| 树莓派控制步进电机(上):硬件连接 | 您所在的位置:网站首页 › 乐高积木马达如何连接驱动轮子 › 树莓派控制步进电机(上):硬件连接 |
树莓派控制步进电机(上):硬件连接
|
目录 说明 硬件连接 DM542的连接方法 树莓派的连接方法 参考文献 说明最近需要测试树莓派控制步进电机的功能,在查阅网上资料的基础上做了一些整理和测试,特别记录在此。这里我们使用的是树莓派4B开发板,步进电机为6线两相步进电机,驱动器采用的是DM542。 硬件连接 DM542的连接方法DM542(图1)是数字式两相步进电机驱动器,采用PI控制算法,低噪音、低振动、低发热,低中高速运行都很平稳。
图1 DM542的外观 DM542的+V端口连接电源正极,而GND端口连接电源负极。 DM542的A+和A-是一组,连接电机的一相,而B+和B-是一组,连接电机的另一相。 参考文献2说:“驱动器接收的脉冲高电平为5V,而树莓派GPIO端口输出的高电平为3.3V,所以需要经过“3.3-5V电平转换模块”。经过实测,这个电平转换模块是不需要的。 我们采用共阴极接法,即将PUL-和DIR-端口都连接到树莓派的地接口。DM542的PUL+端口是脉冲输入,而DIR+端口控制电机转动方向,高电平正(反)转,低电平反(正)转。ENA+和ENA-端口不使用。 DM542可以通过拨码开关(图2)控制转一圈所需要的脉冲数。在测试中,我们使用的出厂默认的设置,即每圈需要400个脉冲。如果需要更高的步进角精度,可以参照图3调整拨码开关。
图2 拨码开关
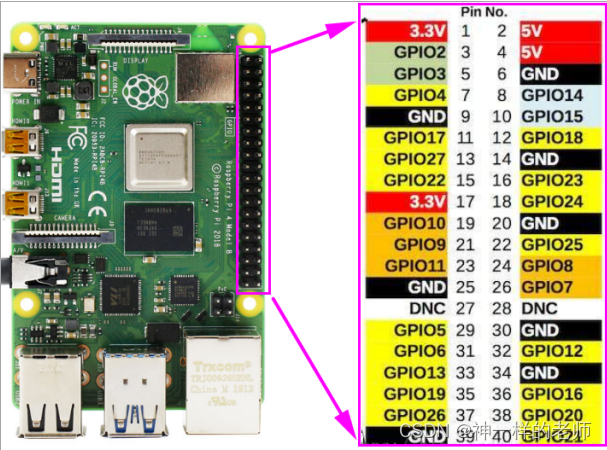
图3 步进电机的步距角设定 树莓派的连接方法树莓派的GPIO接口如图4所示。
图4 树莓派4的GPIO管脚图 在将DM542和树莓派连接时,需要将PUL-和DIR-端口都连接到树莓派的地接口,我们选择的是39和34脚。DM542的PUL+端口是脉冲输入,连接到树莓派的34脚。而DIR+端口控制电机转动方向,连接到树莓派的40脚。如果连接的管脚不同,需要修改程序中相关变量的定义。 有关软件编程请参见下一篇博文。 参考文献 叕叒双又,树莓派4硬件---GPIO篇,https://www.cnblogs.com/guochaoxxl/p/11728108.htmlmob6454cc6a01b7 ,树莓派pwm控制电机python 树莓派 控制电机,https://blog.51cto.com/u_16099225/7598976春天里晴朗的天空,树莓派(一)python接口RPi.GPIO介绍,树莓派(一)python接口RPi.GPIO介绍-CSDN博客 |



【本文地址】
公司简介
联系我们