| [有限元分析:结构力学仿真第三步 | 您所在的位置:网站首页 › 平面网格划分分类依据 › [有限元分析:结构力学仿真第三步 |
[有限元分析:结构力学仿真第三步
|
网格是有限元仿真的基础,网格类型是否合适、网格密度是否恰当、网格质量的好坏都将直接影响仿真结果精度。 网格划分几乎是所有CAE仿真初学者学习的第一步,笔者当年研一时首先学习的就是网格划分,很多应届生毕业入职有限元工程师前半年甚至一年的主要工作就是网格划分,虽然枯燥,但其一网格划分是有限元仿真基础,是仿真工程师必备技能,其实仿真分析工程师大部分时间都是划网格,有点费眼睛 ;其二网格划分其实也是了解产品结构的过程,要想做好仿真,了解产品结构也非常重要。 下面将分为结构仿真常见网格类型介绍、如何选择合适的网格类型、网格尺寸及质量标准、各行业常用网格类型以及学习资料介绍五个部分介绍网格划分相关知识。 一、常见网格类型介绍结构有限元仿真分析中常用一维、二维和三维网格来模拟结构,但现实世界中只有三维实体,没有一维和二维结构,严格来说只需要三维实体网格就可以模拟所有结构。 为什么需要一维和二维网格呢?因为现实世界的结构是无限复杂的,如果全部使用实体网格,需要的网格数量非常大,以目前的计算能力无法在可接受的时间内求解出满足精度要求的结果,我们要尽可能将结构简化为满足精度要求且能快速求解的仿真分析模型。 1.1 1D网格结构仿真分析中常用Beam、Bar、Spring、Rod等1D单元来模拟杆状结构,通常只需要几个单元就可能模拟任意截面形状的杆梁结构,可以极大地简化模型网格和节点数量。 1D网格一个单元由两个节点组成,结构如下图所示。 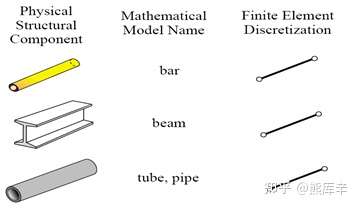 1D单元 1D单元各种1D单元,Beam、Bar、rod、Spring,的根本区别在于能传递的载荷不一样。Beam即梁单元可以传递轴向拉压载荷、横截面内的剪力、弯矩、扭矩和截面扭曲变形,现实结构中所有载荷都能传递;Bar无法产生截面扭曲变形;Rod即杆单元只能传递轴向拉压载荷和扭矩,可模拟桁架结构;Spring即弹簧,有单向弹簧和多向弹簧,可以是线性弹簧也可以是非线性弹簧。 1.2 2D网格对于薄板结构,如汽车发动机罩,通常厚度不到1mm,如果用实体单元模拟,厚度方向至少三层网格才能捕捉厚度方向的应力梯度,网格数量将非常庞大,因此简化为2D网格将极大地减少网格数量,提高求解效率。 三角形网格共三个节点,四边形网格共四个节点,如下图所示,面网格每个节点有6个自由度。 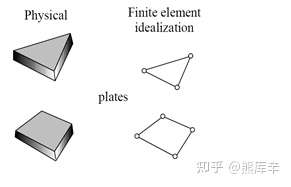 2D单元 2D单元四边形网格比三角形网格多一个节点,因此其试函数阶次更高,求解精度更高。建议尽量使用四边形网格,其求解精度更高。如果结构无法全部划分为四边形网格,请尽量保证重点关注区域,如圆孔附近、倒角区域尽可能使用四边形网格。 1.3 3D网格3D网格一般有四面体、五面体(三菱柱和金字塔)和六面体网格三类,五面体一般用于四面体和六面体间的过渡网格,建议尽量少用。结构仿真中使用最多的3D网格是四面体和六面体,如下图所示。 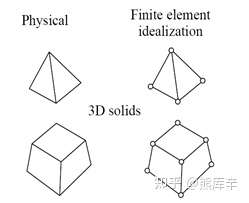 3D单元 3D单元实体网格每个节点只有3个移动自由度,没有转动自由度,因此无法直接对实体单元上的节点施加转矩,结构仿真中一般用RBE3单元将承载点抓起来,然后在RBE3中心点上施加转矩。 1D、2D和3D网格都可以分为一阶和二阶网格,二阶风格通常在网格每条边中间加一个节点,如二阶三角形网格6个节点,二阶四面体共10个节点。 实体网格求解精度由高到低排名顺序为:二阶六面体>二阶四面体>一阶六面体>一阶四面体,因此一般不建议使用一阶四面体网格。 二、如何选择网格类型?1D、2D、3D总共十多种常用网格类型该如何选择呢? 总体原则如下:精细分析建议使用3D网格,简化模型使用1D或2D网格。 2.1 哪些结构使用1D网格?对于长度远大于横截面尺寸的结构,比如长度除以宽度大于20,可使用1D网格进行模拟。 结构是材料力学和结构力学重点研究的杆梁结构,一般使用1D单元模拟。桁架结构、弹簧、细长管等结构都可以使用1D单元进行模拟。 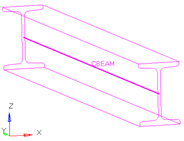 工字梁简化为1D单元 工字梁简化为1D单元使用1D单元模拟时,其截面一般无法变形(伯努利梁截面无法变形,铁木辛柯梁截面可以变形),因此比实际结构更刚硬,也无法得到非常准确的表面应力仿真结果。如果只是想知道该结构传递的载荷大小,1D单元完全满足精度要求;如果要关注该结构具体的应力分布,需要使用2D或3D网格进行模拟。 2.2 哪些结构使用2D网格?对于一个方向尺寸远小于另外两个方向尺寸的结构,比如长度除以厚度大于20,最少大于10,可以使用2D网格进行模拟。 汽车表面覆盖件,如发动机罩,车门,车顶盖都是典型的薄壁件,一般使用2D单元进行模拟。 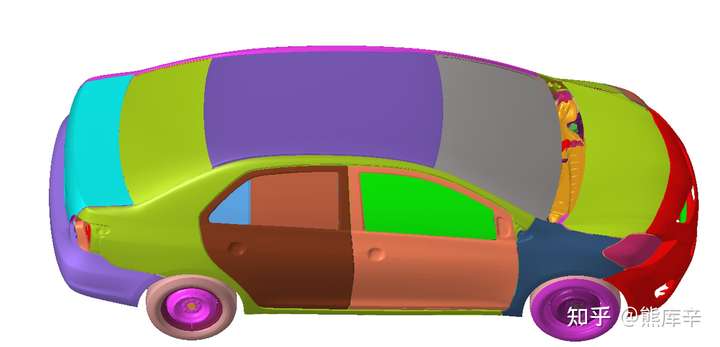 典型的2D网格模型——汽车表面覆盖件 典型的2D网格模型——汽车表面覆盖件2D单元厚度方向一般有多层积分点,可以得到上表面、下表面和中间层的应力分布,如果想得到更精细的应力分布,建议使用实体单元,划分5层以上网格。 2.3 哪些结构使用3D网格?对于三个方向尺寸相当的结构,一般使用3D网格进行模拟,典型的结构是发动机、变速箱和减速器壳体,表面结构复杂,全是倒角、筋等结构,无法用1D和2D单元进行模拟。  典型实体网格模型——减速箱壳体 典型实体网格模型——减速箱壳体对于划分实体网格的模型,有条件的情况下,建议尽量使用一阶六面体网格,相同网格尺寸下,一阶六面体网格数量少,求解效率高,而且其精度远高于一阶四面体网格;如果六面体网格划分困难,可直接使用二阶四面体网格,虽然网格和节点远远多于一阶六面体,但求解精度略高于一阶六面体网格。 2.4 焊点焊缝等特殊结构如何处理?对于焊点、焊缝、粘胶等连接结构,若不关注其本身应力分布,在模型中只起传力作用,可直接忽略,做成共节点的结构或者使用RBE2单元进行刚性连接;  RBE2简化连接 RBE2简化连接若需要更进一步细化模型,可以使用六面体网格+RBE单元的组合,即有限元软件中的connecter单元进行模拟,因为很难得到准确的材料参数,这种结构可以得到焊点焊缝大概的应力范围,无法得到准确的应力结果。  焊点 焊点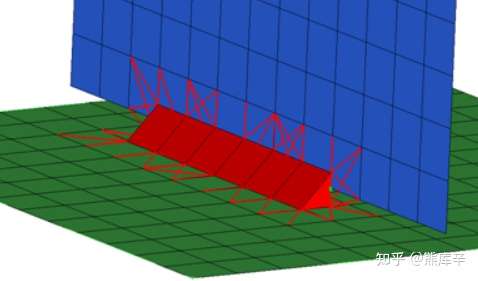 焊缝 焊缝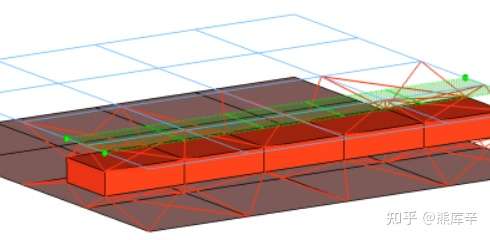 粘胶 粘胶对于螺栓结构,若不关心其具体受力,只用于传力,一般可用两个RBE单元抓取两个圆孔一圈节点,中间用一个梁单元进行模拟。 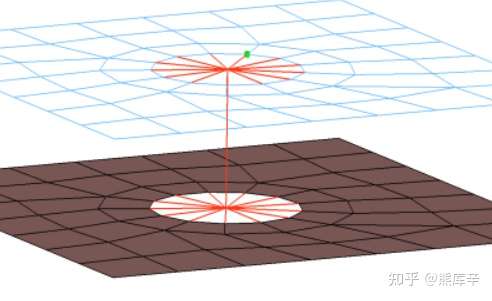 简化螺栓 简化螺栓若希望得到螺头与零件接触区域更准确的应力分布,可以去掉螺纹,做成实体螺栓。  实体螺栓三、网格尺寸及网格质量标准3.1 如何确定网格尺寸? 实体螺栓三、网格尺寸及网格质量标准3.1 如何确定网格尺寸?确定网格类型即可着手划分网格了,划分网格需要的第一个参数是网格尺寸。不同产品本身尺寸不一样,其网格尺寸肯定也不一样,船舶网格尺寸可达到500mm,而芯片网格可以只有几十微米,那么该如何确定网格尺寸呢? 汽车行业仿真分析发展已经非常成熟,有明确的仿真规范,包括网格尺寸的规范,直接按照规范一步一步往下做即可,这些规范都是经过严格测试才确定的,一般都能满足当前分析精度要求。 如果是在一些仿真分析还没有形成明确规范的行业,比如耳机、路由器,该如何确定网格尺寸呢? 实际产品结构都是连续结构,有无限多自由度,而仿真分析使用有限数量的网格模拟连续结构,用有限的自由度模拟无限自由度结构,自由度减少,刚度变大,因此仿真变形和应力通常比实际更小。 理论上来说,在其他设置正确的情况下,网格越密,求解精度越高;但网格越密,数量越多,求解时间越长;因此需要在求解效率和求解精度间做一个权衡。 要确定合适的网格尺寸,需进行网格尺寸测试,找到下图红色方框中的拐点,与精确解误差在5%以内,继续加密,精度无法显著提升; 对于复杂模型,无法确定精确解,需要不断加密网格,若加密后的模型最大应力和加密前相差小于5%,即可认为网格尺寸已经收敛,已经捕捉到准确的应力。 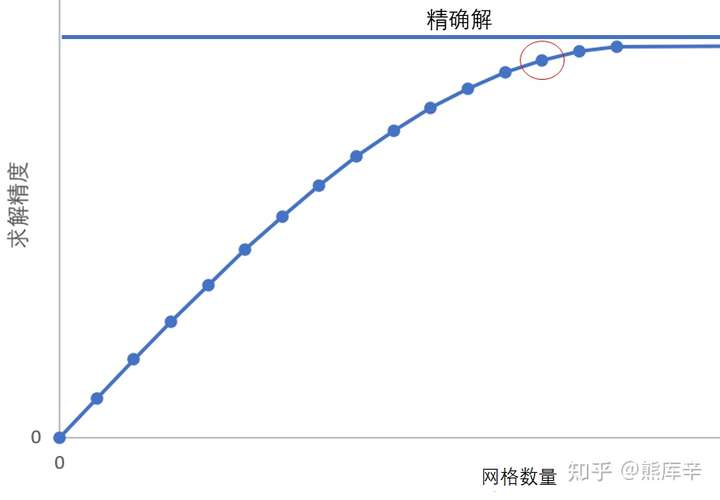 求解精度 vs 网格数量 求解精度 vs 网格数量初次划分网格时,建议先以要保留的最小特征尺寸的两倍左右开始划分网格,对于大块平面网格可以加粗到全局平均尺寸的两倍;基于初次划分的网格模型进行求解计算,然后对高应力区域进行网格加密,以捕捉准确的应力结果;对于售后部门反馈的易破坏区域也要进行网格加密,捕捉准确的应力结果。 若没有网格尺寸规范,建议先初步确认网格尺寸,然后分多次加密高应力区域网格,直到两次应力结果差值小于5%,即可认为局部区域网格已经达到收敛。 3.2 如何评价网格质量好坏?评价网格质量有两个基本的指标:1)网格模型要贴合几何模型,保留必要的几何特征;2)网格本身质量好,满足长宽比、雅克比、最长最短边、最大最少内角等具体指标要求。 3.2.1 如何保证网格与几何贴合? 网格模型与几何模型越贴合,仿真分析就越能得到准确的变形和应力结果;若网格与几何存在明显的偏差,则仿真分析的结果与实际变形和应力偏差就越大,因此网格模型越贴合几何模型越好。 但网格是规则的三角形、四边形、四面体和六面体,无法100%贴合圆弧、倒角和圆孔等特征,网格模型只能近似地贴合实际的几何模型。 几何模型中较难处理的是倒角、圆孔、法兰、接触区等特征上的网格,网格要求如下: 倒角区域至少三层网格才能较为准确地捕捉应力变化,重点区域倒圆角不能简化为直角,直角可能导致应力奇异;变速箱、发动机机壳体上的加强筋及类似结构至少要6层网格才能比较准确地捕捉应力梯度;圆孔周向网格数量建议4的倍数,不重要的小孔直接去掉或在圆周方向分4层,重要的圆孔在圆周方向划分8层及以上,因为CAD软件中圆柱面一般会分为两份或者四份;法兰面至少三层网格,网格层数太少,无法捕捉应变变形梯度;接触区域节点重合更容易收敛,高度非线性模型,接触位置建议做成节点重合,可有效提高接触收敛性;重点区域圆孔建议加washer,washer直径大于或等于螺母直径,方便创建螺栓,圆孔周围应力不准确,看结果时可忽略。3.2.2 网格质量标准 网格初步划分完成之后,需要进行网格质量检查,如何确定网格质量标准呢?一般来说,求解器都有一套最低网格质量标准要求,只要求解器能正常求解计算,一般都能保证大概80%的精度,但如果希望得到更准确的仿真结果,需要进一步提升网格质量,特别是重点关注区域的网格质量。 某结构求解器最低网格质量要求如下:  三角形网格质量标准 三角形网格质量标准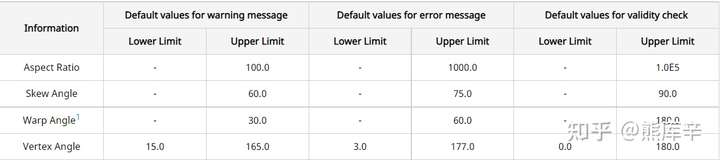 四边形网格质量标准 四边形网格质量标准 四面体网格质量标准 四面体网格质量标准 六面体网格质量标准 六面体网格质量标准等边三角形、正方形、正四面体和正六面体是最完美的网格,偏离完美网格越远,网格质量越差。 由前面四张网格质量标准图可以看出,所有类型的网格质量标准第一项都是长宽比(Aspect Ratio),这也是最重要的一项,长宽比指网格中最长的边和最短边(或者最短高)的比值,长宽比取1最好,最大建议不超过10,较好情况取5以内。 除了长宽比,我们一起来看看各种网格要关注的其他参数指标。 三角形:控制Skew angle=90-min(a,b),小于60度  Skew angle Skew angle四边形:控制翘曲角度(两个三角形法向夹角),小于5度 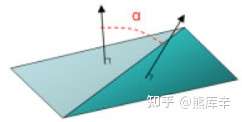 Warpage Warpage 四面体:控制最小高度,避免坍塌,要求tet collapse大于0.1。 六面体:最重要的是避免扭曲,使用雅各比(jacobian)值进行控制;网格形状越接近正六面体,雅各比越接近1,网格形状越远离正六面体,雅各比越接近0。复杂模型要求雅各比大于0.5,雅各比大于0.7更好。 很多网格质量参数其实是相关联的,比如控制好了长宽比,一般不会出现小的夹角,控制好雅各比值,一般不会出现明显的翘曲等。 四、各行业常用结构网格类型汽车:整车结构、NVH仿真分析时,表面覆盖件多使用四面形面网格;发动机机变速箱用二阶四面体网格; 手机:后盖和中框结构复杂,一般使用二阶四面体网格;屏幕、PCB等板状结构做简化,划分六面体网格; 航空:表面蒙皮和主要梁结构使用四边形壳网格,重点区域加密; 船舶:外壳和主要框架结构使用四边形壳网格,重点区域加密; 重工:外壳、板、管等结构都划分四边形壳网格,动力总成使用二阶四面体; 家电:薄壳结构简化为四边形壳网格,复杂注塑件使用二阶四面体网格。 五、网格划分学习资料推荐专业网格划分工具,可以分为两类:HyperMesh和其他。 Altair1989年发布第一版的HyperMesh几乎一家独大,汽车、航空、手机各行业做仿真几乎都离不开HyperMesh,1D、2D、3D网格通吃,几何修复、几何简化、抽中面、四面体、六面体网格都很强。 当然HyperMesh也有竞争对手,比如壳网格划分很强的ANSA,四面体网格划分很强的SimLab,也有自动划分网格的Ansys Workbench等,但目前没有哪个网格划分工具可以全方位挑战HyperMesh。 关于HyperMesh的学习资料,建议大家关注Altair的B站官方账号:Altair中国,上面有大量的网格划分视频教程。 |
【本文地址】