| 传感器实验报告 | 您所在的位置:网站首页 › 光纤传感器测距实验 › 传感器实验报告 |
传感器实验报告
|
传感器实验报告
时间:2024.7.1
实验三十一 光纤传感器测量振动实验 一、实验目的:了解光纤位移传感器动态特性。 二、基本原理:利用光纤位移传感器的位移特性,配以合适的测量电路即可测量振动。 三、需用器件与单元:光纤位移传感器、光纤位移传感器实验模板、振动梁(2000型)或振动测量控制仪(9000型)、检波/滤波/低通实验模板、数显频率/转速表。 四、实验步骤: 1、将光纤传感器按图3-5安装在振动台上,并用手按压振动台,不能使差动变压器的活动杆有卡死的现象,否则必须调整安装位置,光纤探头对准振动台的反射面。
2、根据实验三十的结果,找出前坡或后坡的线性段中点,通过调节安装支架高度将光纤探头与振动台台面的距离调整在线性段中点(大致目测)。 3、在图9-2中V01与低通滤波器模板VI相接,低通输出V0接到示波器。 4、在振动源上接入低频振动信号(2000型),将频率选择在6-10HZ左右,逐步增大输出幅度,注意不能使振动台面碰到传感器,观察示波器的信号波形。保持振动幅度不变,改变振动频率观察示波器的信号波形。 答:示波器的信号波形是正弦波,当逐步增大输出幅度时,示波器的信号波形的幅度也是逐渐的增大,与输出幅度成正比。当保持振动的幅度不变时,改变振动频率发现示波器的信号波形频率逐渐的变小。 5、根据实验三十的数据,计算出梁的振动幅度有多大? 答:由前波的位移特性图可以知道,梁的振动幅度满足正弦波,其电压幅度ΔV=6.68-0.03v=6.65v,由前波的拟合直线y=3.1022x-12.934可得,梁的振动幅度:ΔX=(ΔV+12.934)/3.1022=6.313mm.。 五、思考题:试分析电容式、电涡流、光纤三种传器测量振动时的特点? 答:电容式测量振动时实际上是变极距差动电容式位移传感器,通过改变电容值来表征振幅的变化,其可以测量微位移。 电涡流测量振动频率高于固有频率的振动,他是通过在振动过程中产生的感应电流即涡流,在涡流里产生的交变磁场中产生的感应电压,其灵敏度低。 光纤传感器测量振动时,光纤本身只起到传光的作用。 实验三十二 光纤传感器测量转速实验 一、实验目的:了解光纤位移传感器用于测量转速的方法。 二、基本原理:利用光纤位移传感器在被测物的反射光强弱明显变化时所产生的相应信号,经电路处理转换成相应的脉冲信号即可测量转速。 三、需用器件与单元:光纤传感器、光纤传感器实验模板、直流源±15V、转动源(2000型)或转动测量控制仪(9000型)。 四、实验步骤: 1、将光纤传感器按实验三十一图3-5装于传感器支架上,使光纤探头与电机转盘平台上的反射点对准。 2、按图9-2接线,将光纤传感器实验模板输出V01与数显电压表VI端相接,接上实验模板上±15V电源,数显电压表置2V档,并按以下步骤操作:①用手转动圆盘,使探头避开反射面,合上主控箱电源开关,调节RW使数显表显示接近零(≥0)。②再用手转动圆盘,使光纤探头对准反射点,调节升降支架高低,使数显表指示最大,重复①、②步骤,直至两者的电压差值最大(差值需大于1V)。再将V01与转速/频率表的fin端相接,频率/转速表开关拨到转速档。 3、接入+2V—+24V直流电压至旋转电机,调节转速旋钮,使电机转动,逐渐加大转速电压,使电机转速加快,固定某一转速记下数显表上读数。 答:固定在2135转/分时的数显表读数为14.58V。 注:最高转速请不要超过2400转/分,否则光纤探头的动态响应范围可能会不够。 五、思考题: 1、测量转速时转速盘上反射点的多少与测速精度有否影响? 答:测量转速时转速盘上反射点的多少与测速精度有影响,反射点越少,测数精度越低。 2、 你可以用实验来验证一下转盘上仅一个反射点的情况吗? 答:计算在1分钟时间内的脉冲数是否与转速相等,如果相等,则转盘上仅有一个反射点。 压力检测实验 一、实验目的 1. 掌握压力检测模块组成结构与原理; 2. 掌握A/D、D/A转换的实现方法; 3. 掌握多控制器实现压力检测的基本方法; 4. 熟悉触摸屏作显示用的实现方法; 5. 了解将压力转换成重量的计算方法及软件实现。 二、实验设备 综合实验平台箱 一台 简易电子称 一台 导线若干 三、实验原理 该实验系统原理框图如图1所示。它主要用于对称重模型电子称砝码进行压力检测并显示重量。首先,通过触摸屏的控制界面,可以为系统设定一个重量值,另一方面通过A/D芯片采集压力信号,转换后送给控制器,由控制器处理变为重量值,经串口通信后在触摸屏显示窗口显示,同时显示的还有重量曲线及误差率。 
图1 压力检测系统原理图 四、实验步骤 1. 完成硬件连接,将A/D转换模块的跳线连接到检测板的接口P7。检测板上的接口P3接单片机板的接口JPWR,通过连接线单片机板给检测板供电。检测板上的接口P6接单片机的IO口JP9,P6的1脚接JP9的P3.7,其余脚依次。 接口P16为触摸屏接入检测板的接口,连接好。电源线DC5V接检测板上接口JP给触摸屏供电。检测板上接口J2为液晶屏的串口,将其与单片机的串口通过串口线连接。 2.给单片机供上电, 打开单片机编译环境Keil C,导入程序并编译,用程序烧写软件将其.hex文件下载到单片机。 3. 在触摸屏选择界面选电子秤测量系统,点进去后,进入电子秤测量系统参数设定,选择相应的电子秤序号和使用的控制器,点击确定进入下一界面,右下位置会显示控制器为单片机。在输入框中输入将放在电子秤秤盘上的砝码重量,然后点击开始按钮。观察触摸屏显示窗口上的显示曲线及左下角显示的误差率,记录现象及数值。 4.把电源关掉,并把到单片机的连接线都断开,然后才能进行下一步的实验。 第二篇:电阻应变式传感器 实验报告大连理工大学 
大学物理实验报告 院(系) 材料学院 专业 材料物理 班级 0705 姓 名 童凌炜 学号 200767025 实验台号 实验时间 2009 年 03 月 06 日,第二 周,星期 五 第 5-6 节 实验名称 电阻应变式传感器 教师评语 实验目的与要求: 1. 学习电阻应变式传感器的基本原理、 结构、 特性和使用方法 2. 测量比较几种应变式转换电路的输出特性和灵敏度 3. 了解温度变化对应变测试系统的影响和温度补偿方法 主要仪器设备: CSY10A型传感器系统实验仪 实验原理和内容: 1. 应变效应 导体或半导体在外力的作用下发生机械变形时, 其阻值也会发生相应的变化, 成为应变效应。 电阻应变片的工作原理即是基于这种效应, 将本身受力形变时发生的阻值变化通过测量电路转换为可使用的电压变化等以提供相关力的大小。 金属丝的电阻应变量可由以下算式表达: 金属丝的原始电阻值为
2. 电阻式应变传感器的测量电路 转换电路的作用是将电阻变化转换成电压或电流输出, 电阻应变式传感器中常用的是桥式电路, 本实验使用直流电桥。 驳接阻抗极高的仪器时, 认为电桥的输出端断路, 只输出电压信号; 根据电桥的平衡原理, 只有当电桥上的应变电阻发生阻值变化时, 电压信号即发生变化; 电桥的灵敏度定义为 步骤与操作方法: 1. 2. 箔式单臂、 半桥、 全桥电路的性能比较 基本操作过程与实验1相同, 其中连接电路部分分别使用上下梁的两个应变片, 以构成半桥; 或者全部使用应变片以构成全桥。 并进行实验, 记录数据。 在同一坐标上画出三种桥路的x-V曲线, 并进行灵敏度的比较。 3. 箔式应变片的温度效应及应变电路的温度补偿 3.1 参照实验1的步骤, 将差动器的部件调零 3.2 参照实验1的电路连接所用的元件, 并将差分放大器的输出端接毫伏表, 将P-N结温度传感器接入传感端, Vt接数字电压表。 数字电压表置于2V档, 显示环境的绝对温度。 3.3 开启仪器的电源并预热数分钟。 调整电桥的Wd电位器, 使测试系统的输出为零, 并记录此时的温度T。 3.4 开启加热器电源, 观察输出电压随温度上升所发生的变化, 并记录多组数据, 计算温度漂移ΔV/ΔT。 3.5 将R4换成与应变片处于同一个应变梁上的补偿片, 重复以上实验数据, 计算新的温度漂移并与之前的进行比较。 4. 5. 相关注意事项 5.1 在进行先向上再向下的位移操作中, 易产生零点漂移; 计算式可以将正负两个方向的Δx分开计算灵敏度以后再取平均得到。 数据记录与处理: 单臂电桥数据 起始位置 X0=10.950mm 
半桥数据 起始位置 X0=10.950mm 
结果与分析: 将单臂电桥和半桥的数据绘制成坐标散点图, 并且拟合出直线, 如上图所示: 根据图中所添加的拟合直线, 在直线上取样计算斜率, 可以得到以下四个斜率, 表现为各自的灵敏度: 使用MLS, 测量电路的灵敏度kv=ΔV/Δx= 负向形变, 单臂电桥 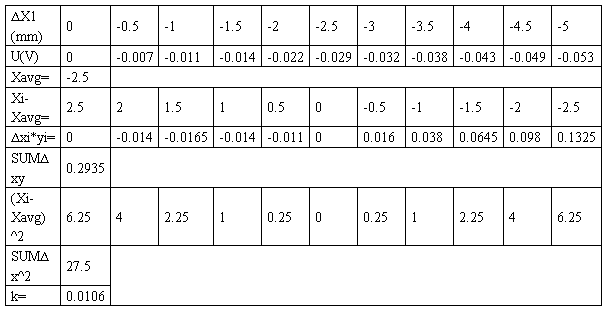
正向形变, 单臂电桥 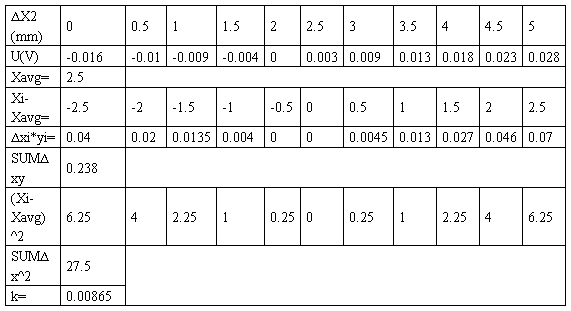
负向形变, 半桥 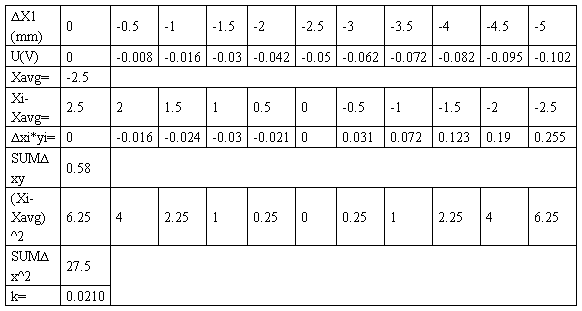
正向形变, 半桥 
综合以上四个计算结果来看: 单位: V/mm 
从实验数据中得到的结果可见, 半桥电路的灵敏度比单臂电桥的灵敏度的两倍还要高一些 kv2=0.0229>2*kv1=0.01824, 这与理论计算上的kv2=2*kv1不相同, 而半桥的灵敏度是严格等于0.5U的, 说明实际上单臂电桥测量电路存在温度漂移和非线性误差, 导致其实际的灵敏度要低于0.25U, 原因是应变电阻的变化量相比于固定电阻的阻值不可以被忽略。 讨论、建议与质疑: 1. 电阻应变片的工作原理是利用了金属的应变效应, 即金属材料在外力作用下发生机械变形时, 其阻值也要发生相应的变化。 电阻应变片的灵敏系数是电阻应变值关于形变量的表达式中的一个系数, 其物理意义是单位应变量引起的电阻值相对变化的大小, 灵敏系数与金属材料的几何尺寸变化, 以及材料本身的特性都有关系。 半导体材料相比于金属材料, 前者主要以圧阻效应为主, 即电阻产生变化的原因是由于应变引起能带的变形, 从而使能带中的载流子发生变化, 导致电阻率的变化, 因此能够反映出细微的变化, 从而具有高于金属材料的灵敏系数。 2. 单臂电桥, 半桥, 全桥电路的共同点是应用了不平衡电桥的特点, 将阻值的变化转换为电桥中的电压输出, 再通过相关的转换测量电路, 将电压信号转换为便于使用的物理值。 三种桥式电路的不同点是所含有的应变片的数量, 分别为一片, 两片和四片。 由于增加了应变片, 使得某一个桥臂上的电阻变化量能够消去其中微小不确定量, 从而使得桥式测量电路的灵敏度得到很大的提升。 3. 导致应变片阻值变化的因素有外力导致的应变片形变, 和外界温度的影响。 对测量桥路进行温度补偿的方法是, 将电桥上与电阻应变片同侧的固定电阻换成相同阻值, 同种材料性质, 但是受力应变方向相互垂直的应变片; 在这种情况下, 温度变化对两个应变片的影响效果相同, 从而保证了电桥两边的平衡状态(或理论的非平衡状态), 消除了温度带来的影响。 4. 在对应变效应的表达式推导中, 得到这样的结论 5. 关于本实验的建议: 在实验操作中, 发现有以下两点可改进之处: 5.1 实验电路的连接很不方便, 因为仪器的制造者将电桥中的电路整合到了其他部分, 从而导致操作中不能形象的将电桥电路转换成实际的连接电路, 建议将固定电阻排列在一个候选面板上, 同时将电桥电路事先做成一个与电路图形状类似的接口网络, 方便操作者的理解, 从而迅速接对电路。 5.2 电桥电路的调零很不方便, Wd的调零旋钮太小太灵敏, 建议参照电位差计的制作方法, 将调零按钮做大一些, 或者加上棘轮, 使其旋动时有刻度感, 方便调零操作。 更多相关推荐: 传感器实验报告传感器技术实验报告实验二实验七实验十三实验十九目录电阻应变式传感器实验热电式传感器热电偶霍尔式传感器的直流激励特性电容式传感器特性传感器技术实验16实验二电阻应变式传感器实验一实验目的1熟悉电阻应变式传感器在位... 传感器实验报告传感器实验报告实验一金属箔式应变片单臂电桥性能实验一实验目的了解金属箔式应变片的应变效应单臂电桥工作原理和性能二基本原理电阻丝在外力作用下发生机械变形时其电阻值发生变化这就是电阻应变效应描述电阻应变效应的关系式... 传感器实验报告1实验一金属箔氏应变片:单臂、半桥比较一、实验目的:验证单臂、半桥的性能及相互之间关系。二、实验步骤:(1)将差动放大器调零:用连线将差动放大器的正(+)、负(-)、地短接。将差动放大器的输出端与F/V表的输入插… 传感器实验报告电气与信息工程学院实验室实验报告某某大学综合性设计性实验报告实验项目名称所属课程名称传感器工程实践实验日期班级学号姓名成绩1电气与信息工程学院实验室实验报告电气与信息工程学院实验室2电气与信息工程学院实验室实验... 自动化传感器实验报告九 电容式传感器的位移特性实验广东技术师范学院实验报告学院自动化专业自动化姓名实验地点学号实验日期班级08自动化组别成绩组员指导教师签名实验九项目名称电容式传感器的位移特性实验一实验目的了解电容式传感器结构及其特点二基本原理利用平板电容Cs... 传感器实验报告第一次实验做实验一金属箔式应变计性能应变电桥实验二金属箔式应变计三种桥路性能比较第二次实验做实验十四电感式传感器差动变压器性能实验十五差动变压器零残电压的补偿第三次实验实验二十五电容式传感器性能第四次实验实验二... 传感器实验报告(给学生8课时)一实验目的1熟悉电阻应变式传感器在位移测量中的应用2比较单臂电桥双臂电桥和双差动全桥式电阻应变式传感器的灵敏度3比较半导体应变式传感器和金属电阻应变式传感器的灵敏度4通过实验熟悉和了解电阻应变式传感器测量电路的... 自动化传感器实验报告一 金属箔式应变片——单臂电桥性能实验广东技术师范学院实验报告学院自动化专业自动化姓名实验地点学号实验日期班级08自动化组别成绩组员指导教师签名实验一项目名称金属箔式应变片单臂电桥性能实验一实验目的了解金属箔式应变片的应变效应单臂电桥工作原理和性能... 传感器测速实验报告(第一组)传感器测速实验报告院系:班级:小组:组员:日期:20##年4月20日实验二十霍尔转速传感器测速实验一、实验目的了解霍尔转速传感器的应用。二、基本原理利用霍尔效应表达式:UH=KHIB,当被测圆盘上装有N只磁性体… 传感器的使用实验报告陕科大附中物理实验报告 传感器实验报告实验七电容式传感器位移实验实验数据实验曲线系统灵敏度S10274mvcm在曲线的线性部分非线性误差498思考题试设计利用的变化测谷物湿度的传感器原理及结构并叙述一下在此设计中应考虑哪些因素解由于是测谷物的湿度的... 传感器实验二报告传感器与检测技术实验报告课程名称传感器与检测技术实验项目电抗型传感器实验实验地点专业班级学号姓名指导教师20xx年11月11日实验一差动变压器的性能实验一实验目的了解差动变压器的工作原理和特性二基本原理差动变压... 传感器实验报告(25篇) |

 , 收到轴向拉力时, 发生电阻值变化
, 收到轴向拉力时, 发生电阻值变化 , 变化比例的表达式为:
, 变化比例的表达式为: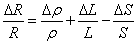 , 根据金属丝在力学和材料学上的相关性质, 在弹性范围内可以对公式进行改写, 得到
, 根据金属丝在力学和材料学上的相关性质, 在弹性范围内可以对公式进行改写, 得到 , 其中系数k称为电阻应变片的灵敏系数, 表示单位应变量引起的电阻值变化, 它与金属丝的几何尺寸变化和本身的材料特性有关; 一般半导体的灵敏系数要远大于金属的灵敏系数。 (由于受力会影响到半导体内部的载流子运动, 固可以非常灵敏地反映细微的变化)
, 其中系数k称为电阻应变片的灵敏系数, 表示单位应变量引起的电阻值变化, 它与金属丝的几何尺寸变化和本身的材料特性有关; 一般半导体的灵敏系数要远大于金属的灵敏系数。 (由于受力会影响到半导体内部的载流子运动, 固可以非常灵敏地反映细微的变化)
 根据电阻变化输入电桥的方法不同, 可以分为单臂、 半桥和全桥输入三种方式: 2.1 单臂电桥 只接入一个应变电阻片, 其余为固定电阻。 设电桥的桥臂比为
根据电阻变化输入电桥的方法不同, 可以分为单臂、 半桥和全桥输入三种方式: 2.1 单臂电桥 只接入一个应变电阻片, 其余为固定电阻。 设电桥的桥臂比为 , 根据电桥的工作原理, 并忽略一些极小的无影响的量, 可以得到输出电压的表达式为
, 根据电桥的工作原理, 并忽略一些极小的无影响的量, 可以得到输出电压的表达式为 , 同时得到单臂电桥灵敏度表达式
, 同时得到单臂电桥灵敏度表达式 单臂电桥的实际输出电压与电阻变化的关系是非线性的, 存在非线性误差, 故不常使用。 2.2 半桥 如图, 接入两个应变电阻和固定电阻, 设初始状态为R1=R2=R3=R4=R, ΔR1=ΔR2=ΔR, 可以得到电压表达式
单臂电桥的实际输出电压与电阻变化的关系是非线性的, 存在非线性误差, 故不常使用。 2.2 半桥 如图, 接入两个应变电阻和固定电阻, 设初始状态为R1=R2=R3=R4=R, ΔR1=ΔR2=ΔR, 可以得到电压表达式 , 半桥灵敏度表达式
, 半桥灵敏度表达式 , 可见输出电压与电阻的变化严格呈线性关系, 不存在线性误差, 灵敏度比单臂电桥提高了一倍。 2.3 全桥 全部电阻都使用应变电阻, 且相邻的两个臂的受力方向相反, 根据电桥性质可以得到电压及灵敏度的表达式
, 可见输出电压与电阻的变化严格呈线性关系, 不存在线性误差, 灵敏度比单臂电桥提高了一倍。 2.3 全桥 全部电阻都使用应变电阻, 且相邻的两个臂的受力方向相反, 根据电桥性质可以得到电压及灵敏度的表达式 ,
,  , 可见差动电桥的灵敏度比单臂电桥提高了4倍, 故广泛被使用。 补偿片的方法消除温度带来的漂移误差: 在单臂电桥中, 将与工作电阻同侧的固定电阻更换成相同受力方向的补偿片, 且原始电阻值相等; 这样在实际使用中, 由于温度造成的电阻值变化被抵消, 且补偿片不受力, 故可以消除电压的漂移输出。
, 可见差动电桥的灵敏度比单臂电桥提高了4倍, 故广泛被使用。 补偿片的方法消除温度带来的漂移误差: 在单臂电桥中, 将与工作电阻同侧的固定电阻更换成相同受力方向的补偿片, 且原始电阻值相等; 这样在实际使用中, 由于温度造成的电阻值变化被抵消, 且补偿片不受力, 故可以消除电压的漂移输出。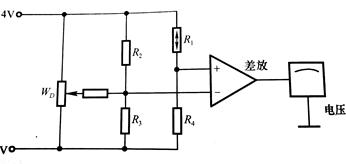 箔式单臂电桥的性能 1.1 差动放大器调零, 打开所用单元的电源开关, 差放器增益置于100倍, 并进行相关的其他调零处置。之后关闭电源 1.2 按照右侧的电路图连接实验所需的元件, 组成箔式单臂电桥电路。 1.3 调节悬臂梁头部铁心吸合的测微头, 使应变梁处以基本水平状态。 1.4 确定连线无误以后, 启动仪器电源并预热数分钟; 调整电桥Wd电位器, 使测试系统的输出为零。 1.5 旋动测微头, 带动悬臂梁分别向上和向下运动各5mm, 其中测微头每移动0.5mm记录一次差动放大器输出的电压值; 然后画出x-V曲线, 并计算桥路的灵敏度kv=ΔV/Δx
箔式单臂电桥的性能 1.1 差动放大器调零, 打开所用单元的电源开关, 差放器增益置于100倍, 并进行相关的其他调零处置。之后关闭电源 1.2 按照右侧的电路图连接实验所需的元件, 组成箔式单臂电桥电路。 1.3 调节悬臂梁头部铁心吸合的测微头, 使应变梁处以基本水平状态。 1.4 确定连线无误以后, 启动仪器电源并预热数分钟; 调整电桥Wd电位器, 使测试系统的输出为零。 1.5 旋动测微头, 带动悬臂梁分别向上和向下运动各5mm, 其中测微头每移动0.5mm记录一次差动放大器输出的电压值; 然后画出x-V曲线, 并计算桥路的灵敏度kv=ΔV/Δx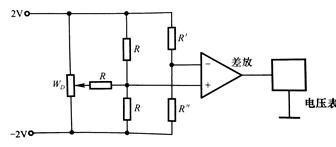
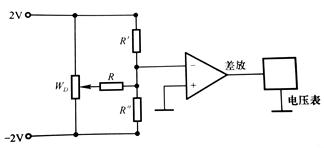 半导体单臂和半桥电路性能的比较 4.1 调零仪器, 并按照电路图连接电路, R’是半导体应变片, R’’是电桥上的固定电阻, 直流激励电源为±2V; 开启电源后预热数分钟。 4.2 调节应变梁处于基本水平状态, 调整电桥Wd电位器, 使测试系统输出为零。 4.3 旋动测微头, 以向上向下各5mm为限, 0.5mm为间隔记录数据x,V, 并作x-V曲线, 计算灵敏度 4.4 重新调整应变梁处于基本水平状态, 并重新调整输出为零。 用P-N结温度传感器测出系统的温漂。 4.5 按照电路图连接半导体半桥双臂电路, 半导体应变片处于同一桥侧, 重复以上实验步骤, 比较两种半导体桥路的灵敏度和温度漂移。
半导体单臂和半桥电路性能的比较 4.1 调零仪器, 并按照电路图连接电路, R’是半导体应变片, R’’是电桥上的固定电阻, 直流激励电源为±2V; 开启电源后预热数分钟。 4.2 调节应变梁处于基本水平状态, 调整电桥Wd电位器, 使测试系统输出为零。 4.3 旋动测微头, 以向上向下各5mm为限, 0.5mm为间隔记录数据x,V, 并作x-V曲线, 计算灵敏度 4.4 重新调整应变梁处于基本水平状态, 并重新调整输出为零。 用P-N结温度传感器测出系统的温漂。 4.5 按照电路图连接半导体半桥双臂电路, 半导体应变片处于同一桥侧, 重复以上实验步骤, 比较两种半导体桥路的灵敏度和温度漂移。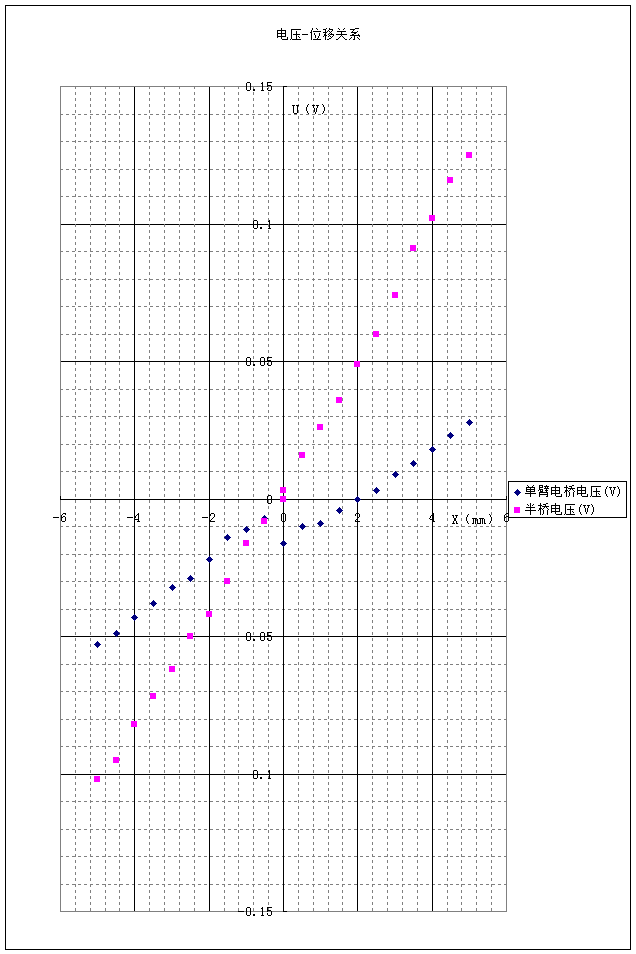
 ,
,【本文地址】