| 雷达系统设计及matlab仿真(一) 第一章 雷达基础知识概论(测距 距离分辨率 多普勒频率 雷达方程 噪声和信噪比 脉冲积累) | 您所在的位置:网站首页 › 雷达噪声功率 › 雷达系统设计及matlab仿真(一) 第一章 雷达基础知识概论(测距 距离分辨率 多普勒频率 雷达方程 噪声和信噪比 脉冲积累) |
雷达系统设计及matlab仿真(一) 第一章 雷达基础知识概论(测距 距离分辨率 多普勒频率 雷达方程 噪声和信噪比 脉冲积累)
|
第一章 雷达基础导论
1.1.雷达分类1.1.1.基础知识了解1.1.2. 工作波段划分
1.2.距离1.2.1.距离的测量PRF:脉冲重复频率&PRI:脉冲重复间隔占空比和相关功率
1.2.2.最大不模糊距离
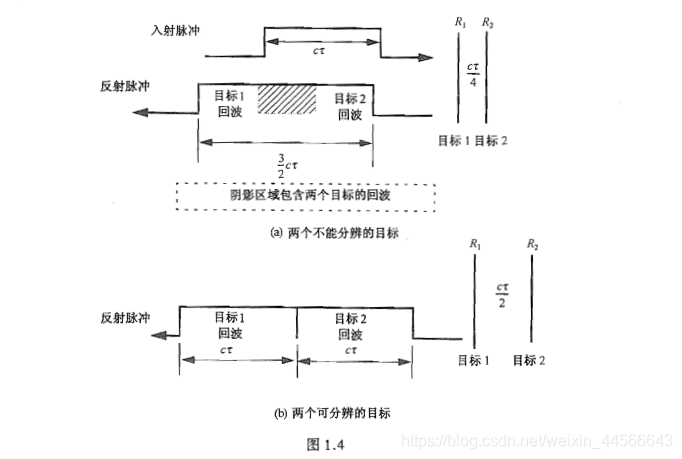
1.3.距离分辨率(1)基本概念描述(2)距离单元门的引入(3)距离单元门宽度的确定(4)脉冲压缩技术的引入
1.4.多普勒频率1.5.雷达方程1.5.1.雷达基本方程1.5.2.噪声和信噪比1.5.2.1.信噪比的仿真(1)matlab实现1.5.2.2.信噪比的仿真(2)matlab实现1.5.2.3.输出信噪比的作用
1.5.3.雷达参考距离
1.6.搜索(警戒)搜索雷达方程天线的波束宽度1.6.1.函数power_aoerture--复现搜索雷达方程(功率孔径积)1.6.2.在实际情况之中分析关系1.6.3.matlab代码实现
1.7.脉冲积累1.7.1.概述1.7.2.相干积累1.7.3.非相干积累1.7.4.脉冲积累的检测距离1.7.5.matlab仿真1.7.5.1.相干积累1.7.5.2.非相干积累1.7.5.3.函数参数了解1.7.5.4.函数的matlab代码1.7.5.5.结果及运用函数的matlab代码
1.8.雷达损失1.8.1.发射和接收损失1.8.2.天线方向图损失和扫描损失1.8.3.大气损失1.8.4.叠加损失1.8.5.处理损失1.8.3.其他损失
1.9. 我的雷达-设计案例研究1.9.1. 前言1.9.2. 问题陈述1.9.3. 设计1.9.4. 备选设计
1.1.雷达分类
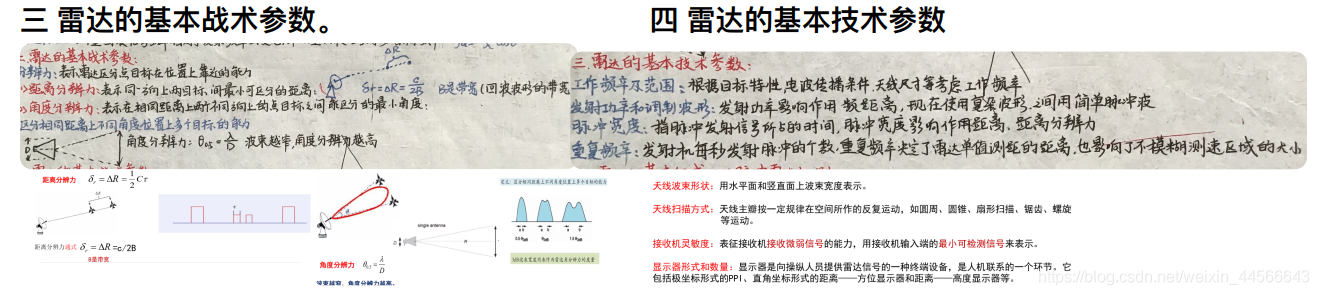
一般来讲,雷达系统是使用调制波形和方向性天线来发射电磁能量到空间的特定区域以搜索目标,在搜索区域内的目标物会反射部分能量(雷达反射信号或回波)回到雷达,然后这些回波被雷达接收机处理,以提取目标的信息,例如距离,速度,角位置和其他目标识别特征 radar-radio detection and ranging CW:连续波雷达 PR:脉冲雷达 低PRF雷达主要用于测距,而对于目标的速度(多普勒频移)不感兴趣 高PRF雷达主要用于测量目标速度
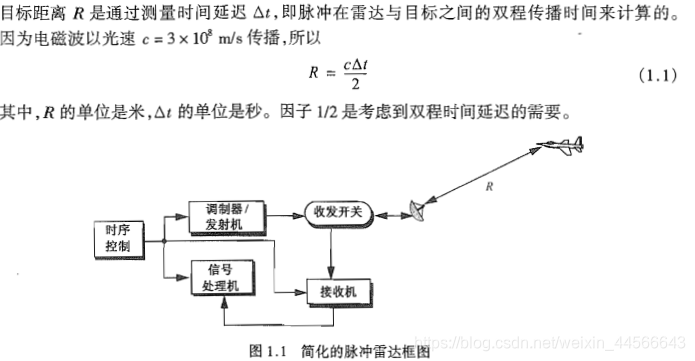
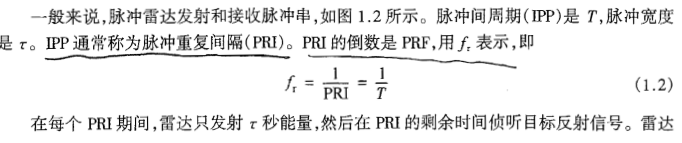
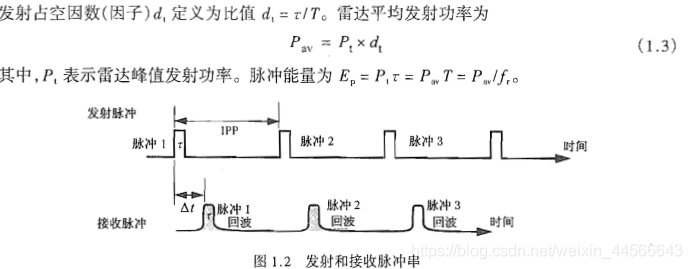
以脉冲雷达为例: 一般来说,脉冲雷达发射和接收脉冲串,自然就会存在脉冲重复间隔 在每一个PRI期间,雷达只会发射tao秒的能量,其余时间用于监听目标回波,则发射信号自然存在一个占空比 最大不模糊距离是对应于双程延迟时间T的距离,雷达发射了一个脉冲,雷达必须等待足够长的时间,以使最大距离处目标的反射信号在下一个脉冲发射前返回,也就是说最大不模糊距离对应半个PRI 距离分辨率描述雷达将相互非常接近的目标检测为不同目标的能力的指标 雷达系统通常设计在最小距离Rmin和最大距离Rmax之间工作,将其之间的距离划分成为M个单元门,每一个距离单元门的宽度就是距离分辨率 确定距离单元门的宽度也就是要确定距离分辨率 一般来说雷达用户和设计者都追求距离分辨率足够小,来增强雷达的性能,要提高雷达距离分辨率就需要使脉冲宽度足够小,然而这样的话,将会减少平均发射功率和增加工作带宽,从而产生矛盾。获得好的距离分辨率的同时维持足够的平均发射功率,就必须要通过使用脉冲压缩技术来实现 1.4.多普勒频率雷达使用多普勒频率来提取目标的径向速度以及区分运动目标和静止目标 多普勒现象描述的是由于目标相对于辐射源的运动而引起的入射波形中心频率的偏移 而根据目标运动的方向,此频移可能是正的,也可能是负的 理解雷达基本方程的推导过程
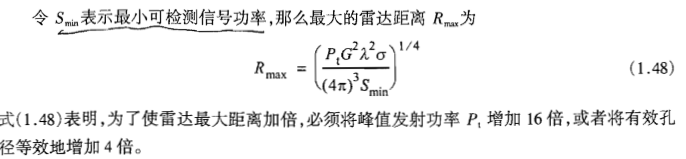
(1)功率谱密度:PSD 在实际情况下,雷达接收的回波信号会被噪声污染噪声本质上是随机的,可以用其功率密谱度来描述,同时噪声功率也是雷达工作带宽的函数 注释:下面的函数用于实现(1.56),即实现雷达距离方程,也就是实现了相关指标都确定,检测距离也确定下来之后的雷达系统所需要的最小输出信噪比SNR 当然:我们也可以修改,对于一组给定的雷达参数,最大可检测距离是所要求的最小可检测SNR的函数,同时也可以修改雷达方程来计算对于给定的检测距离为获得一定的SNR所需要的脉冲宽度  
(2)输入参数举例: 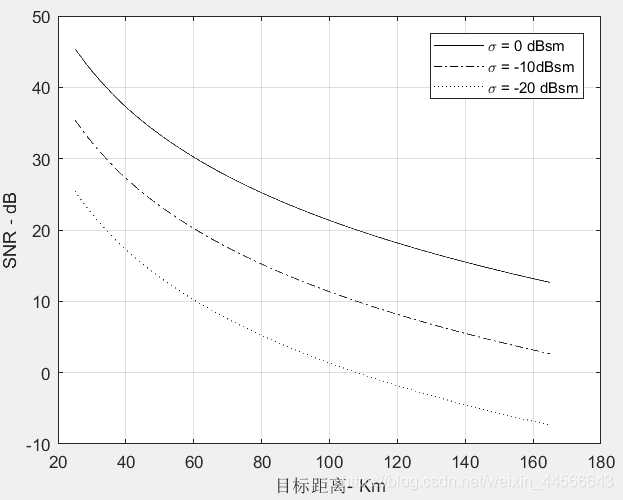 
(3)此部分的matlab代码实现 注意在本程序中用到了上一仿真的函数,此处调用 % 用此程序产生 Fig. 1.12 close all clear all pt = 1.5e+6; % 峰值功率in W freq = 5.6e+9; %峰值功率in W g = 45.0; % 天线增益in dB sigma = 0.1; % 雷达截面积 in m squared te = 290.0; % 有效噪声温度 in Kelvins b = 5.0e+6; % 雷达工作带宽in Hz nf = 3.0; %噪声系数 in dB loss = 6.0; % 雷达损失in dB range = linspace(25e3,165e3,1000); % 雷达目标距离 from 25 Km 165 Km, 1000 points snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range); snr2 = radar_eq(pt, freq, g, sigma/10, te, b, nf, loss, range); snr3 = radar_eq(pt, freq, g, sigma*10, te, b, nf, loss, range); % 画出输出信噪比随目标距离的变化 figure(1) rangekm = range ./ 1000; plot(rangekm,snr3,'k',rangekm,snr1,'k -.',rangekm,snr2,'k:') grid legend('\sigma = 0 dBsm','\sigma = -10dBsm','\sigma = -20 dBsm') xlabel ('目标距离- Km'); ylabel ('SNR - dB'); snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range); snr2 = radar_eq(pt*0.4, freq, g, sigma, te, b, nf, loss, range); snr3 = radar_eq(pt*1.8, freq, g, sigma, te, b, nf, loss, range); figure (2) plot(rangekm,snr3,'k',rangekm,snr1,'k -.',rangekm,snr2,'k:') grid legend('Pt = 2.7 MW','Pt = 1.5 MW','Pt = 0.6 MW') xlabel ('Detection range - Km'); ylabel ('SNR - dB'); 1.5.2.3.输出信噪比的作用(1)当我们求出来输出信噪比的时候,由于最小可检测信号与信噪比线性关系,因此对于一组给定的雷达参数,我们就可以求出对应的信噪比,其中雷达监测门限所对应的输出信噪比就可以带入雷达基本方程求出雷达的最大作用距离(威力范围) 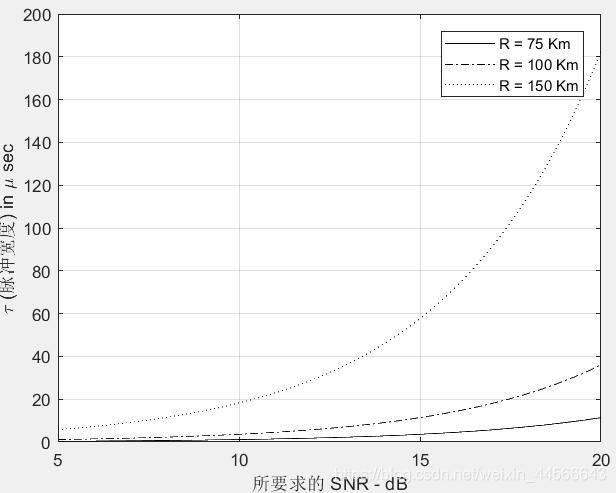  % 用这个程序产生 Fig. 1.13 of text.
close all
clear all
pt = 1.e+6; % 峰值功率in Watts
freq = 5.6e+9; % 雷达的工作频率 in Hz
g = 40.0; %天线增益in dB
sigma = 0.1; % 雷达截面积 in m squared
te =300.0; % 等效噪声温度 in Kelvins
nf = 5.0; %噪声系数 in dB
loss = 6.0; % 雷达损失 in dB
range = [75e3,100e3,150e3]; % 三个不同的探测距离要求
snr_db = linspace(5,20,200); % SNR values from 5 dB to 20 dB 200 points
snr = 10.^(0.1.*snr_db); % convert snr into base 10
gain = 10^(0.1*g); %convert antenna gain into base 10
loss = 10^(0.1*loss); % convert losses into base 10
F = 10^(0.1*nf); % convert noise figure into base 10
lambda = 3.e8 / freq; % 计算波长
% Implement Eq.(1.57)
den = pt * gain * gain * sigma * lambda^2;%各项分母
num1 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(1)^4 .* snr;%各项分子
num2 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(2)^4 .* snr;
num3 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(3)^4 .* snr;
tau1 = num1 ./ den ;
tau2 = num2 ./ den;
tau3 = num3 ./ den;
% 画图
figure(1)
plot(snr_db,1e6*tau1,'k',snr_db,1e6*tau2,'k -.',snr_db,1e6*tau3,'k:')
%因为上面得到的是s,我们要转为us,1e6
grid
legend('R = 75 Km','R = 100 Km','R = 150 Km')
xlabel ('所要求的 SNR - dB');
ylabel ('\tau (脉冲宽度) in \mu sec');
figure(2)
semilogy(snr_db,1e6*tau1,'k',snr_db,1e6*tau2,'k -.',snr_db,1e6*tau3,'k:')
%因为上面得到的是s,我们要转为us,1e6
grid
legend('R = 75 Km','R = 100 Km','R = 150 Km')
xlabel ('所要求的 SNR - dB');
ylabel ('\tau (脉冲宽度) in \mu sec');
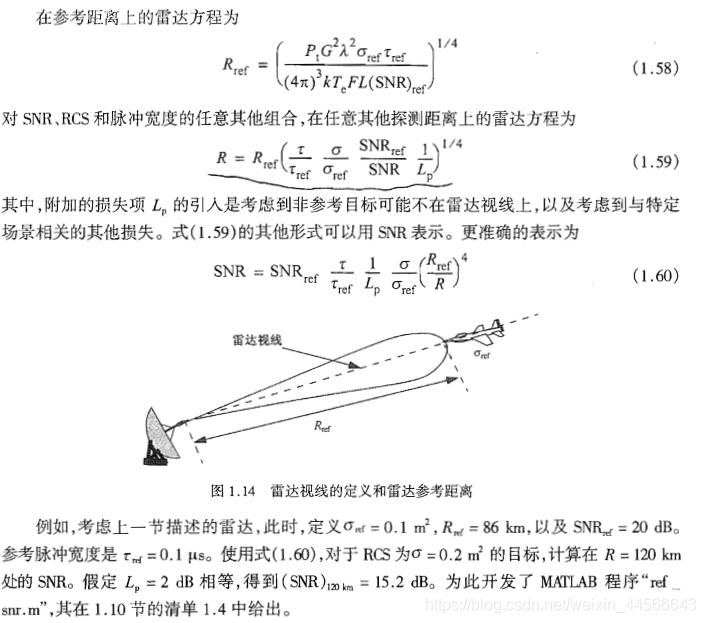
1.5.3.雷达参考距离
% 用这个程序产生 Fig. 1.13 of text.
close all
clear all
pt = 1.e+6; % 峰值功率in Watts
freq = 5.6e+9; % 雷达的工作频率 in Hz
g = 40.0; %天线增益in dB
sigma = 0.1; % 雷达截面积 in m squared
te =300.0; % 等效噪声温度 in Kelvins
nf = 5.0; %噪声系数 in dB
loss = 6.0; % 雷达损失 in dB
range = [75e3,100e3,150e3]; % 三个不同的探测距离要求
snr_db = linspace(5,20,200); % SNR values from 5 dB to 20 dB 200 points
snr = 10.^(0.1.*snr_db); % convert snr into base 10
gain = 10^(0.1*g); %convert antenna gain into base 10
loss = 10^(0.1*loss); % convert losses into base 10
F = 10^(0.1*nf); % convert noise figure into base 10
lambda = 3.e8 / freq; % 计算波长
% Implement Eq.(1.57)
den = pt * gain * gain * sigma * lambda^2;%各项分母
num1 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(1)^4 .* snr;%各项分子
num2 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(2)^4 .* snr;
num3 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(3)^4 .* snr;
tau1 = num1 ./ den ;
tau2 = num2 ./ den;
tau3 = num3 ./ den;
% 画图
figure(1)
plot(snr_db,1e6*tau1,'k',snr_db,1e6*tau2,'k -.',snr_db,1e6*tau3,'k:')
%因为上面得到的是s,我们要转为us,1e6
grid
legend('R = 75 Km','R = 100 Km','R = 150 Km')
xlabel ('所要求的 SNR - dB');
ylabel ('\tau (脉冲宽度) in \mu sec');
figure(2)
semilogy(snr_db,1e6*tau1,'k',snr_db,1e6*tau2,'k -.',snr_db,1e6*tau3,'k:')
%因为上面得到的是s,我们要转为us,1e6
grid
legend('R = 75 Km','R = 100 Km','R = 150 Km')
xlabel ('所要求的 SNR - dB');
ylabel ('\tau (脉冲宽度) in \mu sec');
1.5.3.雷达参考距离
当我们不知道用户的雷达设计情况,我们可以先提供一个参考
两种情况,圆形孔径与锥形孔径 代入的都是db,最后求出来的都是db形式 用于重现搜索雷达方程–计算功率孔径积
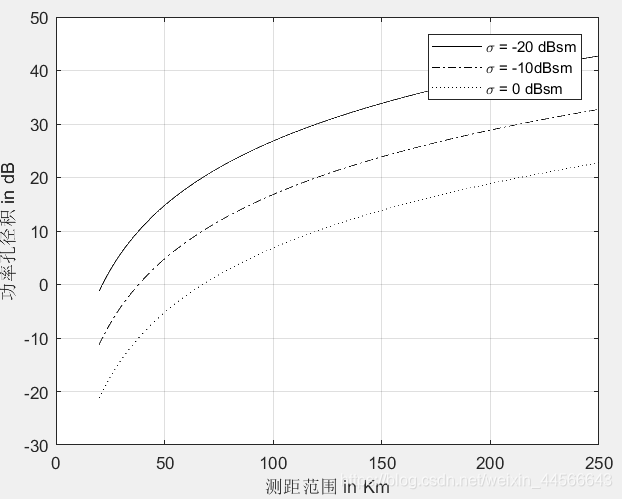  1.6.3.matlab代码实现
close all
clear all
tsc = 2.5; % 扫描时间2.5 seconds
sigma = 0.1; % 雷达截面积in m sqaured
te = 900.0; % 等效噪声温度in Kelvins
snr = 15; % 要求的SNR in dB
nf = 6.0; %噪声系数in dB
loss = 7.0; % 雷达损失 in dB
az_angle = 2; % 搜索区域的方位角范围in degrees
el_angle = 2; %搜索区域的俯仰角范围 in degrees
range = linspace(20e3,250e3,1000); % 检测距离 from 20 Km 250 Km, 1000 points
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
% plot power aperture prodcut versus range
% figure 1.16a
figure(1)
rangekm = range ./ 1000;
plot(rangekm,pap1,'k',rangekm,pap2,'k -.',rangekm,pap3,'k:')
grid
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
xlabel ('测距范围 in Km');
ylabel ('功率孔径积 in dB');
%生成Figure 1.16b
lambda = 0.03; % 波长in meters
G = 45; % 天线增益 in dB
ae = linspace(1,25,1000);%孔径面积 to 25 meter squared, 1000 points
Ae = 10*log10(ae);
range = 250e3; % 感兴趣的距离 is 250 Km
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
Pav1 = pap1 - Ae;
Pav2 = pap2 - Ae;
Pav3 = pap3 - Ae;
figure(2)
plot(ae,Pav1,'k',ae,Pav2,'k -.',ae,Pav3,'k:')
grid
xlabel('孔径面积 in square meters')
ylabel('平均功率 in dB')
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
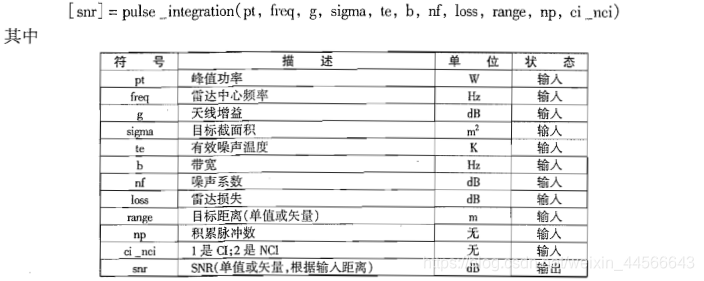
1.7.脉冲积累
1.6.3.matlab代码实现
close all
clear all
tsc = 2.5; % 扫描时间2.5 seconds
sigma = 0.1; % 雷达截面积in m sqaured
te = 900.0; % 等效噪声温度in Kelvins
snr = 15; % 要求的SNR in dB
nf = 6.0; %噪声系数in dB
loss = 7.0; % 雷达损失 in dB
az_angle = 2; % 搜索区域的方位角范围in degrees
el_angle = 2; %搜索区域的俯仰角范围 in degrees
range = linspace(20e3,250e3,1000); % 检测距离 from 20 Km 250 Km, 1000 points
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
% plot power aperture prodcut versus range
% figure 1.16a
figure(1)
rangekm = range ./ 1000;
plot(rangekm,pap1,'k',rangekm,pap2,'k -.',rangekm,pap3,'k:')
grid
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
xlabel ('测距范围 in Km');
ylabel ('功率孔径积 in dB');
%生成Figure 1.16b
lambda = 0.03; % 波长in meters
G = 45; % 天线增益 in dB
ae = linspace(1,25,1000);%孔径面积 to 25 meter squared, 1000 points
Ae = 10*log10(ae);
range = 250e3; % 感兴趣的距离 is 250 Km
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
Pav1 = pap1 - Ae;
Pav2 = pap2 - Ae;
Pav3 = pap3 - Ae;
figure(2)
plot(ae,Pav1,'k',ae,Pav2,'k -.',ae,Pav3,'k:')
grid
xlabel('孔径面积 in square meters')
ylabel('平均功率 in dB')
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
1.7.脉冲积累
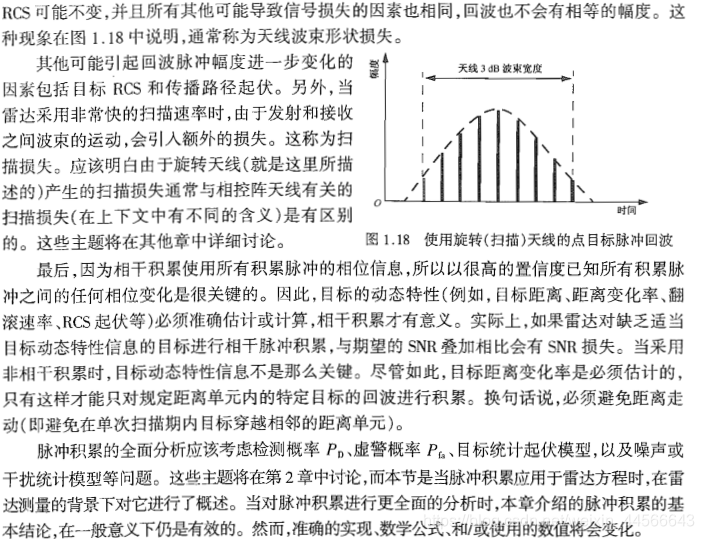
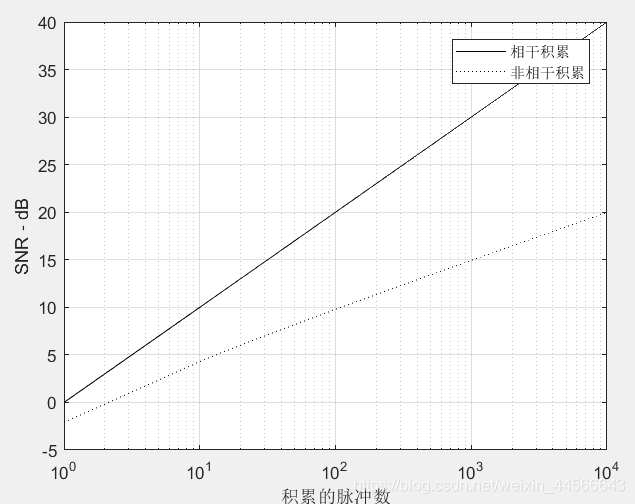
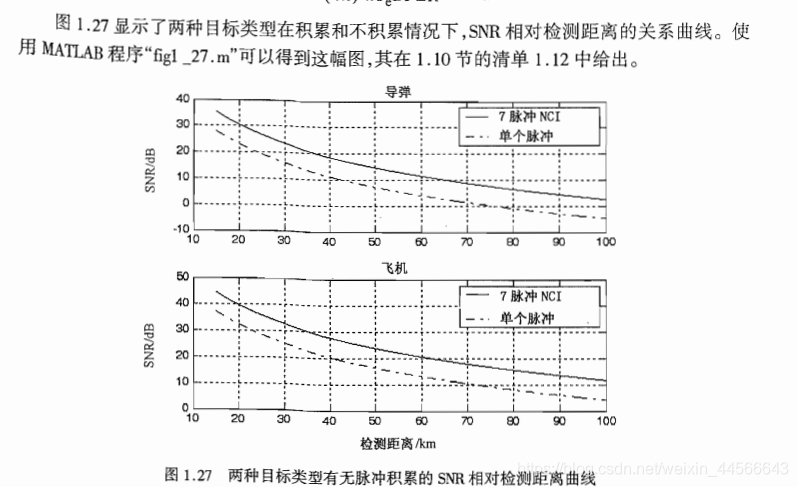
当一个目标在单次扫描期间位于雷达波束内时,它可能会反射好几个脉冲。通过把一个给定目标在单次扫描期间反射的所有脉冲的回波相加,雷达的灵敏度(SNR)就会增加 脉冲回波的相加过程称为雷达脉冲积累,有两种积累方式: (1)脉冲积累可以对包络检波之前积累–相干积累&检波前积累,相干积累保持了接受脉冲之间的相位关系,实现了信号幅度的相加 (2)脉冲积累也可以在包络检波之后完成–非相干积累&检波后积累,相位关系被破坏 1.7.1.概述
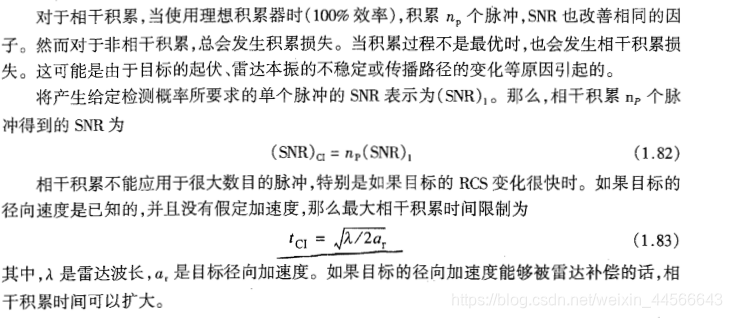
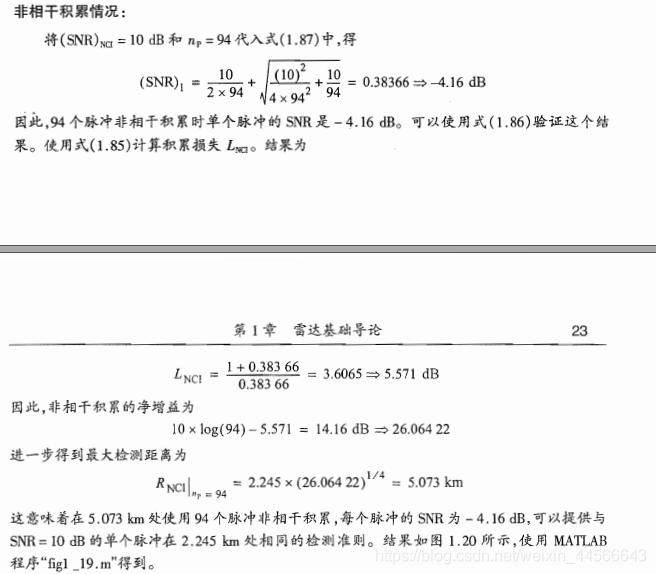
对于相干积累,当使用理想累积器(100%的积累效率)的时候,积累n个脉冲,信噪比也会提高n倍 非相干积累经常在包络检波器之后(也称为正交检波器)实现,非相干积累的积累效果不如相干积累有效 事实上,非相干积累效益总是小于非相干积累脉冲数的 **思考过程: (1)首先确定使用相干积累还是非相干积累 (2)其次确定检测和跟踪所足够要求的最小SNR (3)确定应该积累多少脉冲n,n的选择受雷达扫描速率,雷达PRF,天线波束宽度等指标控制 (4)最后使用SNR计算雷达监测距离 ** 当使用相同的SNR时,我们可以看到,由于积累使得SNR减小,雷达监测距离比单个脉冲的大
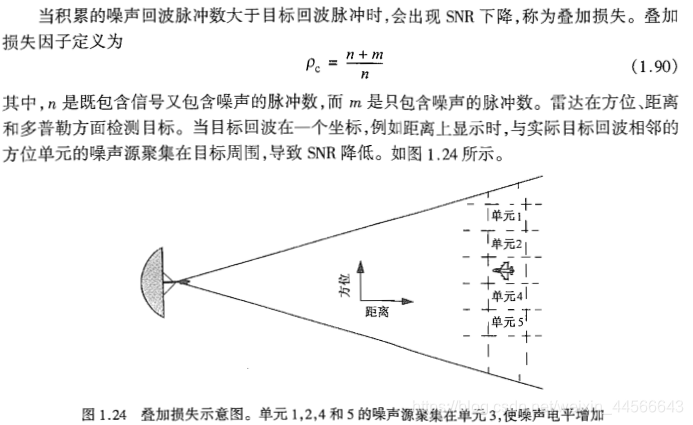
当积累的噪声回波脉冲数大于目标回波脉冲数的时候,就会出现SNR的下降,出现叠加损失 算法和硬件的处理会导致损失
只用本章的知识来满足设计需求,当后续章节引入新的知识之后,我们可以进行设计的更新,适应不同章节的理论和技术 1.9.1. 前言这是一部地基防空雷达 采用的设计方法是基于对很多雷达系统组件的建模,不考虑任何硬件的约束和任何实际限制 1.9.2. 问题陈述
**(1)距离分辨率-脉冲宽度/等效出要求的工作带宽,在这个地方要确定雷达的工作频率,孔径大小,单个脉冲峰值功率 **
|






 那么这步做完就相当于进行了分出来了一个个距离单元条
那么这步做完就相当于进行了分出来了一个个距离单元条


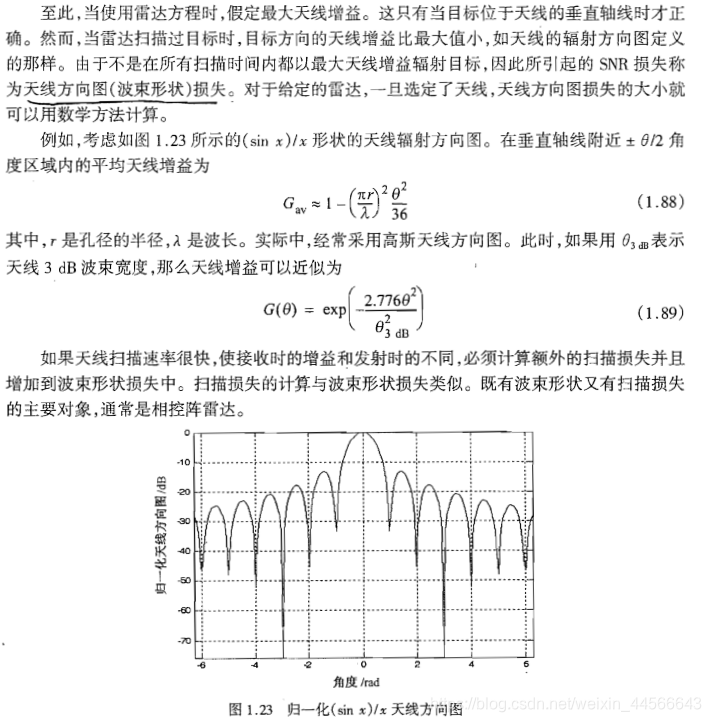
 注意:多普勒频移的大小依赖于在雷达方向上的目标速度分量,也就是径向速度。 这三个目标都具有速度,但是多普勒频移很不一样,目标一产生0多普勒频移,目标二产生最大多普勒频移,目标三产生多普勒频移在两者之间
注意:多普勒频移的大小依赖于在雷达方向上的目标速度分量,也就是径向速度。 这三个目标都具有速度,但是多普勒频移很不一样,目标一产生0多普勒频移,目标二产生最大多普勒频移,目标三产生多普勒频移在两者之间








 (2)信噪比及改写雷达方程
(2)信噪比及改写雷达方程 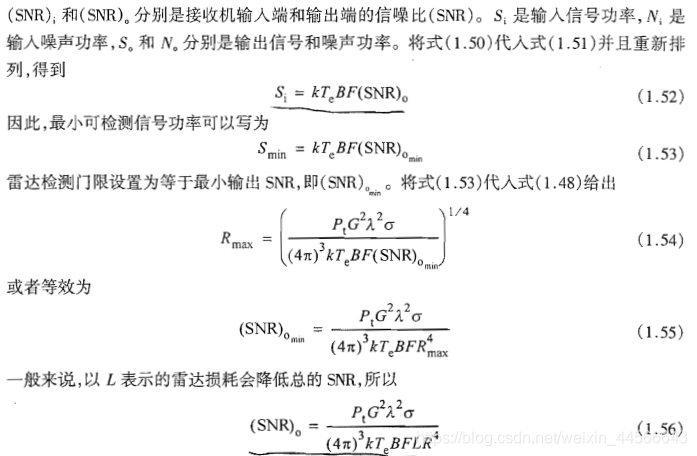
 (1)相关基础参数解释
(1)相关基础参数解释 (3)matlab代码编写函数 注意我们通常使用分贝计数来执行与雷达方程有关的计算
(3)matlab代码编写函数 注意我们通常使用分贝计数来执行与雷达方程有关的计算 (2)可以修改雷达方程来计算对于给定的检测距离为获得一定的SNR所需要的脉冲宽度
(2)可以修改雷达方程来计算对于给定的检测距离为获得一定的SNR所需要的脉冲宽度 






 注意我们重现的实际上是功率孔径积,功率孔径积的研究很有价值
注意我们重现的实际上是功率孔径积,功率孔径积的研究很有价值 复现搜索雷达–复现为功率孔径积的形式
复现搜索雷达–复现为功率孔径积的形式 







 在雷达方程中指出,接收机SNR与雷达损失成反比,任何雷达损失的增加都会导致SNR的降低
在雷达方程中指出,接收机SNR与雷达损失成反比,任何雷达损失的增加都会导致SNR的降低 




 在这个地方我们有必要把重点指标再次强调一下 (1)相应的雷达截面积已经给出(2)扫描速度(3)距离分辨率(4)噪声系数(5)接收机损失(6)合理的检测门限(最小可检测信噪比)
在这个地方我们有必要把重点指标再次强调一下 (1)相应的雷达截面积已经给出(2)扫描速度(3)距离分辨率(4)噪声系数(5)接收机损失(6)合理的检测门限(最小可检测信噪比)









【本文地址】