| C语言学习笔记 | 您所在的位置:网站首页 › c语言中输出怎么表示出来 › C语言学习笔记 |
C语言学习笔记
|
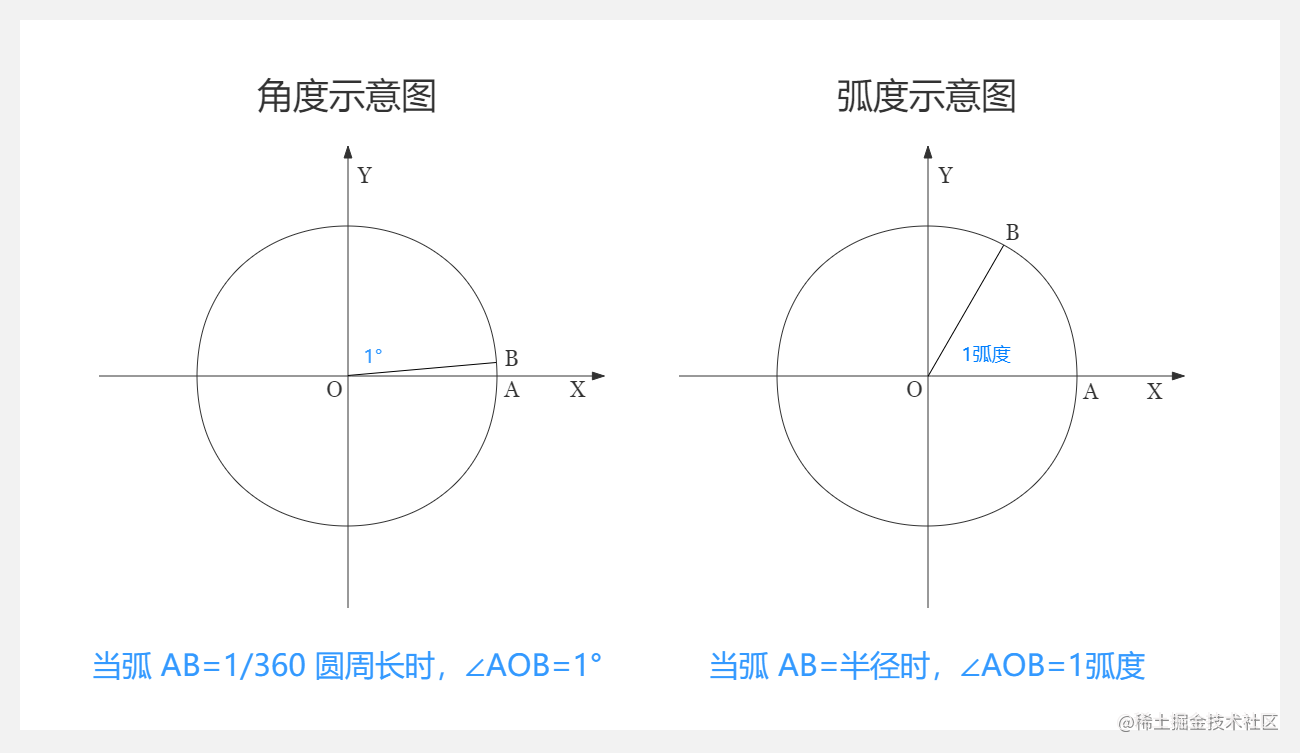
在C语言标准库里面提供了常用的三角函数,在头文件math.h里面可以看到函数的相关定义。 double __cdecl sin(double _X); double __cdecl cos(double _X); double __cdecl tan(double _X); double __cdecl asin(double _X); double __cdecl acos(double _X); double __cdecl atan(double _X); double __cdecl atan2(double _Y,double _X);其中sin、cos、tan 函数的参数是一个用弧度表示的角度,分别返回这个角度的正弦、余弦、正切值。 度和弧度都是衡量角的大小的单位。度用 ° 来表示,弧度用rad表示。 弧度的定义 在一个圆中,弧长等于半径的弧,其所对的圆心角就是 1rad。也就是说,两条射线从圆心向圆周射出,形成一个夹角和夹角正对的一段弧。当这段弧的长度正好等于圆的半径时,两条射线的夹角的弧度为 1。 度的定义 两条射线从圆心向圆周射出,形成一个夹角和夹角正对的一段弧。当这段弧长正好等于圆周长的360分之一时,两条射线的夹角的大小为1度。
由此可知: 1度=π/180 弧度 ( ≈0.017453弧度 ) 因此,得到 把度化成弧度的公式: 弧度=度×π/180 例如: 30°=30×π/180 =π/6 弧度45°=45×π/180 =π/4 弧度60°=60×π/180 =π/3 弧度90°=90×π/180 =π/2 弧度120°=120×π/180 =2π/3 弧度180°=180×π/180 =π 弧度反过来,弧度化成度怎么算? 因为 π弧度=180° 所以 1弧度=180°/π (≈57.3°) 因此,可得到 把弧度化成度的公式: 度=弧度×180°/π 例如: π/2 弧度=π/2 ×180°/π =90°4π/3 弧度=4π/3 ×180°/π =240°sin、cos、tan 函数定义如下:
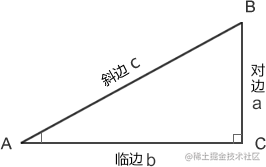
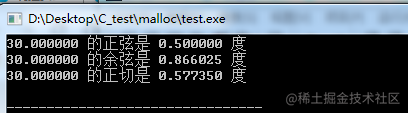
在直角三角形 ABC 中(其中角 C 为 90°),角 A 的正弦就是它的对边长度和三角形斜边长度的比值,sinA = a / c。 在直角三角形 ABC 中(其中角 C 为 90°),角 A 的余弦就是它的临边长度和三角形斜边长度的比值,cosA = b / c。 在直角三角形 ABC 中(其中角 C 为 90°),角 A 的正切就是它的对边长度和临边长度的比值,tanA = a / b。 下面就通过一段简单的代码来演示一下这几个三角函数的用法。 #include #include #define PI 3.14159265 int main () { double x, ret, val; x = 30.0; val = PI / 180; ret = sin(x*val); printf("%lf 的正弦是 %lf 度\n", x, ret); ret = cos(x*val); printf("%lf 的余弦是 %lf 度\n", x, ret); ret = tan(x*val); printf("%lf 的正切是 %lf 度\n", x, ret); return(0); }输出结果如下:
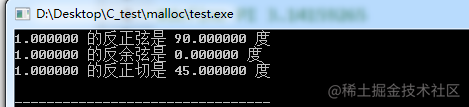
asin()、acos、atan 函数分别返回它们的参数的反正弦、反余弦、反正切值。功能刚好和 sin、cos、tan 函数相反。 sin() 是已知一个角的弧度值 x,求该角的正弦值 y;而 asin() 是已知一个角的正弦值 y,求该角的弧度值 x。x 的取值必须位于区间 [-1, 1] 中,如果 x 的值超出此区间,将会产生错误。 测试代码如下: #include #include #define PI 3.14159265 int main () { double x, ret, val; x = 1.0; val = 180.0 / PI; ret = asin(x) * val; printf("%lf 的反正弦是 %lf 度\n", x, ret); ret =acos(x) * val; printf("%lf 的反余弦是 %lf 度\n", x, ret); ret = atan(x) * val; printf("%lf 的反正切是 %lf 度\n", x, ret); return(0); }输出结果为:
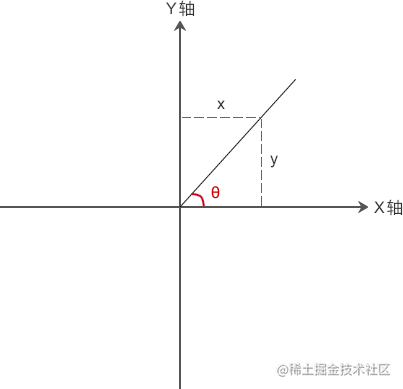
最后还有一个反正切函数atan2。atan2() 是 atan() 的增强版,能够确定角度所在的象限。它返回以弧度表示的 y/x 的反正切。y 和 x 的值的符号决定了正确的象限。 它的两个参数: x – 代表 x 轴坐标的浮点值。y – 代表 y 轴坐标的浮点值。弧度区间为 [-π,+π]。 当 (x, y) 在象限中时: 当 (x, y) 在第一象限,0 < θ < π/2当 (x, y) 在第二象限,π/2 < θ ≤ π当 (x, y) 在第三象限,-π < θ < -π/2当 (x, y) 在第四象限,-π/2 < θ < 0当 (x, y) 在象限的边界(也就是坐标轴)上时: 当 y 是 0,且 x 为非负值,θ = 0当 y 是 0,且 x 是负值,θ = π当 y 是正值,且 x 是 0,θ = π/2当 y 是负值,且 x 是 0,θ = -π/2
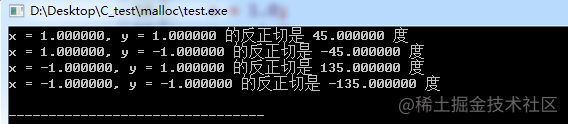
测试代码如下: #include #include #define PI 3.14159265 int main () { double x, y, ret, val; val = 180.0 / PI; x = 1.0; y = 1.0; ret = atan2 (y,x) * val; printf("x = %lf, y = %lf 的反正切", x, y); printf("是 %lf 度\n", ret); x = 1.0; y = -1.0; ret = atan2 (y,x) * val; printf("x = %lf, y = %lf 的反正切", x, y); printf("是 %lf 度\n", ret); x = -1.0; y = 1.0; ret = atan2 (y,x) * val; printf("x = %lf, y = %lf 的反正切", x, y); printf("是 %lf 度\n", ret); x = -1.0; y = -1.0; ret = atan2 (y,x) * val; printf("x = %lf, y = %lf 的反正切", x, y); printf("是 %lf 度\n", ret); return(0); }输出结果如下:
|
【本文地址】