| 基于Smiulink仿真的升降压电路和扫频法的PI参数自动整定 | 您所在的位置:网站首页 › 鼠标结构分析鼠标的结构图和工作原理是什么 › 基于Smiulink仿真的升降压电路和扫频法的PI参数自动整定 |
基于Smiulink仿真的升降压电路和扫频法的PI参数自动整定
|
在控制系统控制器设计过程中,PID控制作为基础的控制方法,得到了广泛的应用。常用的经验整定方法虽然使用方便,但是需要一定的经验,不能快速的实现对系统的有效控制。因此,本文利用MATLAB/Simulink中自带的PID Tuner模块,基于扫频法得到的升降压电路的升压状态(Boost)的传递函数,实现了对PID参数的快速整定,仿真验证实验效果良好。 本方法一共分为五个部分,对升降压电路工作模式分析、扫频法获取传递函数、PID Tuner参数整定、仿真实验结果验证、总结分析。 第一部分 升降压电路工作分析如图1所示,升降压电路是一种常见的开关直流电路,通过控制两个开关管的占空比,可以实现对负载侧电压的控制。分析电路结构可知,两个开关管的触发信号应该具有互补的特性。本文从升降压电路的升压特性进行分析,降压原理类似。 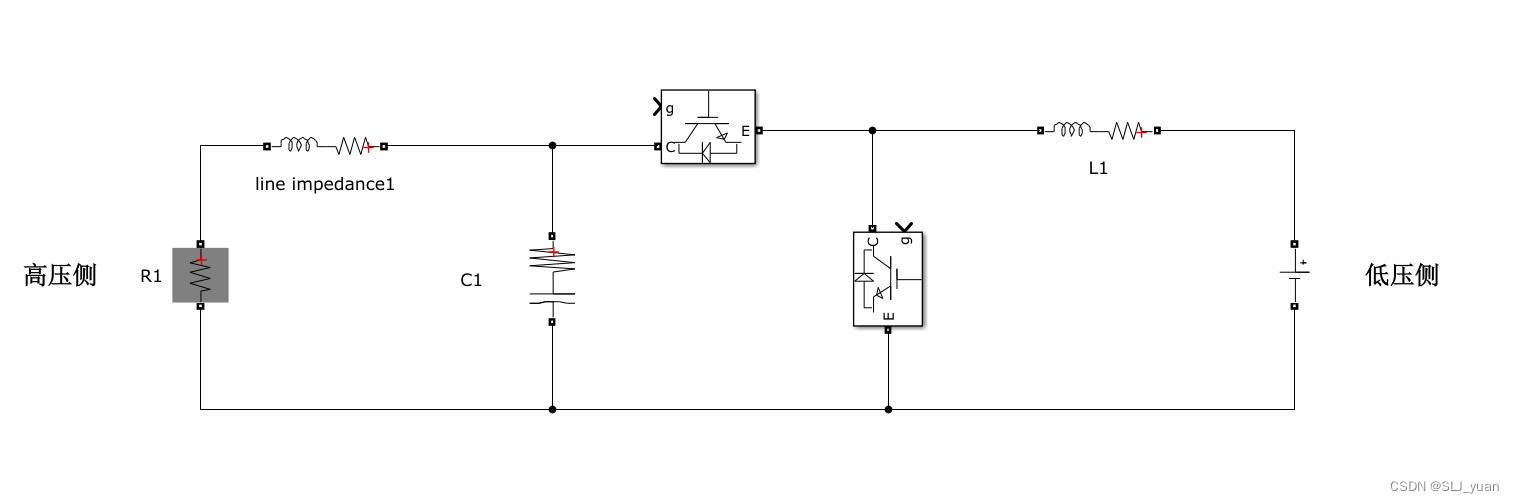 图1 升降压电路电路图
图1 升降压电路电路图
通过控制开关管的开通与关断,可以将升降压电路分为两种工作状态,分别为充电过程和放电过程。电感充电时,等效电路图如下图所示,电压对电感充电,电容放电给负载供电;电感放电时,等效电路图如下图所示,电感具有续流效果,电压和电感惯性对电容和负载充电。 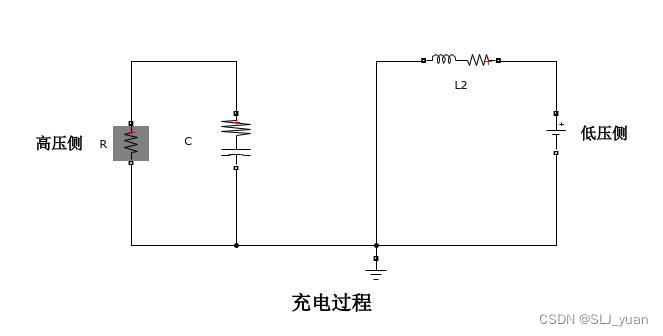 图2 充电等效电路
图2 充电等效电路
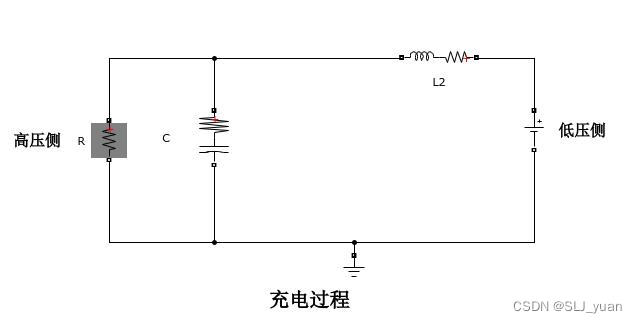 图3 放电等效电路
图3 放电等效电路
对两种工作状态进行分析,列出电路的状态方程,经过推算之后,可以得出输出电压与占空比有关,满足公式(1),当占空比大于0.5时,电路以升压电路状态工作;小于0.5时,电路以降压电路状态工作。 升降压电路的传递函数可以通过小信号模型准确推导,但是由于小信号模型的分析比较复杂,需要仔细计算推导,而采用扫频法可以快速确定电路的传递函数,便于对系统的控制器进行设计。对图4所示电路进行扫频法,获取传递函数过程如下: (1)将仿真模型中开关管的触发信号开环,通过固定占空比产生PWM确定。 (2)添加输入扰动和输出测量点(扰动添加到占空比,测量添加到负载电压或电流,通过后续扫频,即可获得占空比到电压的传递函数),如图4 APPS -> Linearization Manager -> Input Perturbation(点击电线,添加扰动) APPS -> Linearization Manager -> Output Measurement(点击电线,添加测量点) 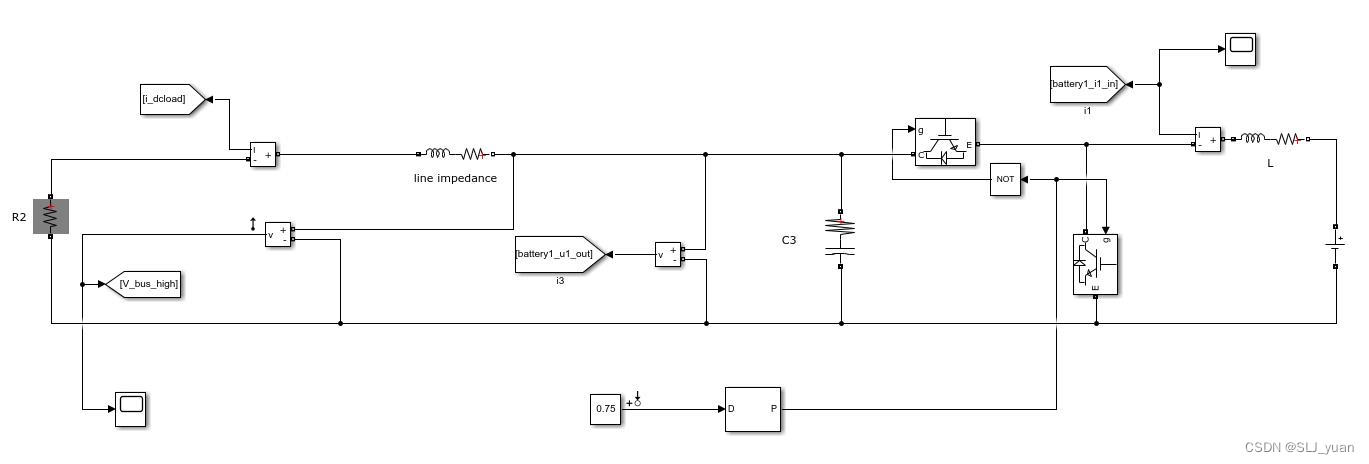 图4 加入扰动和测量点后电路
图4 加入扰动和测量点后电路
(3)进行扫频实验,依次配置扫频工作方式 打开APP工作区(APPS -> Model Linearizer) 选择输入信号(ESTIMATION -> Input Signal) 输入信号选项中,第一个为连续信号,即对应PowerGui的Continuous;第二个为离散信号,即对应PowerGui的Discrete。以第二个信号为例进行设置,选择后需填入仿真时间,对应PowerGui的Sample time即可,如图5。 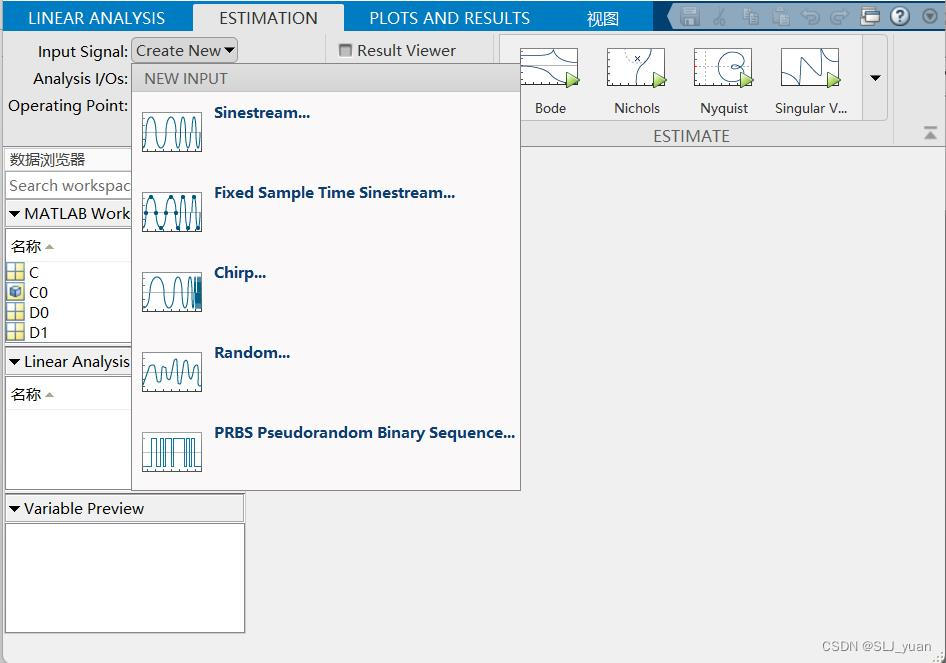 图5 选择扰动信号类型
图5 选择扰动信号类型
配置过程中,需选择 Frequency units -> Hz,然后添加频率测量点,specify by -> range(频率选择范围根据开关频率进行设置,最大值为开关频率附近,最小值在10-100范围均可),此处设置为10至11000的频率范围,40个采样点。全选采样点后,选择Amplitude为0.05(扰动量大小),其余为默认配置,如图6。 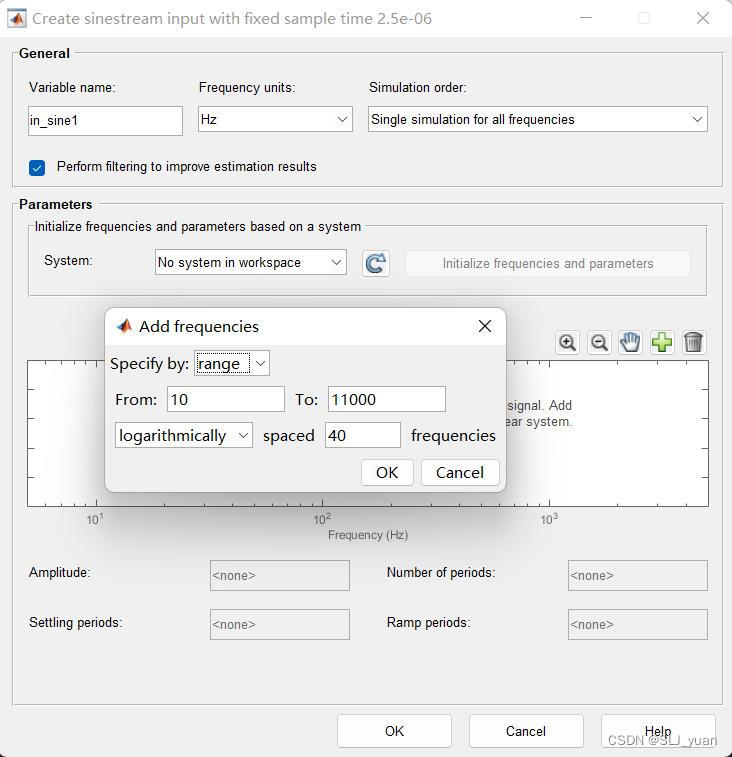 图6 设置采样点
图6 设置采样点
选择工作开始时间(ESTIMATION -> Operating Point) 确定仿真开始时间,一般设置稳定工作后的时间,此处设置为0.1,如图 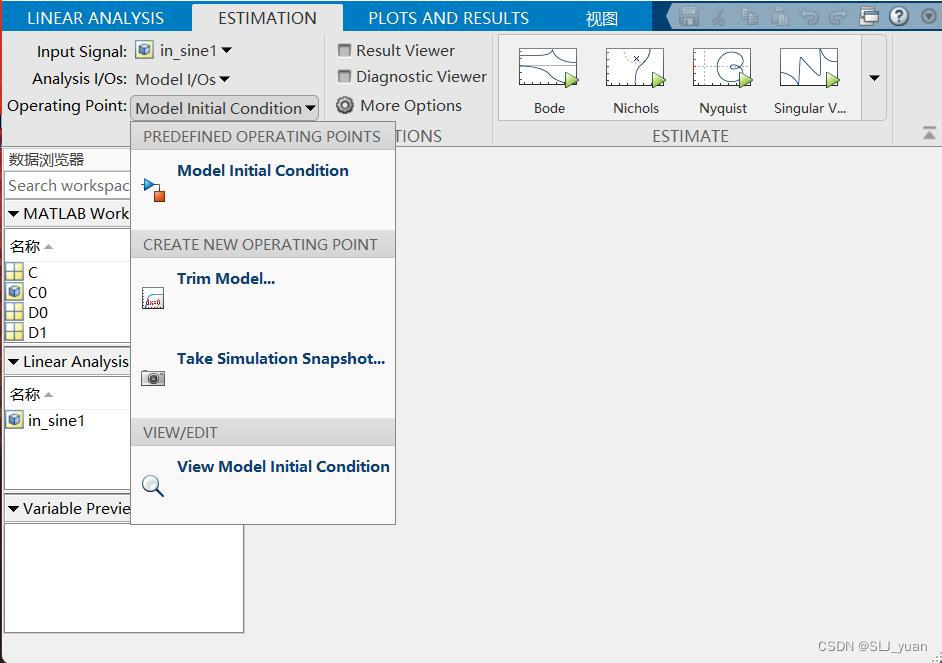 图7 确定稳定时间
图7 确定稳定时间
绘制Bode图,点击Bode,生成仿真数据(即从占空比到输出电压的Bode图),如图8所示 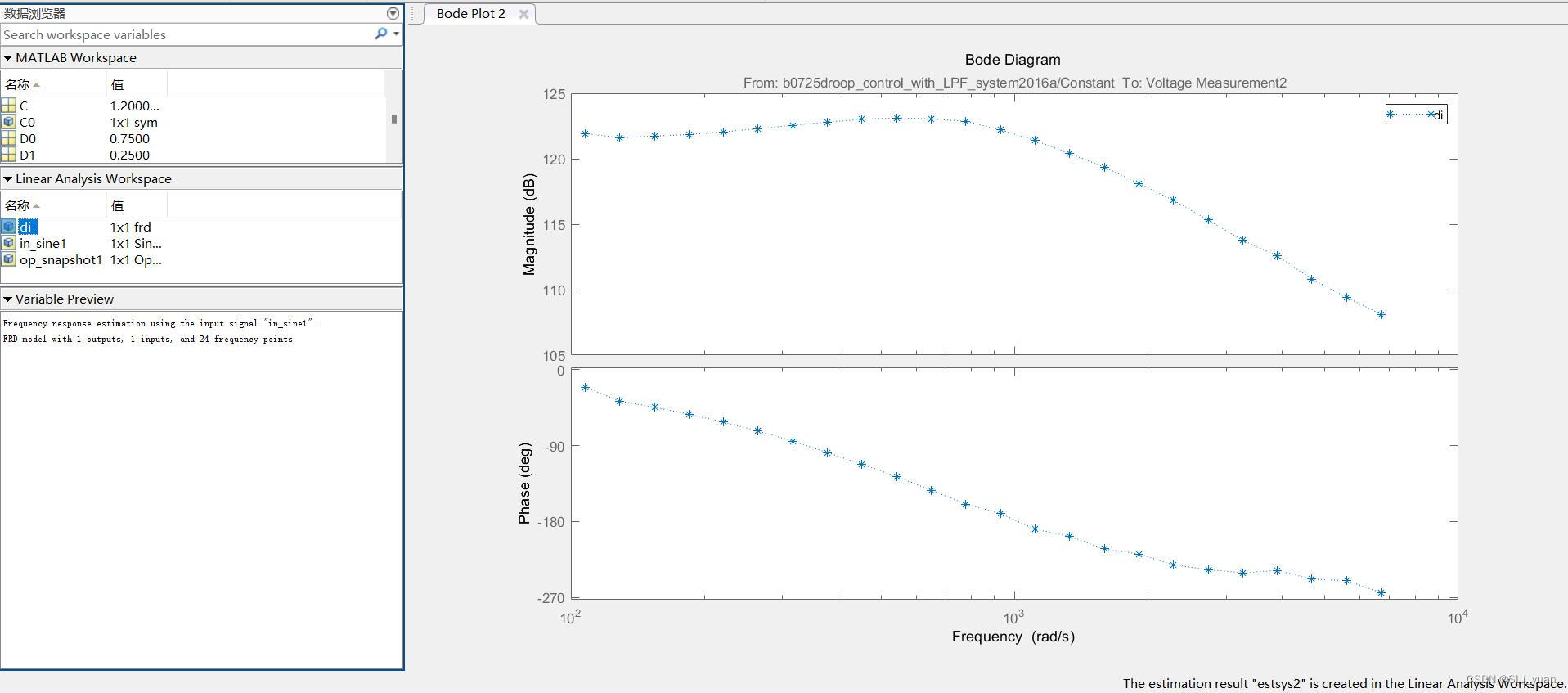 图8 仿真得到Bode图
图8 仿真得到Bode图
更改步骤(2)输出测量点,重复以上步骤,获得占空比到电压的Bode图 (4)MATLAB生成传递函数 将扫频法绘制的Bode图数据复制到Workspace,利用公式拟合传递函数。 以占空比到电压为例,将扫频法拟合得到的传递函数与小信号模型计算得到的传递函数对比,如图9,可以看出两者基本一致,扫频法准确性得到验证。 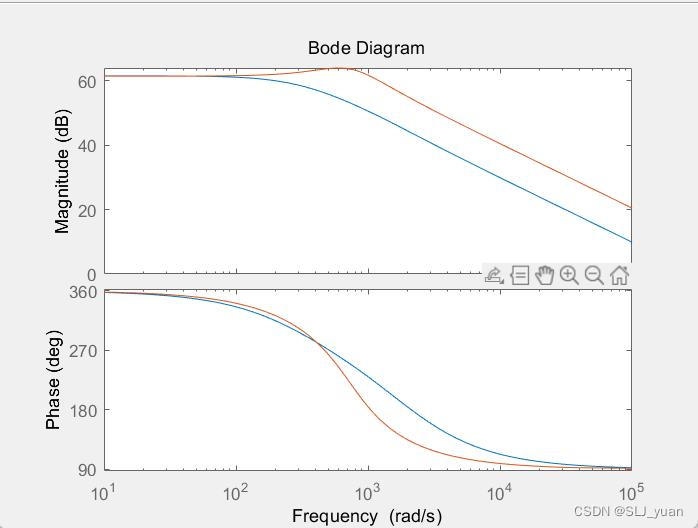 图9 Gud和sysdu拟合度
图9 Gud和sysdu拟合度
第三部分 PID Tuner 第二部分通过扫频法得到系统的开环传递函数,为实现对升降压电路的控制,本文采用电压电流双闭环控制系统,结构图如图10。利用控制器PID分别实现对电流和电压的控制,双闭环控制过程中,一般遵循内环快、外环慢的原则,先设计电流环参数,再设计电压环参数。 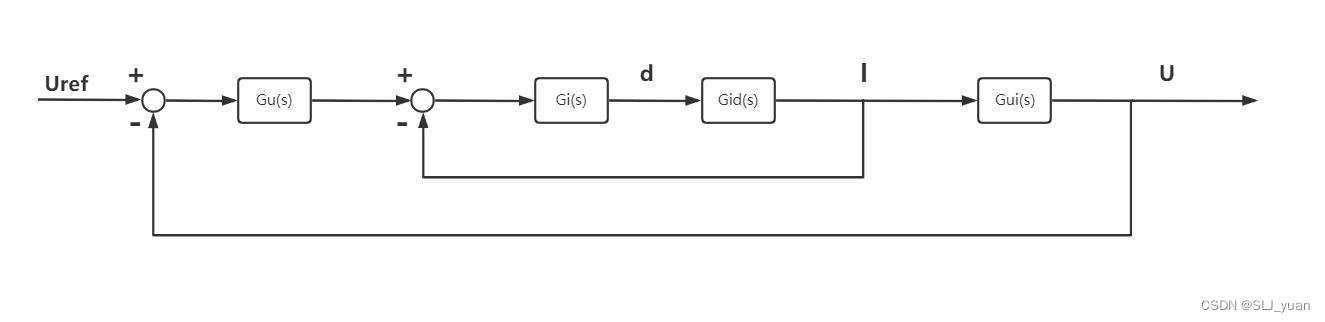 图10 双闭环系统结构图
图10 双闭环系统结构图
(1)电流环参数设计(PID Tuner) 打开PID Tuner(MATLAB -> APP -> PID Tuner); 导入拟合得到的d到i的传递函数 sysdi(s)(Plant -> Import); 选择控制器类型、绘制图像在时域还是频域和绘制图像类型选项(绘制图像类型选择Bode -> Reference Tracking,即闭环bode图),如图11;  图11 Tuner设置
图11 Tuner设置
通过调节BandWith和Phase Margain来控制闭环系统的带宽和相角裕度,设置完成后,在右下角获得P、I参数,如图12; 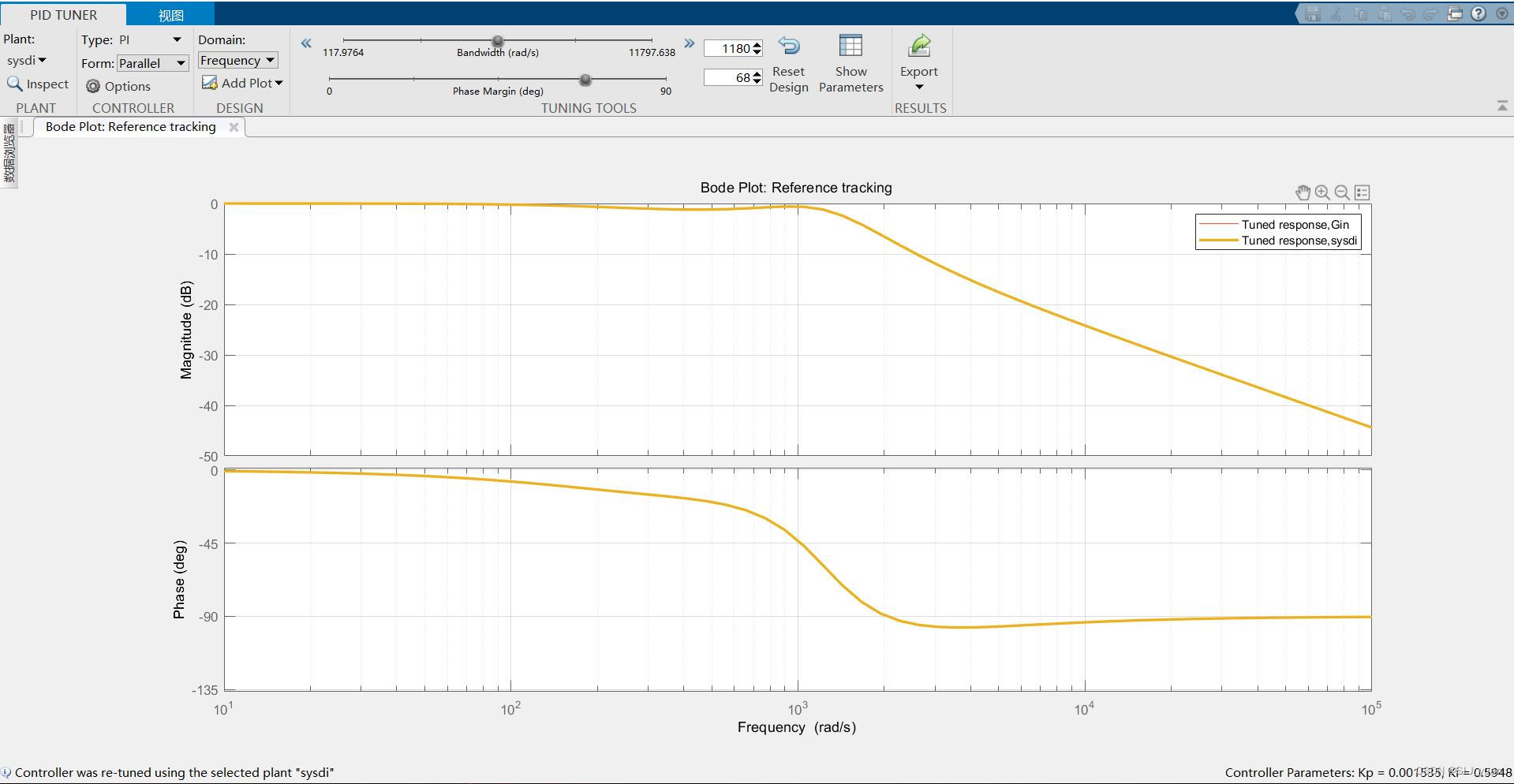 图12 设置带宽获取参数
图12 设置带宽获取参数
将获得PI参数导入Simulink仿真即可。 (2)电压环参数设计(PID Tuner) 在确定完电流内环PI控制器参数之后,即可获得电压内环的闭环传递函数(前向通道/1+开环传函),将其等效为一个环节,通过MATLAB计算得到电压环的开环传递函数,满足公式 式中sysdi(s)为扫频得到的d到i的传递函数,Gui(s)为扫频得到的u到i的传递函数,Gpi1(s)为电流内环控制器的传递函数,满足公式 导入电压环开环传递函数,重复电流环步骤,即可得到电压环的PI控制器参数。 注意:设计PI参数过程中,一般设置带宽范围在开关频率的1/10(可以消除高频分量),相角裕度为60左右(设计过程要尽可能避免Bode图畸变);同时,为了满足内外环的响应速度关系,内环的带宽要高于外环带宽。 第四部分 仿真验证经过两次PID控制器参数自动整定,即可获取内外环均稳定且可以快速响应的参数。将所得参数代入PI控制器(Simulink仿真控制图13),对负载电压和电感电流进行双环控制,如图14所示,控制效果较好,响应速度显著。 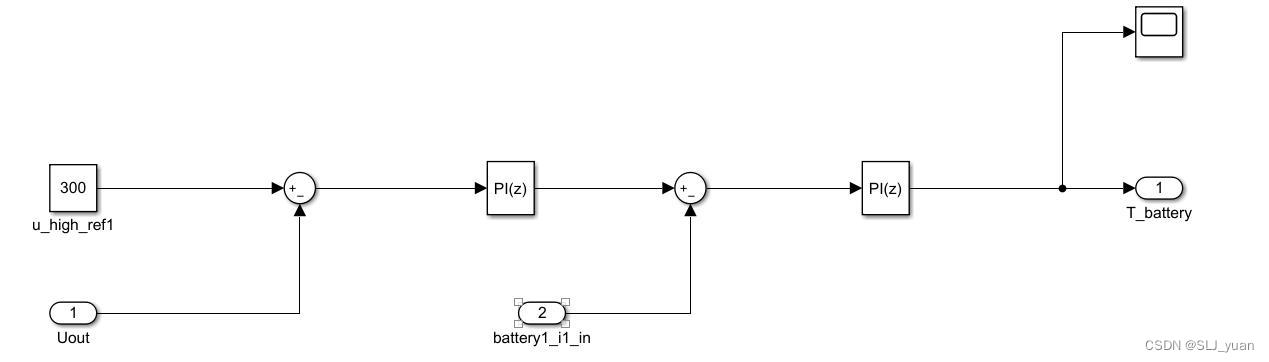 图13 电压电流双闭环仿真
图13 电压电流双闭环仿真
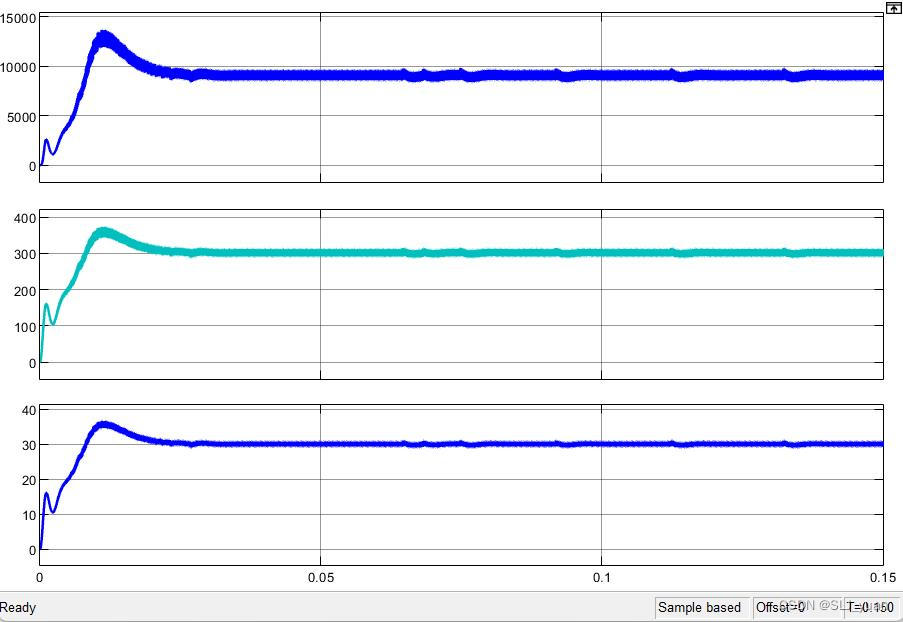 图14 仿真实验结果
图14 仿真实验结果
对于本文提及的升降压电路的电流环和电压环的PI参数整定如下 参数整定电压外环电流内环比例Kp0.066680.00351积分Ki170.91.086 第五部分 总结本方法的主要思路是,基于理论计算整定的方法对内外环PI参数进行设计。借助扫频法实现对系统的传递函数模型的确定,进而借助PID Tuner导入系统传函,由所需的带宽和相角裕度需求对PI控制器进行设计,最后将设计好参数代入控制器,实现良好控制效果。 |
【本文地址】