| 一种液体火箭发动机试验零漂数据处理方法及系统 | 您所在的位置:网站首页 › lmbp算法 › 一种液体火箭发动机试验零漂数据处理方法及系统 |
一种液体火箭发动机试验零漂数据处理方法及系统
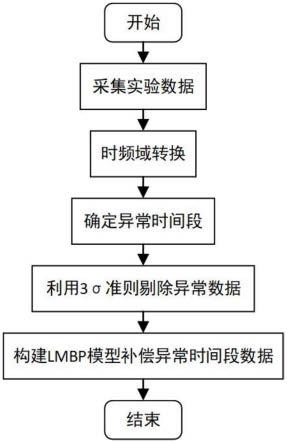 1.本发明涉及液体火箭发动机试验测量领域以及人工智能技术领域,具体为一种液体火箭发动机试验零漂数据处理方法及系统。 背景技术: 2.液体火箭发动机技术领域广泛,工作环境恶劣,从开发到最终应用都需要进行大量的地面和高空模拟试验。大量测试数据用于确定发动机性能指标和评估发动机可靠性。由于被测信号主要由传感器和采集设备获取,传感器和仪器不可避免的故障可能导致测试参数数据不准确或不可用。3.在火箭地面实验中,通常使用压电传感器来采集振动信号,测试现场恶劣的环境条件会因串联模式干扰、共模干扰、电气噪声、温度、振动等对测量信号产生干扰和噪声,从而导致零点漂移。而针对加速度计测数据零点漂移大的问题,现有的方法多针对传感器选择进行优化实验,适用性不强,可靠性不高,往往无法用于其他测试环境,并且缺少从数据补偿处理方面的方法,因此,在不改变现有实验条件的情况下,采用数据补偿处理方法是非常必要的。 技术实现要素: 4.针对现有技术中存在的问题,本发明提供一种液体火箭发动机试验零漂数据处理方法及系统,提高了实验测量的加速度数据质量,保证后续数据分析。5.本发明是通过以下技术方案来实现:6.一种液体火箭发动机试验零漂数据处理方法,包括以下步骤:7.步骤1、获取液体火箭发动机地面和高空试车试验的振动加速度数据,并确定振动加速度数据的零漂数据;8.步骤2、确定零漂数据的异常数据并对采用任一零漂数据对其替代,得到剔除异常数据的零漂数据;9.步骤3、构建bp神经网络,采用步骤2得到的零漂数据作为样本数据,并以最小误差为目标优化bp神经网络;10.步骤4、根据优化的bp神经网络构建lmbp神经网络并进行训练,以步骤1中未发生零漂的振动加速度数据为标准输入,训练后的lmbp神经网络输出步骤2补偿数据,采用补偿数据更新对步骤2替代零漂数据。11.优选的,步骤1所述零漂数据的确定方法如下:12.对振动加速度数据进行时频域转换,以零线为基准线,将漂离基准线的数据作为零漂数据。13.优选的,所述时频域转换的方法如下:14.15.其中,f为采样频率,ω为角频率。16.优选的,步骤2中异常数据的剔除方法如下:17.利用3σ理论,以标准误差σ概率为区间,当各零漂数据的残余误差的绝对值vi》3σ时,将该零漂数据作为异常数据。18.优选的,步骤2中采用任一零漂数据所有正常值的均值对该异常数据进行替代。19.优选的,所述标准误差的表达式如下:[0020][0021]其中,δi为剩余误差,n为样本个数。[0022]优选的,步骤3中采用levenberg-marquardt优化算法,利用剔除异常数据的零漂数据以mine(x*)为目标对权阈值组合解x*(k)进行修正,优化bp神经网络,mine(x*)为实际输出和期望输出的最小差值。[0023]优选的,所述bp神经网络的最小误差对应的解的表达式如下:[0024][0025]其中,x*为所求结构为m-p-n神经网络的权阈值的组合,n1为训练样本个数,yk为第k个样本实际输出,tk第k个样本期望输出。[0026]优选的,步骤4中所述lmbp神经网络利用所有振动加速度数据以mine(x*)为目标对权阈值组合解进行修正,第k+1次迭代的新解的表达式如下:[0027][0028]lmbp神经网络的权阈值变化量δx*的表达式如下:[0029]δx*=-(jt(x*)·j(x*)+μi)-1jt(x*)·e(x*)[0030]式中,j(x*)为jacobian矩阵,e(x*)为第i次迭代网络结点输出误差,i为单位矩阵,μ为比例系数。当μ→0时,μi→0,忽略不计,δx*=-(jt(x*)·j(x*))-1jt(x*)·e(x*),当μ→∞时,jt(x*)·j(x*)《《μi,忽略不计,此时,δx*=-(μi)-1jt(x*)·e(x*)。[0031]一种液体火箭发动机试验零漂数据处理方法的系统,包括,[0032]零漂数据采集模块,用于获取液体火箭发动机地面和高空试车试验的振动加速度数据,并确定振动加速度数据的零漂数据;[0033]异常数据处理模块,用于确定零漂数据的异常数据并对其进行剔除,得到剔除后的零漂数据;[0034]bp神经网络模块,用于构建bp神经网络,采用步骤2得到的零漂数据作为样本数据,并以最小误差为目标优化bp神经网络;[0035]lmbp神经网络模块,用于根据优化的bp神经网络构建lmbp神经网络并进行训练,以未发生零漂的振动加速度数据为标准输入,训练后的lmbp神经网络输出补偿数据,采用补偿数据对剔除的异常数据进行补偿。[0036]与现有技术相比,本发明具有以下有益的技术效果:[0037]本发明的一种液体火箭发动机试验零漂数据处理方法,从补偿零位漂移数据、剔除异常数据方面综合解决零漂问题,应用于液体火箭发动机振动试验,提高了实验测量的加速度数据质量,保证后续数据分析。本发明从数据数据驱动层面,在确定采集到的实验测得的振动加速度数据异常时间段之后,利用levenberg-marquardt算法对bp神经网络进行优化,并引入标准差法建立3σ-lmbp算法,剔除异常数据并补偿异常时间段数据,有效提高数据质量,解决零漂现象问题。附图说明[0038]图1为本发明液体火箭发动机试验零漂数据处理方法的流程图;[0039]图2为本发明异常数据剔除的流程图;[0040]图3为本发明lmbp神经网络的训练流程图。具体实施方式[0041]下面结合附图对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。[0042]参阅图1-3,一种液体火箭发动机试验零漂数据处理方法,包括以下步骤:[0043]步骤1、利用压电式传感器,记录液体火箭发动机地面和高空试车试验的振动加速度数据,将记录的数据进行时频域转换,以零线为基准线,确定漂离基准线的异常数据段的零漂数据。[0044]具体的,利用压电式加速度传感器,以25600hz频率采集振动加速度数据,并按频率周期依据公式进行时频域转换,其中f为采样频率,ω为角频率,并以零线为基准线,将漂离基准线的数据作为零漂数据。[0045]步骤2、确定零漂数据的异常数据并对其进行剔除,得到剔除后的零漂数据;[0046]利用3σ理论,以σ概率为区间,当各零漂数据的残余误差的绝对值vi》3σ时,将该零漂数据作为异常数据并将其进行剔除。[0047]在异常数据剔除中,采用3σ准则剔除异常值,设某一零漂数据的值分别为x1,x2,…,xn,算出其算术平均值及剩余误差δi=xi-x0,利用贝塞尔公式计算标准误差σ,计算公式如下:[0048][0049]其中,δi为剩余误差,n为样本个数。[0050]当则xi为正常值,予以保留,当则xi为异常值,应予剔除,并采用任一零漂数据所有正常值的均值对该异常值进行替代。[0051]步骤3、构建bp神经网络,采用步骤2得到的零漂数据作为样本数据,并以最小误差为目标优化bp神经网络;[0052]采用levenberg-marquardt优化算法,利用剔除异常数据的零漂数据以mine(x*)为目标对权阈值组合解进行修正,优化bp神经网络。[0053]其中,mine(x*)为实际输出和期望输出的最小差值。[0054]bp神经网络寻优过程实质是求出所求问题的最小误差对应的解,其数学描述如式(1)所示:[0055][0056]其中,x*为所求结构为m-p-n神经网络的权阈值的组合,n1为训练样本个数,yk为第k个样本实际输出,tk第k个样本期望输出。mine(x*)为实际输出和期望输出的最小差值。[0057]步骤4、根据优化的bp网络构建lmbp神经网络,以步骤1中未发生零漂的振动加速度数据为标准输入对lmbp神经网络进行训练,训练后lmbp神经网络输出补偿数据,采用补偿数据对步骤2替代异常数据的零漂数据进行替换。[0058]利用levenberg marquardt优化过后的bp神经网络,同时具有梯度下降寻优和高斯牛顿法的优点,然后采用lmbp算法建立lmbp神经网络并训练,lmbp神经网络设置3层输入层,5层隐含层,1层输出层,将未发生零漂的加速度数据集以7:1.5:1.5的比例将其划分为训练集、测试集和验证集。[0059]lmbp算法与梯度下降算法使用局部样本信息修正权阈值的计算过程不同,lmbp算法利用步骤1中所有未发生零漂的振动加速度数据以mine(x*)为目标对权阈值组合解进行修正,第k+1次迭代的新解的计算如式(2)所示,权阈值变化量δx*的计算如式(3)所示。[0060][0061]δx*=-(jt(x*)·j(x*)+μi)-1jt(x*)·e(x*)ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ(4)[0062]式中,j(x*)为jacobian矩阵,e(x*)为第i次迭代网络结点输出误差,i为单位矩阵,μ为比例系数。当μ→0时,μi→0,忽略不计,δx*=-(jt(x*)·j(x*))-1jt(x*)·e(x*),当μ→∞时,jt(x*)·j(x*)《《μi,忽略不计,此时,δx*=-(μi)-1jt(x*)·e(x*)。[0063]实施例1[0064]s1:以25600hz记录现场振动试验数据,将其保存为txt文件。[0065]s2:根据液体火箭发动机现场振动试验测试采集频率,将加速度传感器测得的加速度数据按频率周期依据公式进行时域转换,并以零线为基准线,将漂离基准线的数据作为零漂数据。[0066]s3:对步骤s2中确定的)零漂数据进行异常值剔除,图2是数据异常值剔除流程图。首先,利用3σ准则剔除异常值,当则xi为正常值,予以保留,当则xi为异常值,应予剔除,用某一变量所有正常值的均值代替。[0067]s4:构建bp神经网络,采用步骤2得到的零漂数据作为样本数据,并以最小误差为目标优化bp神经网络;[0068]s5:构建lmbp神经网络,并采用s2中未发生零漂的振动加速度数据作为输入对lmbp神经网络进行训练,图3是lmbp的训练流程图。首先,读取数据集,对其进行归一化处理,以消除量纲差异;其次,将归一化后的数据按7:1.5:1.5的比例划分为训练集、测试集和验证集;[0069]lmbp神经网络包含三个输入层、五个隐含层和一个输出层,学习率设置为0.02,权重和偏差进行随机初始化,通过训练集来更新迭代权重和偏差,验证集来验证训练准确度,避免过拟合,测试集评估模型最终训练结果,最后,通过模型的输出,进行对剔除数据段进行有效补偿。[0070]本发明从数据数据驱动层面,在确定采集到的实验测得的振动加速度数据异常时间段之后,利用levenberg-marquardt算法对bp神经网络进行优化,并引入标准差法建立3σ-lmbp算法,剔除异常数据并补偿异常时间段数据,有效提高数据质量,解决零漂现象问题。[0071]以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。 |
【本文地址】