四轮轮毂电机驱动车辆直接横摆力矩控制(DYC),转矩矢量分配(TVC)的仿真搭建和控制 |
您所在的位置:网站首页 › LAS180-DYC › 四轮轮毂电机驱动车辆直接横摆力矩控制(DYC),转矩矢量分配(TVC)的仿真搭建和控制 |
四轮轮毂电机驱动车辆直接横摆力矩控制(DYC),转矩矢量分配(TVC)的仿真搭建和控制
|
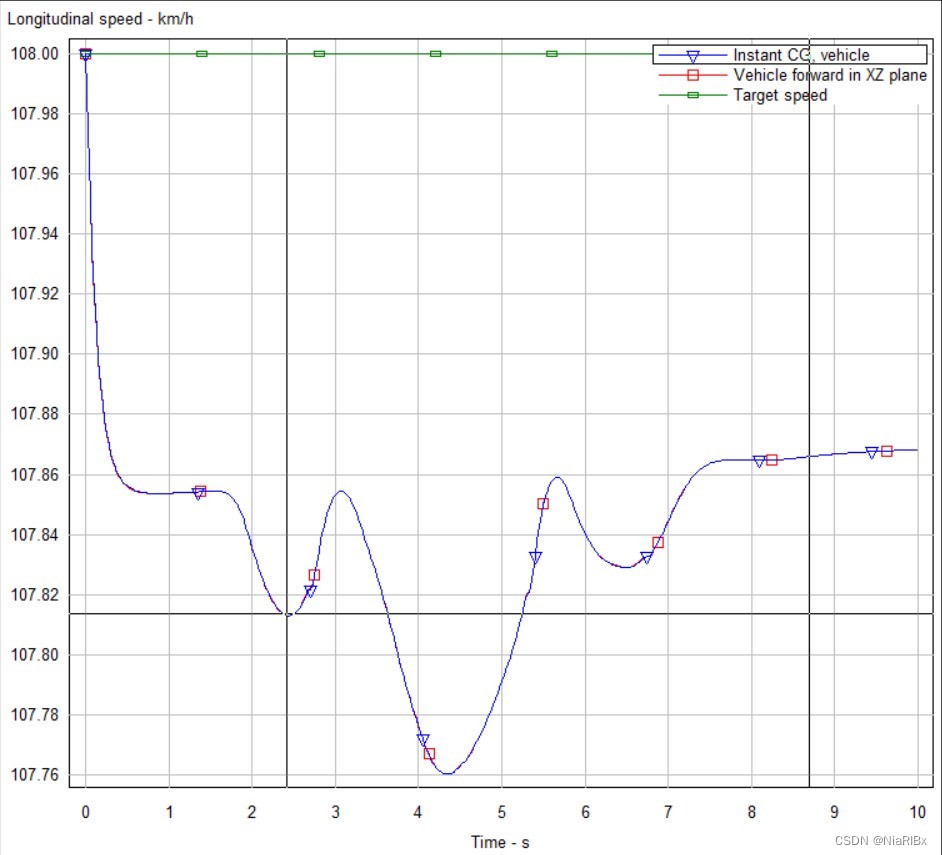
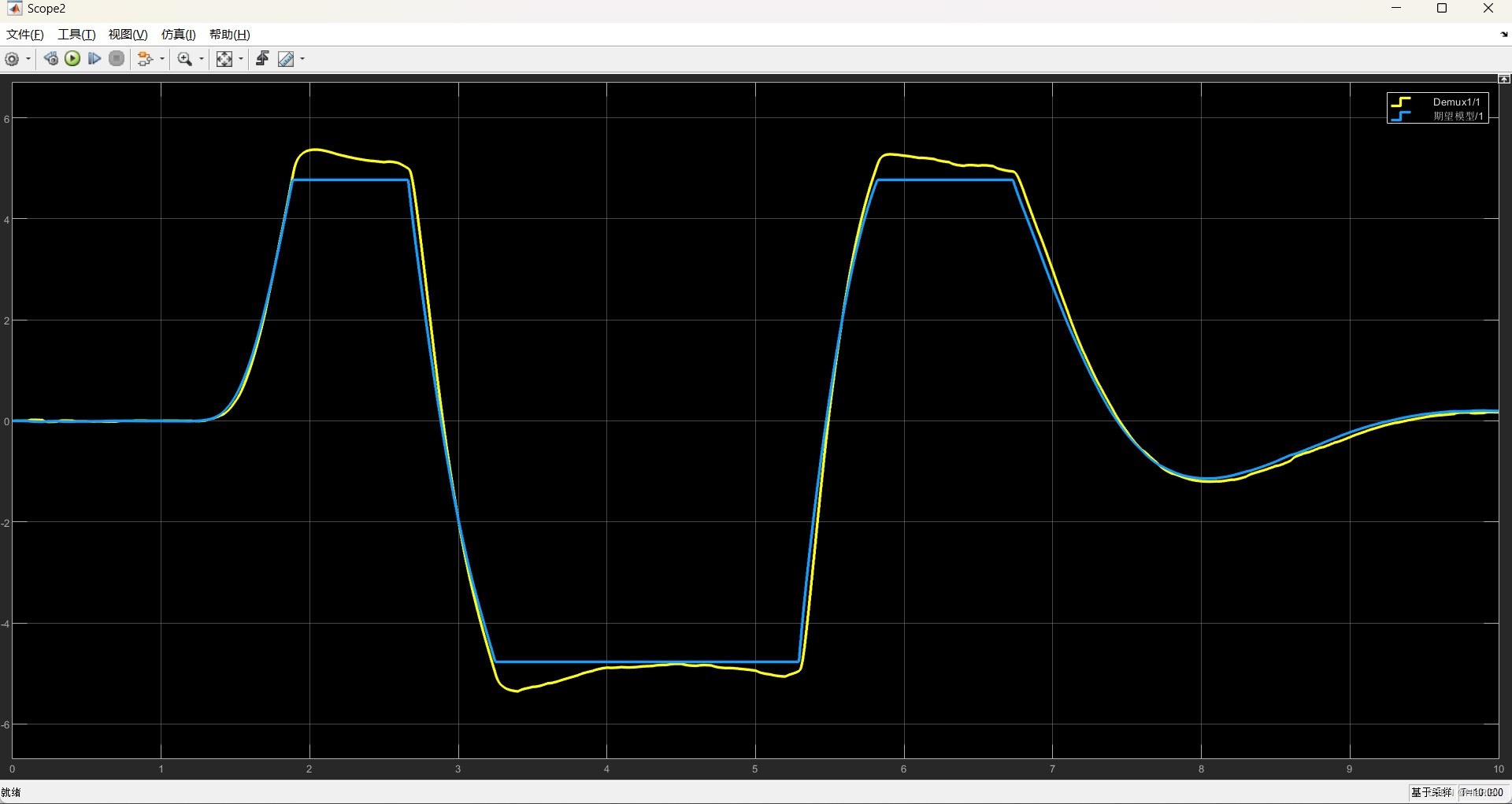
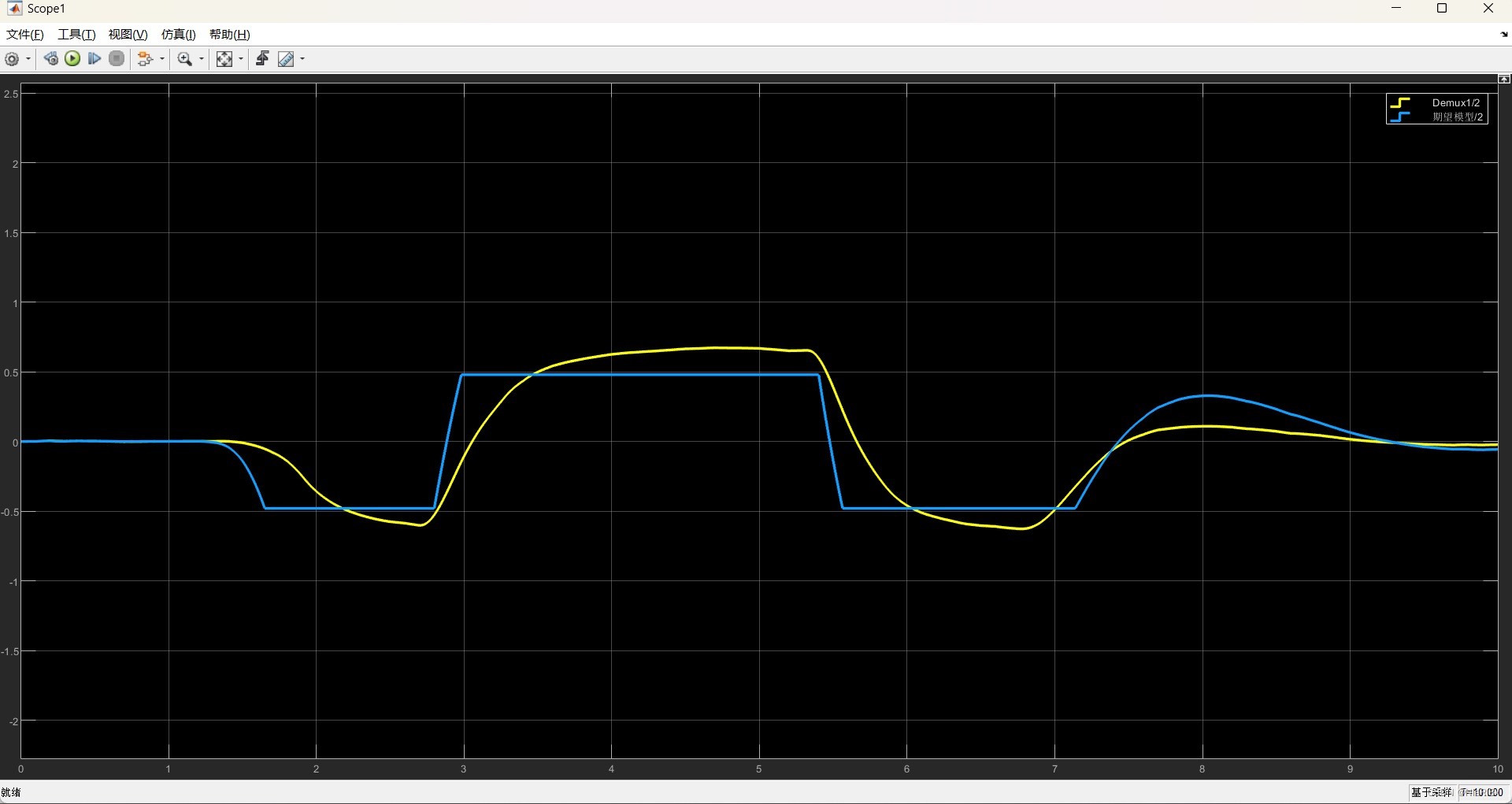
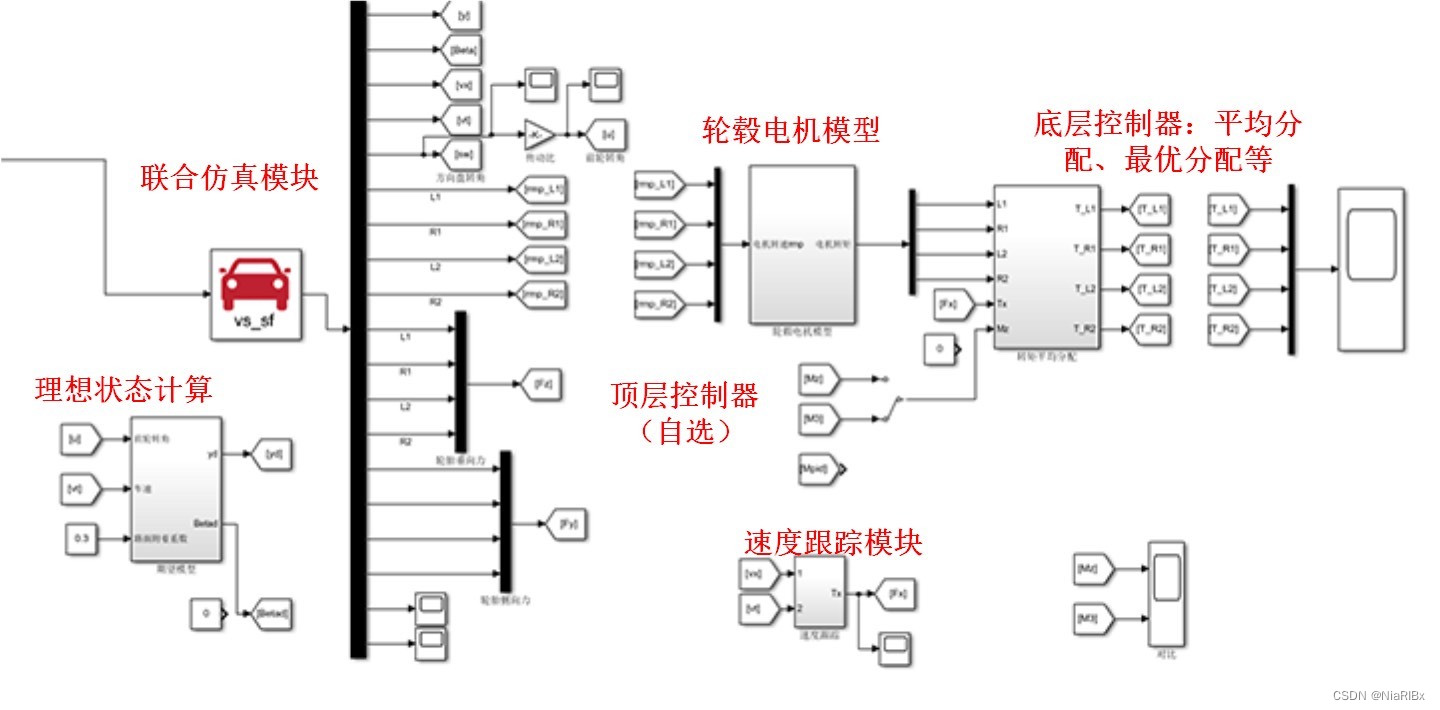
四轮轮毂电机驱动车辆直接横摆力矩控制(DYC),转矩矢量分配(TVC)的仿真搭建和控制 整体采用分层控制策略。 其中顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。 为了减少车辆速度影响,设计了纵向速度跟踪控制器;底层控制器的任务是对顶层控制器得到的期望附加横摆力矩以及驱动力进行分配,实现整车在高速地附着路面条件下的稳定性控制。 顶层控制器的控制方法包括:滑模控制(SMC)、LQR控制、PID控制、鲁棒控制(发其中一个,默认发滑模和pid控制器)等。 底层控制器的分配方法包括:平均分配、最优分配,可定制基于特殊目标函数优化的分配方法(默认发平均分配)。 说明:驾驶员模型采用CarSim自带的预瞄模型(Simulink驾驶员模型请单独拿后);速度跟踪可加可不加,采用的是PID速度跟踪控制器。 Simulink模型包括:理想状态计算模块、速度跟踪模块、轮毂电机模型、顶层控制器、底层控制器。 Simulink以及CarSim联合仿真进行验证,效果良好。 保证运行成功。
四轮轮毂电机驱动车辆直接横摆力矩控制(DYC),转矩矢量分配(TVC)是一种先进的车辆控制技术。本文将围绕该技术展开讨论,并介绍其仿真搭建和控制的方法。 首先,我们采用了分层控制策略。在这种策略下,车辆控制被分为顶层控制和底层控制两个层次。 顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。为了减少车辆速度的影响,我们设计了纵向速度跟踪控制器。通过该控制器,车辆能够根据期望速度自动调整纵向行驶状态,进一步提高稳定性。 底层控制器的任务是对顶层控制器得到的期望附加横摆力矩以及驱动力进行分配,以实现整车在高速附着路面条件下的稳定性控制。我们提供了多种底层控制方法供选择。其中包括平均分配、最优分配,以及可定制基于特殊目标函数优化的分配方法。用户可以根据实际需求选择适合的方法。 顶层控制器的控制方法包括滑模控制(SMC)、LQR控制、PID控制和鲁棒控制。这些方法都有其优势和适用场景。用户可以根据具体情况选择合适的控制方法。 Simulink模型用于对整个系统进行仿真验证。该模型包括理想状态计算模块、速度跟踪模块、轮毂电机模型、顶层控制器和底层控制器。通过与CarSim联合仿真,我们验证了该模型的有效性和性能。 需要注意的是,驾驶员模型采用了CarSim自带的预瞄模型。在速度跟踪方面,我们选择了PID速度跟踪控制器。这些选择是为了保证模型的准确性和稳定性。 总之,四轮轮毂电机驱动车辆直接横摆力矩控制和转矩矢量分配技术是一种先进的车辆控制方法。通过分层控制策略和合适的控制方法,可以实现车辆的稳定性控制。本文介绍了该技术的仿真搭建和控制方法,并通过Simulink和CarSim联合仿真进行了验证。该技术在实际应用中有着广泛的潜力,希望能为读者提供一些有益的启示和参考。 相关代码,程序地址:http://imgcs.cn/lanzoun/756394149520.html |
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |