VisionPro 常用工具介绍 |
您所在的位置:网站首页 › 各种工具的图片及名称 › VisionPro 常用工具介绍 |
VisionPro 常用工具介绍
|
VisionPro 常用工具介绍
所有工具大纲VisionPro 基础工具CogImageFileTool工具CogPMAlignTool工具CogCNLSearchTool工具(也是一种特征匹配工具)CogBlobTool工具CogCaliperTool工具CogPMAlignMultiTool工具CogDataAnalysisTool工具CogPMRedLineTool工具CogResultsAnalysisTool
标定工具CogCalibCheckerboardTool工具CogCalibImageCorrectorTool工具CogCalibNPointToNPointTool工具CogFixtureNPointToNPointTool工具
Creation(创建)工具CogCreateCircleTool工具CogCreateEllipseTool工具CogCreateGraphicLabelTool工具CogCreateLineBisectPointsTool工具CogCreateLineParallelTool工具CogCreateLinePerpendicularTool工具CogCreateLineTool工具CogCreateSegmentAvgSegsTool工具CogCreateSegmentTool工具
Finding和Fitting工具
所有工具大纲
CogImageFileTool工具可以用来将单张图片或idb格式的图片数据库读入内存,如图所示,可以作为没有相机时的其他工具的图片来源。 (1)功能介绍:训练一个图像 然后再在其他图像或者同一幅图像的其他位置去寻找该图像。在这个过程中你可以得到1.图像尺寸变化2. 角度变化 3.其他的综合因素。
CogCNLSearchTool通过在图像中查找和已训练的模型面积相似的区域来定位特征,如果是查找到单个特征,则说明面积最相似的区域具有全局相似性,其即为要查找的特征;如果是查找到多个特征,如果这些特征和已训练的面积有一定程度的接近,则说明这些位置的特征比其领域的特征与易训练模型的相似度大,具有局部相似性。 可以通过调节查找结果个数和接收阈值来确定局部特征相似度和个数。 另外介绍一下: CNLSearchTool有线性查找和非线性查找算法,在利用工具进行模型查找的时候首先进行算法选择。 线性查找算法: 线性查找算法适用于模型图像和查询图像之间有线性亮度变换的情况,如果设置为线性查找算法,CNLSearch对待查询图像中的和模型图像像素非常像素的地方进行查询,因为这种查询方式下,由于模型图像和查询图像之间的相似度由两者之间灰度关联系数决定,所以,这种方式又叫做光强关联查找算法。 非线性查找算法 非线性查找算法适用于模型图像和查询图像之间没有亮度变换的情况,这种算法的原理是通过判断模型图像与查询图像中边缘部分和非边缘部分的相似程度来确定模型,因为这种算法是通过查找边缘特征而非像素特征,所以这种算法对应亮度存在线性和非线性变换的场合都适用。 CogBlobTool工具利用 CogBlobTool 工具,可以检测和定位图像中某一灰度范围内的形状未知的特征,这个过程叫做 Blob 分析。通过 Blob 分析,可以为我们得到图像某一特征是否存在、数量、位置、形状、方向等信息。也可以利用Blob分析未发现图像中不同特征之间的拓扑关系. CogCaliperTool工具可用来测量物体的宽度,边缘或特征的位置,边对的位置及宽度等。与其他视觉工具不同的是,CogCaliperTool 工具需要预先知道待测边缘或特征的大概位置和特点。CogCaliperTool 的一个典型应用就是获取待测对象某一特征的精确位置。 (1)测宽度实例: 1.选择边缘对模式 2.设置极性方向:箭头方向为极性对应方向 3.运行后在结果位置可以看到测量结果 可以一次性匹配多个模板,然后输出多个匹配对象 (1)使用方法: 点击右上角新增,增加模板匹配,点进去以后界面和CogPMAlignTool差不多,然后训练好多组模板以后出来,点击右下角多次训练,然后如果所有模板看到可运行都是打勾的就表示训练完毕了。 CogDataAnalysisTool工具可以设定公差范围,来对其他视觉工具产生的数据进行逻辑判断,并可以进行统计分析。对于输入的每一个数据,都可以设定单独的阈值。如下图所示: 该功能在VisionPro里面需要权限,所以可以在C#里面去实现这个工具的一切功能。不建议在Visionpro里面调用工具。 CogPMRedLineTool工具CogPMRedLineTool 也是一个模型定位工具,和其他一些模型定位算法一样,其首先训练一个模型,然后在运行时图像上查询一个或多个已训练的模型,但是CogPMRedLineTool 不是基于像素栅格。它是基于形状的,在模型匹配中更加快速和准确。 利用CogResultsAnalysisTool工具可定义一个判断标准,以使ToolGroup或ToolBlock给出一个"Accept"、“Warn”、或者“Reject”的最终运行结果。这个工具只在QuickBuild使用,当没有编程接口,不能用再程序中。 相当于在TOOL里做运算,然后给出来一个结果(可能是布尔值也可能是double值等),其实这里面的功能可以在脚本里面实现,所以如果不擅长使用该工具,可以尝试在脚本里面去定义这些判断。 如图是一个例子: 在视觉应用中,通常测量和定位结果有实际意义,CogCalibCheckerboardTool通过标定板来建立像素坐标和实际坐标之间的2D转换关系,然后将这种坐标转换关系附加到实测图的坐标空间树种。因此,视觉工具便可输出视觉物理单位的测量结果。CogCalibCheckerboardTool可以使用的定位板有两种,一种是棋盘格标定板,一种是圆点标定板,如图所示,在标定的时候要首先获取标定板的图像,将其传递给CogCalibCheckerboardTool工具。 1)将标定板图像传递给CogCalibCheckerboardTool的Current.Inputimage; 2)点击"抓取校正图像",将待校正图像从Current.Inputimage传递给Current.CalibrationImage,如图所示; 3)选择不同的校正工具,比如棋盘格或者详尽棋盘格等,然后点击“计算校正”,查看校正结果。 4)运行工具,生产校正空间。 CogCalibImageCorrectorTool工具用于校准图像,暂时没找到相关介绍。从工具使用上来看是对输入图像进行一个整体的校正。 CogCalibNPointToNPointTool工具ogCalibNPointToNPointTool工具两组点来校正图像,一组点为像素坐标点,另一组点是像素坐标点对应的物理坐标点,此工具用这两组点计算一个最佳的2D转换,并将此2D转换保存工具中,在此工具运行的时候将此2D转换添加到输入图像的坐标空间树中,并输出校正后的图像。 CogCalibNPointToNPointTool使用步骤 CogCalibNPointToNPointTool工具的使用可以分为以下几步: 1)通过CogPMAlignTool工具或CogBlobTool工具等工具获取图像中的坐标点; 2)将像素坐标点和其对应的物理坐标点传递给工具,如图所示; 3)设置坐标原点。 CogFixtureNPointToNPoint可以利用两组点来建立定位坐标系,其中一组点来自非定位坐标系,一般用像素坐标点表示这些像素坐标点的获取是通过其他视觉工具,另一组点的来源有两种方式,一种是通过基准图像方式获取,另一种是通过几何测量获取。根据定位坐标点来源的不同,可以将此工具的定位方式分为基准定位和几何定位两种。 创建工具就是通过自定义参数创建一些想要的变量值输出到终端 CogCreateCircleTool工具CogCreateCircleTool能够根据提供的圆形坐标、半径等信息在图像找那个创建一个圆,并将创建的圆在终端输出。作用就是在输出里面得到自己想要的circle变量。 CogCreateEllipseTool工具能够根据提供的中心点坐标、长半轴、短半轴、旋转角度等新创建一个椭圆,并将所创建的椭圆在终端输出。作用就是在输出里面得到自己想要的Ellipse变量。 根据输入对象的不同,以及调整各项参数可以在输出图像上生成一个标签项。该工具常在脚本里面使用,用于显示最终结果。 顾名思义就是通过两个线平分点来创建直线变量,如图所示 顾名思义可以通过一个点和一个line变量创建一个新的line变量,如图所示。 通过一个点和一条线来创建垂直直线如图所示
和Fitline要做个区分,Createline是通过一个点和旋转度来创建一个line变量的。 用两个线段X1,X2创造一个完全是这两个线段平均值的线段X0 即: 起点坐标X0=(X1+X2)/2 终点坐标X0=(X1+X2)/2 旋转度X0=(X1+X2)/2 如图所示 用起点和终点创造一条线段
|


 (2)图像:主要有输入图像 训练图像 和 最后输出图像 (3)选择模板区域的方式有两种: 1.直接框选,在区域训练和原点里面直接加选择图像框选想要匹配的对象(适合背景干扰较少的图像) 2.是区域掩膜(适合背景有干扰的图像),在框选区域里面再筛选不需要的部分进行掩膜,增加准确度。如下图所示,掩膜内部黑色框后,搜索只会找外部白色大框
(2)图像:主要有输入图像 训练图像 和 最后输出图像 (3)选择模板区域的方式有两种: 1.直接框选,在区域训练和原点里面直接加选择图像框选想要匹配的对象(适合背景干扰较少的图像) 2.是区域掩膜(适合背景有干扰的图像),在框选区域里面再筛选不需要的部分进行掩膜,增加准确度。如下图所示,掩膜内部黑色框后,搜索只会找外部白色大框  但是不淹膜的话,这些地方都会去搜索。
但是不淹膜的话,这些地方都会去搜索。  (4)搜索区域介绍
(4)搜索区域介绍  (5)各种运行参数介绍 主要有限制匹配得分、角度范围、缩放范围等 1.查找概数:指定结果总数,可能有时一个图里面要匹配出多个模板,这个概述就要改变。 2.接受阈值:指定结果分数的接受阈值。仅接受分数大于或等于此值的结果 3.计分时考虑杂斑:仅适用于Patmax,如果选中,背景噪音以及杂点会拉低得分,否则得分会忽略背景干扰而升高 4.角度和缩放上下限制:尽量不使用标称值改变,而用上下限制决定搜索对象的可接受范围,这边的角度尽量调整为-180~180度。
(5)各种运行参数介绍 主要有限制匹配得分、角度范围、缩放范围等 1.查找概数:指定结果总数,可能有时一个图里面要匹配出多个模板,这个概述就要改变。 2.接受阈值:指定结果分数的接受阈值。仅接受分数大于或等于此值的结果 3.计分时考虑杂斑:仅适用于Patmax,如果选中,背景噪音以及杂点会拉低得分,否则得分会忽略背景干扰而升高 4.角度和缩放上下限制:尽量不使用标称值改变,而用上下限制决定搜索对象的可接受范围,这边的角度尽量调整为-180~180度。 可以把找到特征的XY输出到CogFixtureTool来寻找坐标系。
可以把找到特征的XY输出到CogFixtureTool来寻找坐标系。 1.点击查看各种模式选用的介绍,常见使用硬阈值(动态)可以自动调节阈值范围,或者选用硬阈值(相对)从而防止亮度的干扰 2.极性:根据选择范围对象颜色判断,如选中圈为白色对象则选用黑底白点。 3.高低尾部:可以有效剔除柱状图两端的噪音像素。观察灰度值图片来确定尾部位置 4.最重要的是测得尺寸框,可以通过对各种属性的限制去排除一些误差对象。
1.点击查看各种模式选用的介绍,常见使用硬阈值(动态)可以自动调节阈值范围,或者选用硬阈值(相对)从而防止亮度的干扰 2.极性:根据选择范围对象颜色判断,如选中圈为白色对象则选用黑底白点。 3.高低尾部:可以有效剔除柱状图两端的噪音像素。观察灰度值图片来确定尾部位置 4.最重要的是测得尺寸框,可以通过对各种属性的限制去排除一些误差对象。 

 其中: 1.对比度阈值是对比阀值 消除不满足最低对比度的边线(峰值高度或者深度) 即小于对比度阈值的边会被忽略,大于对比度阈值的边会被保留
其中: 1.对比度阈值是对比阀值 消除不满足最低对比度的边线(峰值高度或者深度) 即小于对比度阈值的边会被忽略,大于对比度阈值的边会被保留  2.过滤一半像素:此参数主要用于边缘筛选,其目的是消除噪声和增强峰值 3.最大结果数:在当前卡尺范围内可以得到多少组结果宽度,或者说想得到多少组结果。
2.过滤一半像素:此参数主要用于边缘筛选,其目的是消除噪声和增强峰值 3.最大结果数:在当前卡尺范围内可以得到多少组结果宽度,或者说想得到多少组结果。 注意:多个模板匹配要用多个查找概述,不然只会输出一个匹配对象
注意:多个模板匹配要用多个查找概述,不然只会输出一个匹配对象 拒绝的参数会显示出拒绝状态。
拒绝的参数会显示出拒绝状态。 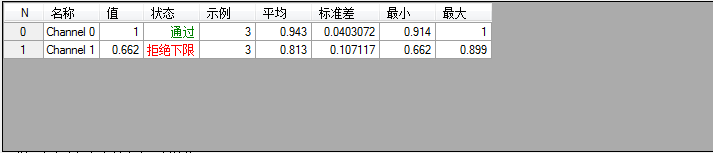

 注意要使用里面的输出需要在输出那个地方打勾才可以在输出的地方看到输出对象。
注意要使用里面的输出需要在输出那个地方打勾才可以在输出的地方看到输出对象。 CogCalibCheckerboardTool进行视觉标定的步骤
CogCalibCheckerboardTool进行视觉标定的步骤


 ## CogFixtureTool工具 CogFixtureTool是另一种建立定位坐标系的工具,也是最长用的,在使用此工具建立定位坐标系之前,需要提前获得一个2D转换关系,2D转换关系的通过其他工具获取,其主要任务: 1)一个往坐标空间树种添加一个定位坐标系,需设定定位坐标系的名称; 2)建立一个定位后的输出图像提供其他工具调用,输出图像的像素和输入图像完全相同,但坐标空间可以选择为定位空间或者非定位空间。
## CogFixtureTool工具 CogFixtureTool是另一种建立定位坐标系的工具,也是最长用的,在使用此工具建立定位坐标系之前,需要提前获得一个2D转换关系,2D转换关系的通过其他工具获取,其主要任务: 1)一个往坐标空间树种添加一个定位坐标系,需设定定位坐标系的名称; 2)建立一个定位后的输出图像提供其他工具调用,输出图像的像素和输入图像完全相同,但坐标空间可以选择为定位空间或者非定位空间。  使用方法: 1)可以直接搭配PMAlignTool使用 2)也可以输入新的坐标系的X,Y,W进行建立。
使用方法: 1)可以直接搭配PMAlignTool使用 2)也可以输入新的坐标系的X,Y,W进行建立。









【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |