| 一阶RC高通滤波器详解(仿真+matlab+C语言实现) | 您所在的位置:网站首页 › 高通滤波器曲线图 › 一阶RC高通滤波器详解(仿真+matlab+C语言实现) |
一阶RC高通滤波器详解(仿真+matlab+C语言实现)
|
文章目录预备知识关于电容HPF的推导simulink 仿真simulink 运行结果matlab 实现matlab 运行结果C语言实现
如果本文帮到了你,帮忙点个赞; 如果本文帮到了你,帮忙点个赞; 如果本文帮到了你,帮忙点个赞; HPF 一阶RC高通滤波器详解(仿真+matlab+C语言实现) LPF 一阶RC低通滤波器详解(仿真+matlab+C语言实现) 预备知识高通滤波器(HPF-high pass filter)可以滤除频率低于截止频率的信号,类似的还有低通滤波器,带通滤波器,带阻滤波器。一阶RC高通滤波器的电路如下图所示;
首先对电容的几个公式做一下补充; 电容大小CCC满足; C=qV⋯① C=\cfrac{q}{V} \cdots① C=Vq⋯① 其中 qqq 是电容所带的电荷量,VVV 是电容两端的电势差; 另外,电流相当于单位时间流过导体的电荷量;因此电流 iii 满足; i=dqdt⋯② i = \cfrac{dq}{dt}\cdots②i=dtdq⋯② 根据①,②可以得到电容大小 CCC 和电容的电流 iii 以及两端电压 VVV 的关系; i(t)=Cdv(t)dti(t) = C\cfrac{dv(t)}{dt}i(t)=Cdtdv(t) HPF的推导由以上电路可知,假设电流为 i(t)i(t)i(t),则可知 {Vout=Ri(t)⋯③i(t)=CdQc(t)dt⋯④ \begin{cases} V_{out} = Ri(t) \cdots③ \\ i(t) = C\cfrac{dQ_c(t)}{dt} \cdots④\\ \end{cases} ⎩⎨⎧Vout=Ri(t)⋯③i(t)=CdtdQc(t)⋯④ 电容两端的电压为 Vc(t)V_c(t)Vc(t) 根据基尔霍夫定律,满足; −Vin+VC+Vout=0-V_{in} + V_C + V_{out} = 0−Vin+VC+Vout=0 所以结合①,③,④可以得到; Qc(t)=C(Vin(t)−Vout(t))⋯⑤Q_c(t) = C( V_{in}(t) - V_{out}(t)) \cdots ⑤Qc(t)=C(Vin(t)−Vout(t))⋯⑤ 根据 ③,④,⑤ 可以得到以下关系; Vout=C(dVindt−dVoutdt)⏞I(t)R=RC(dVindt−dVoutdt)⋯⑥ V_{out} = \overbrace{ C( \cfrac{dV_{in}}{dt} - \cfrac{dV_{out}}{dt}) }^{I(t)} R = RC(\cfrac{dV_{in}}{dt} - \cfrac{dV_{out}}{dt}) \cdots ⑥ Vout=C(dtdVin−dtdVout)I(t)R=RC(dtdVin−dtdVout)⋯⑥ 将方程进行离散化,如果输入VinV_{in}Vin和输出输入VoutV_{out}Vout按照 △T\bigtriangleup_{T}△T的时间采样,那么可以将输入和输出序列化,则 VinV_{in}Vin序列化为: (x1,x2,x3⋯ ,xn−1,xn)(x_{1},x_{2},x_{3}\cdots,x_{n-1},x_{n})(x1,x2,x3⋯,xn−1,xn) VoutV_{out}Vout序列化为: (y1,y2,y3⋯ ,yn−1,yn)(y_{1},y_{2},y_{3}\cdots,y_{n-1},y_{n})(y1,y2,y3⋯,yn−1,yn) 根据⑥式可以进行离散化,因此最终滤波输出的序列 yiy_{i}yi 如下所示; yi=RC(xi−xi−1△T−yi−yi−1△T)⋯⑦ y_{i} = RC(\cfrac{x_{i}-x_{i-1}}{\bigtriangleup_{T}} -\cfrac{y_{i}-y_{i-1}}{\bigtriangleup_{T}} )\cdots⑦ yi=RC(△Txi−xi−1−△Tyi−yi−1)⋯⑦ 将⑦再进一步简化得到;
yi=αyi−1+α(xi−xi−1) y_{i} = \alpha y_{i-1} + \alpha(x_i - x_{i-1}) yi=αyi−1+α(xi−xi−1) 其中 α=RCRC+△T\alpha = \cfrac{RC}{RC+\bigtriangleup_{T}}α=RC+△TRC 所以换成得到; RC=△T(α1−α)⋯⑧RC = \bigtriangleup_{T}(\cfrac{\alpha}{1-\alpha}) \cdots⑧RC=△T(1−αα)⋯⑧ 另外截止频率和低通滤波器的相同; fc=12πRCf_c = \cfrac{1}{2\pi RC}fc=2πRC1 将⑧式代入可以得到截止频率和 α\alphaα 的关系; fc=1−α2πα△Tf_c = \cfrac{1-\alpha}{2\pi \alpha \bigtriangleup_{T}}fc=2πα△T1−α 这个公式便于简化后面程序以及截止频率的计算。 simulink 仿真这里根据公式⑥构建simulink的子模块subsystem;
Vout=RC(dVindt−dVoutdt)
V_{out} = RC(\cfrac{dV_{in}}{dt} - \cfrac{dV_{out}}{dt})
Vout=RC(dtdVin−dtdVout)
具体如下所示;
其中Sine Wave1频率设置为2*pi*4,频率为4赫兹;
所以这里需要使得2*pi*4的信号衰减,所以根据,截止频率 fcf_cfc 的计算公式,可以改变增益的值,具体如下所示;
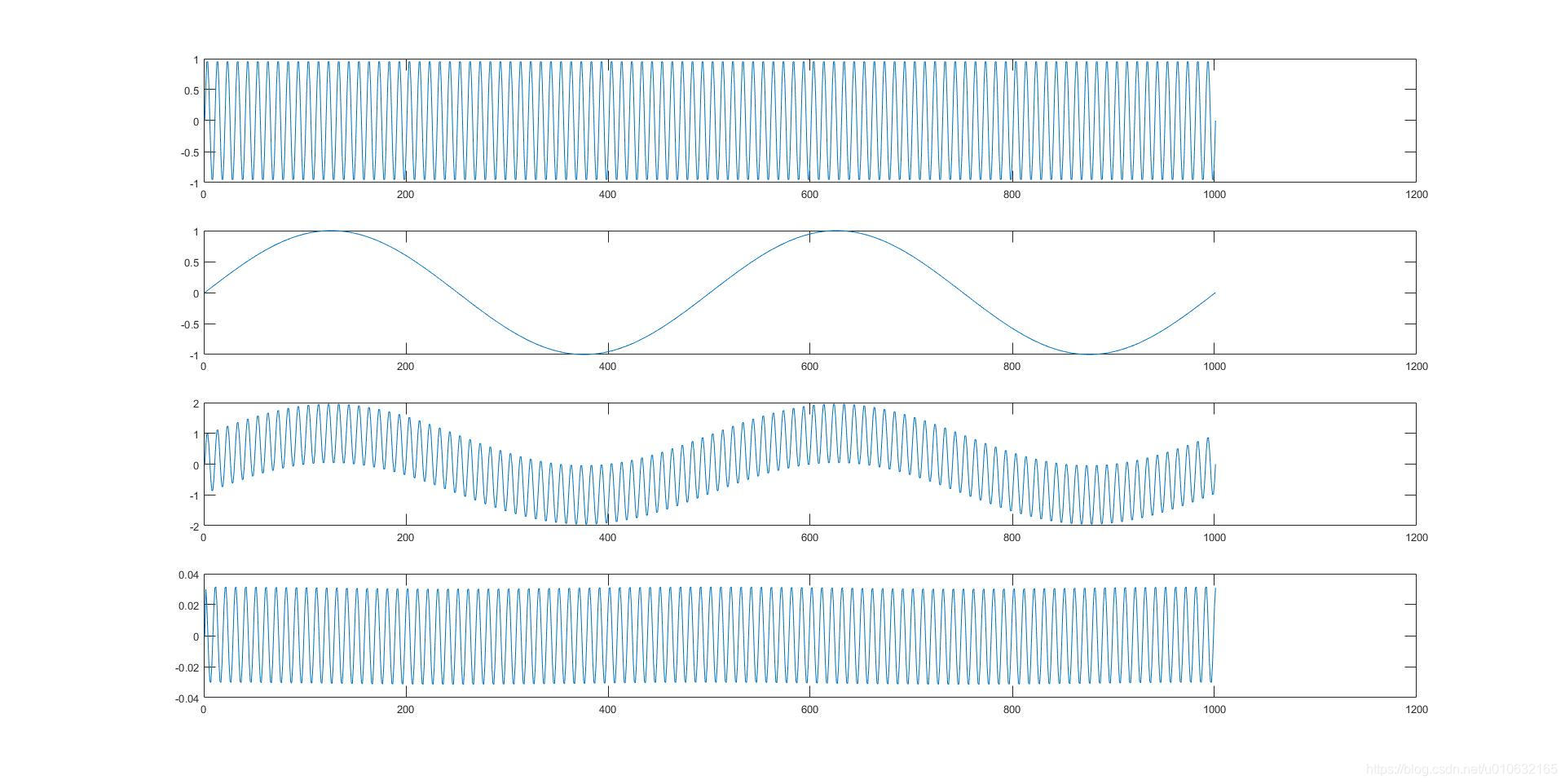
matlab根据以下这个公式进行数字滤波器的设计; yi=αyi−1+α(xi−xi−1) y_{i} = \alpha y_{i-1} + \alpha(x_i - x_{i-1}) yi=αyi−1+α(xi−xi−1) 另外 α\alphaα 的值如何确定需要参考⑧式; Serial = 0:0.1:100; Fs = 1; Phase = 0; Amp = 1; N0 = 2*pi*Fs*Serial - Phase; X0 = Amp*sin(N0); subplot(4,1,1); plot(X0); Fs = 0.02; N1 = 2*pi*Fs*Serial - Phase; X1 = Amp*sin(N1); subplot(4,1,2); plot(X1); X2=X0+X1; subplot(4,1,3); plot(X2); len = length(X2); X3=X2; p=0.75; for i=2:len X3(i) = p*X3(i-1)+p*(X2(i)- X2(i-1)) end subplot(4,1,4); plot(X3);简单地分析一下,代码中的X1,X2,X3; X1频率为1 X2频率为0.02{α=p=0.75△T=0.1fc=1−α2πα△T \begin{cases} \alpha = p=0.75 \\ \bigtriangleup_{T} = 0.1 \\ f_c = \cfrac{1-\alpha}{2\pi \alpha \bigtriangleup_{T}} \end{cases}⎩⎪⎪⎪⎨⎪⎪⎪⎧α=p=0.75△T=0.1fc=2πα△T1−α 因此可以得到截止频率如下; fc=0.252π∗0.75∗0.1≈0.53f_c=\cfrac{0.25}{2\pi *0.75* 0.1} \approx 0.53fc=2π∗0.75∗0.10.25≈0.53 matlab 运行结果
其中; FilterTs为采样时间 △T\bigtriangleup_{T}△T; FilterTf为RC时间常数; Input[0]表示 xix_ixi; Input[1]表示 xi−1x_{i-1}xi−1; Output[0]表示 yiy_iyi; Output[1]表示 yi−1y_{i-1}yi−1; Ky表示RCRC+△T\cfrac{RC}{RC+\bigtriangleup_{T}}RC+△TRC;参考公式如下所示;
|


 整体的仿真如下图所示;
整体的仿真如下图所示;
 其中Sine Wave频率设置为2*pi*40,频率为40赫兹;
其中Sine Wave频率设置为2*pi*40,频率为40赫兹;


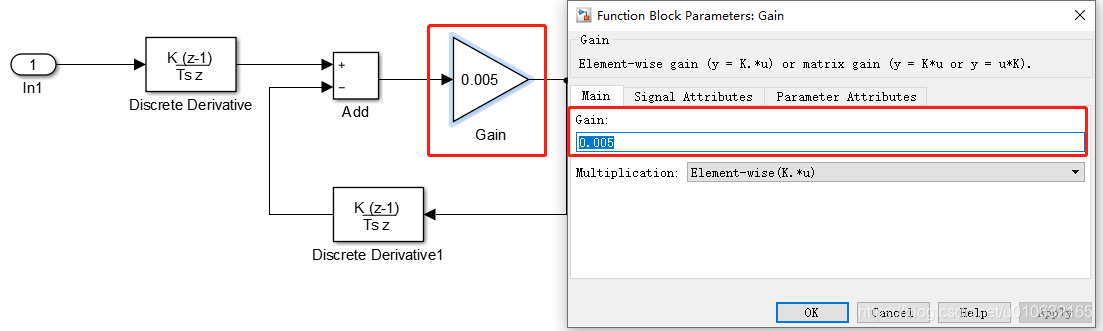 这里RC增益为0.005,因此
fc=12πRC=12π∗0.005≈31.8f_c = \cfrac{1}{2\pi RC} = \cfrac{1}{2\pi *0.005} \approx 31.8fc=2πRC1=2π∗0.0051≈31.8
这里RC增益为0.005,因此
fc=12πRC=12π∗0.005≈31.8f_c = \cfrac{1}{2\pi RC} = \cfrac{1}{2\pi *0.005} \approx 31.8fc=2πRC1=2π∗0.0051≈31.8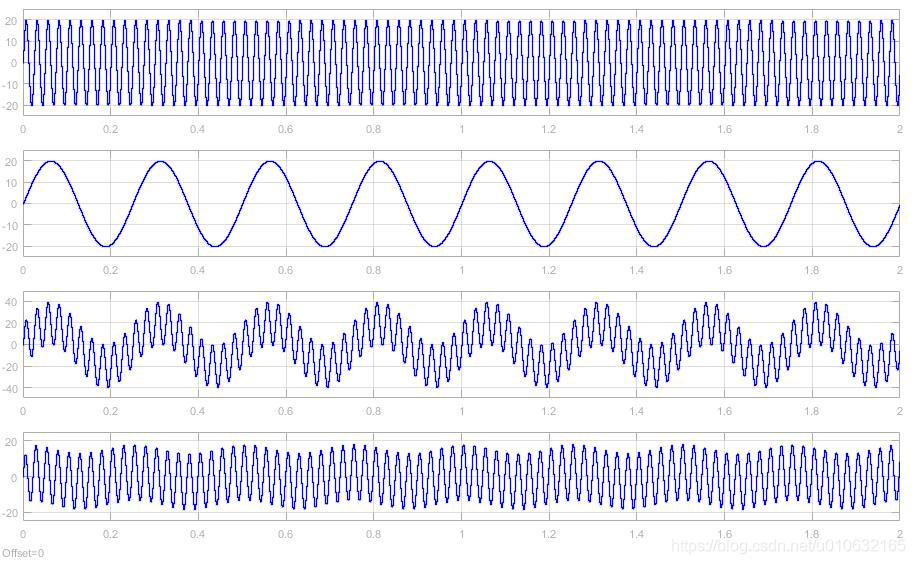

【本文地址】