STM32读取MPU6050陀螺仪 |
您所在的位置:网站首页 › dmp_read_fifo › STM32读取MPU6050陀螺仪 |
STM32读取MPU6050陀螺仪
|
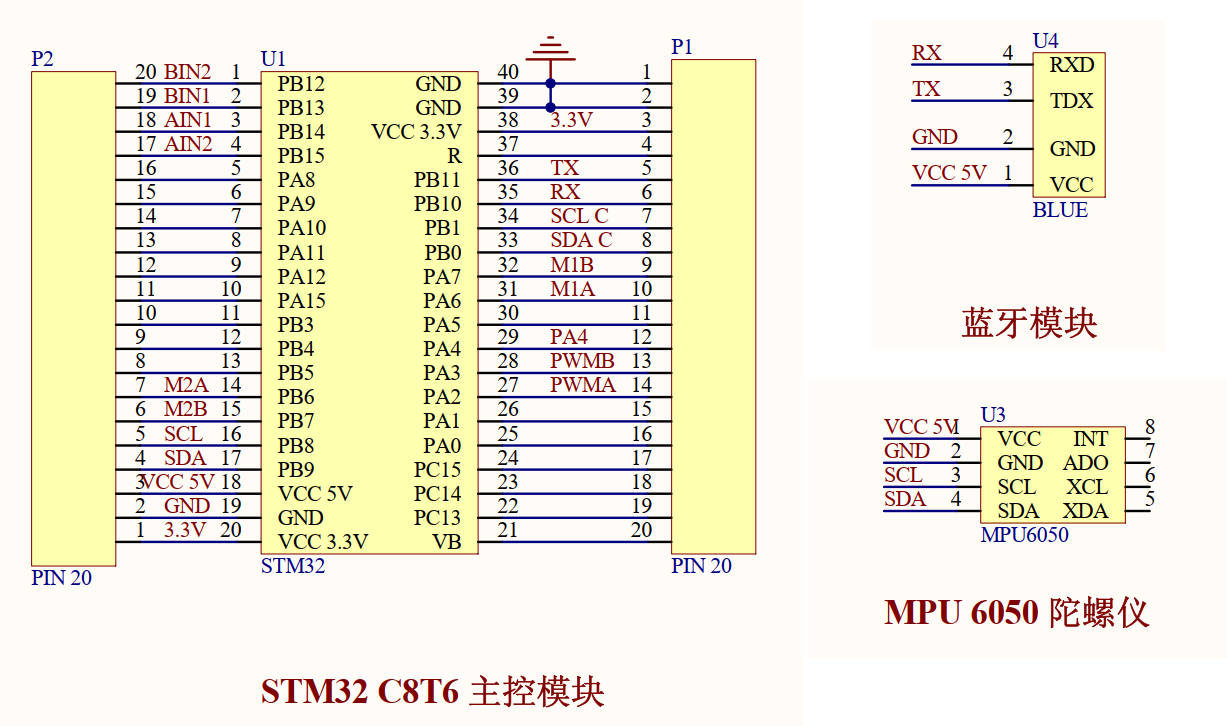
目录 一、硬件设计 1、模块说明 2、电气原理图 二、程序设计 1、工程创建 2、程序设计 (1)main程序 (2)IIC初始化 (3)串口1配置 (4)MPU6050初始化 (5)MPU6050角度状态获取 三、测试 四、工程下载连接 一、硬件设计 1、模块说明STM32芯片型号:STM32C8T6 陀螺仪:MPU6050,使用I²C和CPU通讯,通讯引脚PB8、PB9 串口1对外通讯:引脚PA9、PA10 串口3接蓝牙通讯:引脚PB10、PB11 2、电气原理图
硬件设备
创建程序工程对应型号的单片机,在工程中添加下列文件夹
在工程根目录下添加下来文件夹,文件夹中添加相应的配置文件。
模板工程创建可以参加教程:STM32笔记1-库函数模板工程创建_Big_潘大师的博客-CSDN博客_site:csdn.net 这里提供一个创建好的模板STM32F103C8(LED灯闪烁运行指示) https://download.csdn.net/download/panjinliang066333/86753318 User:用户程序,运行Main程序 App:各个功能块程序 Public:公用的程序 Startup:放置启动文件 StdPeriph_Driver:存储系统库文件 MPU DMP:陀螺仪库文件 2、程序设计 (1)main程序 #include "system.h" #include "SysTick.h" #include "SysDelay.h" #include "led.h" #include "i2c.h" #include "mpu6050.h" #include "usart.h" int main() { u8 count=0; u16 i=0; SystemInit(); //系统初始化 SysDelay_Init(72); //自定义延时函数初始化 LED_Init(); USART1_Config(); //串口1初始化 USART3_Config(); //串口3初始化-接蓝牙 i2cInit(); //IIC初始化 SysDelay_ms(10); //10毫秒延时 MPU6050_Init(); //MPU6050 DMP陀螺仪初始化 while(1) { //LED闪烁 if(i%500==0) { led1=!led1; } //2秒执行一次 if(i%2000==0) { count++; printf("count:%d \r\n",count); printf("Pitch: %.2f ,Roll: %.2f,Yaw: %.2f \r\n",Pitch,Roll,Yaw); //Pitch,Roll,Yaw数据串口传递 } /*获取MPU6050角度状态*/ //在串口数据发送之后执行 MPU6050_Pose(); //Pitch翻滚,Roll俯仰,Yaw偏航 SysDelay_ms(1); //1毫秒延时 i++; } } (2)IIC初始化 void i2cInit(void) { GPIO_InitTypeDef gpio; //ÒѸü¸Ä RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); gpio.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9; gpio.GPIO_Speed = GPIO_Speed_2MHz; gpio.GPIO_Mode = GPIO_Mode_Out_OD; GPIO_Init(GPIOB, &gpio); } (3)串口1配置 void USART1_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; // NVIC_InitTypeDef NVIC_InitStructure; /* config USART1 clock */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); /* USART1 GPIO config */ /* Configure USART1 Tx (PA.09) as alternate function push-pull */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure USART1 Rx (PA.10) as input floating */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStructure); /* USART1 mode config */ USART_InitStructure.USART_BaudRate = 115200; //USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No ; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_Cmd(USART1, ENABLE); } (4)MPU6050初始化 void MPU6050_Init(void) { int result=0; //IIC_Init(); result=mpu_init(); if(!result) { PrintChar("mpu initialization complete......\n "); //mpu initialization complete if(!mpu_set_sensors(INV_XYZ_GYRO | INV_XYZ_ACCEL)) //mpu_set_sensor PrintChar("mpu_set_sensor complete ......\n"); else PrintChar("mpu_set_sensor come across error ......\n"); if(!mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL)) //mpu_configure_fifo PrintChar("mpu_configure_fifo complete ......\n"); else PrintChar("mpu_configure_fifo come across error ......\n"); if(!mpu_set_sample_rate(DEFAULT_MPU_HZ)) //mpu_set_sample_rate PrintChar("mpu_set_sample_rate complete ......\n"); else PrintChar("mpu_set_sample_rate error ......\n"); if(!dmp_load_motion_driver_firmware()) //dmp_load_motion_driver_firmvare PrintChar("dmp_load_motion_driver_firmware complete ......\n"); else PrintChar("dmp_load_motion_driver_firmware come across error ......\n"); if(!dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation))) //dmp_set_orientation PrintChar("dmp_set_orientation complete ......\n"); else PrintChar("dmp_set_orientation come across error ......\n"); if(!dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT | DMP_FEATURE_TAP | DMP_FEATURE_ANDROID_ORIENT | DMP_FEATURE_SEND_RAW_ACCEL | DMP_FEATURE_SEND_CAL_GYRO | DMP_FEATURE_GYRO_CAL)) //dmp_enable_feature PrintChar("dmp_enable_feature complete ......\n"); else PrintChar("dmp_enable_feature come across error ......\n"); if(!dmp_set_fifo_rate(DEFAULT_MPU_HZ)) //dmp_set_fifo_rate PrintChar("dmp_set_fifo_rate complete ......\n"); else PrintChar("dmp_set_fifo_rate come across error ......\n"); run_self_test(); //自检 if(!mpu_set_dmp_state(1)) PrintChar("mpu_set_dmp_state complete ......\n"); else PrintChar("mpu_set_dmp_state come across error ......\n"); } } (5)MPU6050角度状态获取 void MPU6050_Pose(void) { dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors,&more); /* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units. * This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent. **/ /*if (sensors & INV_XYZ_GYRO ) send_packet(PACKET_TYPE_GYRO, gyro); if (sensors & INV_XYZ_ACCEL) send_packet(PACKET_TYPE_ACCEL, accel); */ /* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30. * The orientation is set by the scalar passed to dmp_set_orientation during initialization. **/ if(sensors & INV_WXYZ_QUAT ) { q0 = quat[0] / q30; q1 = quat[1] / q30; q2 = quat[2] / q30; q3 = quat[3] / q30; //Pitch翻滚,Roll俯仰,Yaw偏航 Pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch Roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)*57.3; // roll Yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw } } 三、测试打开串口调试助手,可以接收到单片机发送过来的数据,转动单片机板子可以发现YAW(偏航)数据发生变化。
四、工程下载连接 https://download.csdn.net/download/panjinliang066333/86753201 |




【本文地址】
公司简介
联系我们
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |