注我关于控制理论的其他回答初学自动控制原理应该看什么书? - 知乎 (zhihu.com) 如何理解「时间常数(time constant)」这个概念? - 知乎 (zhihu.com) 控制研究中的「带宽」怎样理解? - 知乎 (zhihu.com) 伯德图中的相角裕量和幅值裕量有什么物理意义? - 知乎 (zhihu.com) 不稳定系统的频率响应(伯德图)的物理意义是什么? - 知乎 (zhihu.com) 非最小相位系统如何利用频域法设计控制器? - 知乎 (zhihu.com) 为什么传递函数分母中s的阶数n必不小于分子中s的阶数m? - 知乎 (zhihu.com) 为什么微分环节不容易实现呢? - 知乎 (zhihu.com) 关于DC-DC中PI控制器环路补偿的疑问? - 知乎 (zhihu.com) |
【本文地址】