| PID调参过程详解(包括增量式和位移式) | 您所在的位置:网站首页 › pid振荡怎么解决 › PID调参过程详解(包括增量式和位移式) |
PID调参过程详解(包括增量式和位移式)
|
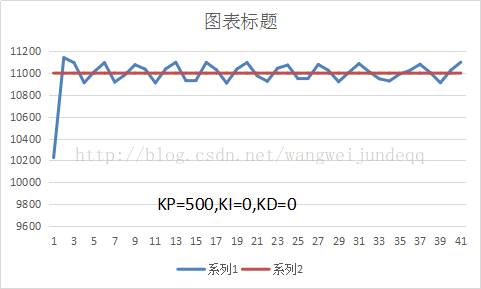
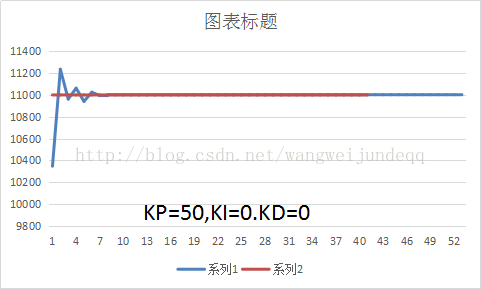
位置闭环控制就是根据编码器的脉冲累加测量电机的位置信息,并与目标预设值做比较,得到控制偏差,然后通过对偏差的P比例,I积分,D微分进行控制,使偏差趋于零的过程 位置式PID调参步骤: 预设目标值是11000 1.首先,我们进行PID参数整定的时候,先设I D为0,然后把P值从0逐渐增大,直到系统震荡.如下图(P值设的500,这是因为P值过大,出现了震荡.这时我们就需要调整P值大小,让曲线出现静态,而静态一般实在P值较小而且I值为0情况下才出现,如第二个图,我将P设置为50即) ps:(我使用的是串口打印出实际值和预测值,然后word打印的表格 未使用串口波形助手,也可百度收缩串口波形助手 原理一样 这里注重调参过程)
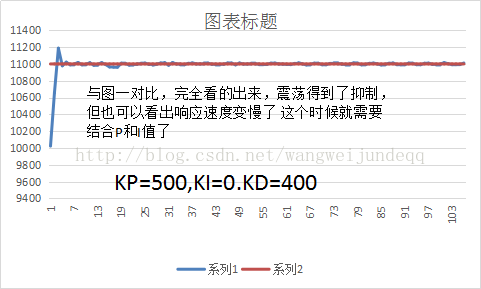
由上图可以看出,我们提高了P的值一定程度上消除了静差,提高了响应速度,但是会导致系统震荡,故我们加入微分D可以有效抑制震荡. 故我们加入KD试试效果
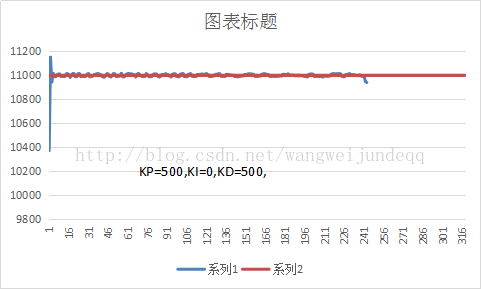
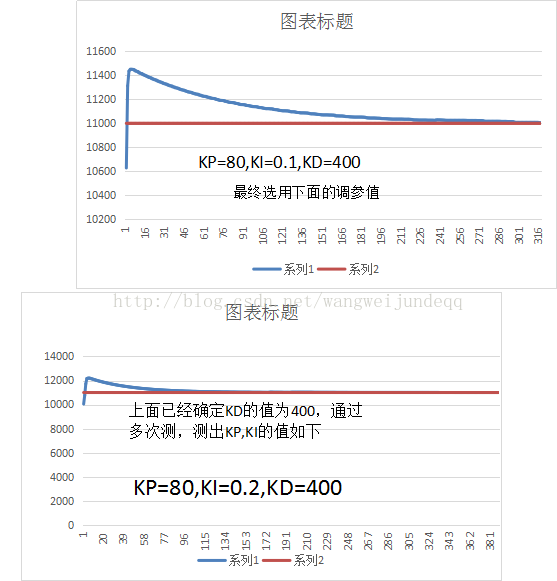
可以确定KD的值即为500了,然后我们就调整KP和KI,调试电机,一般KI的值都很小或者根本不需要. 调试KP,一般应该把P给小一点,然后KD应该尽可能大点,I值一般都是0.几
总结:一开始先加大比例P,p小了会达不到目标速度,会差很多,所以再加大p,知道电机出现‘嗒嗒嗒’的抖动或者观察上位机的波形剧烈抖动的时候,这时候p就过大了,实际上p可以不是很大,比如400,调试时候增加幅值可以设为20,I稍微来点就可以,平衡车的工程经验是ki=kp/200,但是这里我给的是0.2,还要看具体情况,积分参数过大,实际速度和目标速度的静差会很大。
电机速度闭环控制使用增量式PI调参 和上面的方法一样的,只是步骤稍微有点不一样 增量式pid调节目标速度时候参数整定: 先加大KI,这时候会越来越接近实际速度,当KI过大的时候,在切换目标速度的时候,就会抖动,这时候就是KI大了响应速度高了,但导致超调量增加,这时候就加大增量式的KP,来缓减抖动,减小超调量。 |
【本文地址】