| (二十九)雷达坐标系及坐标变换知识总结 | 您所在的位置:网站首页 › 雷达二十九团 › (二十九)雷达坐标系及坐标变换知识总结 |
(二十九)雷达坐标系及坐标变换知识总结
|
0 写在前面 在学习雷达过程中,最重要的是几何建模和信号处理,几何模型会影响斜距的表达式,进而影响信号的形式(时延和相位)。几何建模中会涉及到坐标变换的基础知识。在实际工程和仿真中,都是非常重要的。本节将重点介绍雷达相关的坐标系定义,及其坐标变换关系,为最终的雷达回波仿真和实测数据处理打下基础。关于坐标变换的数学原理可参考。 1 坐标系介绍物体的位置、角度、速度都是相对观测坐标系(地面坐标系、北天东坐标系),角速度等相对自身坐标系。 1.1 目标坐标系雷达的重要作用是观测目标,通常目标运动(自身刚体运动)特性在目标坐标系中描述。坐标原点在目标质心处。如下图所示。  目标的三个姿态角偏航(Yaw)、俯仰(Pitch)和横滚(Roll)分别代表绕Z、X和Y轴的旋转角度(地面坐标系下)。如下图所示。  形成姿态角的三种运动分别如下图所示。  Yaw Yaw Pitch Pitch Roll1.2 地面坐标系 Roll1.2 地面坐标系地面坐标系的原点一般为雷达所在位置或火力单元位置,如下图所示。  1.3 北天东坐标系 1.3 北天东坐标系即北、天和东分别为坐标轴的X、Y和Z轴,如下图所示。  1.4 平台坐标系 1.4 平台坐标系若雷达在运动平台上,如飞机、导弹等,平台运动一般在平台坐标系中描述。飞机的姿态角(偏航、俯仰和横滚)是在大地坐标系下定义和描述的。 1.5 天线坐标系天线坐标系原点在平台上的某个位置,通过平台坐标系方位和俯仰(角)旋转得到。若为正前视,则与平台坐标系一致。 1.6 其他还会有其他一些坐标系,如阵面坐标系、地理坐标系、大地坐标系等,这里不再一一介绍,本节主要利用以上5种进行雷达回波的仿真。 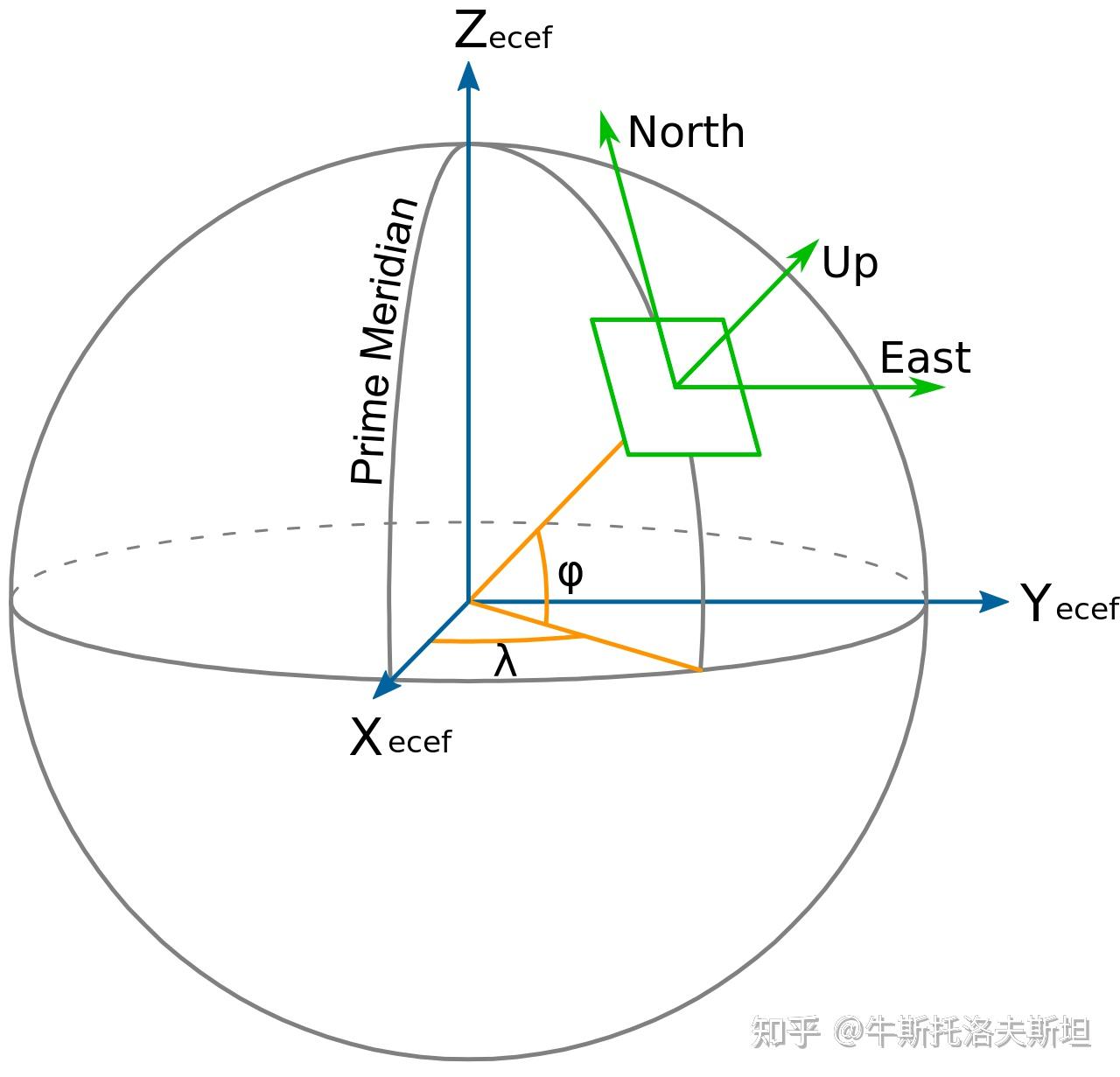 The east north up (ENU) local tangent plane is similar to NED, except for swapping 'down' for 'up' and x for y.2 坐标转换2.1 目标坐标系到地面坐标系 The east north up (ENU) local tangent plane is similar to NED, except for swapping 'down' for 'up' and x for y.2 坐标转换2.1 目标坐标系到地面坐标系若目标的姿态角分别为\phi,\theta和\gamma分别对应偏航、俯仰和横滚产生的角度,P_0为目标在地面坐标系的坐标,则有目标点在地面坐标系中的坐标为 P' = R_x(\gamma)R_y(\theta)R_z(\phi)\times P + P_0\tag{1} 其中: R_{tg}=R_x(\gamma)R_y(\theta)R_z(\phi) = \left[ {\begin{array}{*{20}{c}} 1&0&0\\ 0&{\cos \gamma }&{\sin \gamma }\\ 0&{ - \sin \gamma }&{\cos \gamma } \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\cos \theta }&0&{ - \sin \theta }\\ 0&1&0\\ {\sin \theta }&0&{\cos \theta } \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\cos \phi }&{\sin \phi }&0\\ { - \sin \phi }&{\cos \phi }&0\\ 0&0&1 \end{array}} \right] \tag{2} 2.2 地面坐标系到北天东坐标系由定义可知,此转换相当于沿Y轴旋转90度,再沿Z轴旋转90度,可以得到如下变换: P' = R_z(90^\circ)R_y(90^\circ)\times P \tag{3} 其中: R_{ge}=R_z(90^\circ)R_y(90^\circ) = \left[ {\begin{array}{*{20}{c}} 0&1&0\\ { - 1}&0&0\\ 0&0&1 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&0&{ - 1}\\ 0&1&0\\ 1&0&0 \end{array}} \right]{\rm{ = }}\left[ {\begin{array}{*{20}{c}} 0&{\rm{1}}&{\rm{0}}\\ 0&{\rm{0}}&{\rm{1}}\\ 1&0&0 \end{array}} \right] \tag{4} 2.3 北天东坐标系到平台坐标系根据平台的三个姿态角偏航角\psi、俯仰角\theta和横滚角\gamma,平台位置为P_1,则有 P' = R_x(\gamma)R_z(\theta)R_y(\psi)\times P - P_1 \tag{5} 其中: R_{eb}=R_x(\gamma)R_z(\theta)R_y(\psi) \\ \begin{array}{c} = \left[ {\begin{array}{*{20}{c}} 1&0&0\\ 0&{\cos \gamma }&{\sin \gamma }\\ 0&{ - \sin \gamma }&{\cos \gamma } \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\cos \theta }&{\sin \theta }&0\\ { - \sin \theta }&{\cos \theta }&0\\ 0&0&1 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\cos \psi }&0&{ - \sin \psi }\\ 0&1&0\\ {\sin \psi }&0&{\cos \psi } \end{array}} \right]\\ {\rm{ = }}\left[ {\begin{array}{*{20}{c}} {\cos \theta }&{\sin \theta }&0\\ { - \cos \gamma \sin \theta }&{\cos \gamma \cos \theta }&{\sin \gamma }\\ {\sin \gamma \sin \theta }&{ - \sin \gamma \cos \theta }&{\cos \gamma } \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\cos \psi }&0&{ - \sin \psi }\\ 0&1&0\\ {\sin \psi }&0&{\cos \psi } \end{array}} \right]\\ {\rm{ = }}\left[ {\begin{array}{*{20}{c}} {\cos \theta \cos \psi }&{\sin \theta }&{ - \cos \theta \sin \psi }\\ { - \cos \gamma \sin \theta \cos \psi {\rm{ + }}\sin \gamma \sin \psi }&{\cos \gamma \cos \theta }&{\cos \gamma \sin \theta \sin \psi {\rm{ + }}\sin \gamma \cos \psi }\\ {\sin \gamma \sin \theta \cos \psi {\rm{ + }}\cos \gamma \sin \psi }&{ - \sin \gamma \cos \theta }&{ - \sin \gamma \sin \theta \sin \psi {\rm{ + }}\cos \gamma \cos \psi } \end{array}} \right] \end{array} \tag{6} 2.4 平台坐标系到天线坐标系设天线与平台坐标系下的俯仰角和方位角分别为\alpha和\beta,天线中心坐标为P_2,则有如下变换 P' = R_y(\beta)R_z(\alpha)\times P - P_2 \tag{7} 其中: R_{ba}=R_y(\beta)R_z(\alpha)\\ \begin{array}{l} = \left[ {\begin{array}{*{20}{c}} {\cos \beta }&0&{ - \sin \beta }\\ 0&1&0\\ {\sin \beta }&0&{\cos \beta } \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\cos \alpha }&{\sin \alpha }&0\\ { - \sin \alpha }&{\cos \alpha }&0\\ 0&0&1 \end{array}} \right]\\ = \left[ {\begin{array}{*{20}{c}} {\cos \beta \cos \alpha }&{\cos \beta \sin \alpha }&{ - \sin \beta }\\ { - \sin \alpha }&{\cos \alpha }&0\\ {\sin \beta \cos \alpha }&{\sin \beta \sin \alpha }&{\cos \beta } \end{array}} \right] \end{array} \tag{8} 2.5 目标坐标系转天线坐标系最终的目标就是将目标转换到天线坐标系,从而计算天线增益等参数,联立以上可公式得到转化公式为 P' = R_{ba}(R_{eb}(R_{ge}(R_{tg}\times P +P_0)-P_1)-P_2) \tag{9} 3 仿真分析目标散射点模型,采用茶壶,具体可参考。 3.1 目标坐标系旋转目标旋转相当于坐标系逆旋转,方位、俯仰喝横滚角都选择45^\circ,则变换结果如下图所示。  3.2 目标到天线坐标系 3.2 目标到天线坐标系这里仿真式9。参数:平台坐标系原点在北天东坐标系坐标(0,10,0), 目标原点在地面坐标系(100,100,0),平台和天线都偏航45^\circ。仿真结果如下图所示。 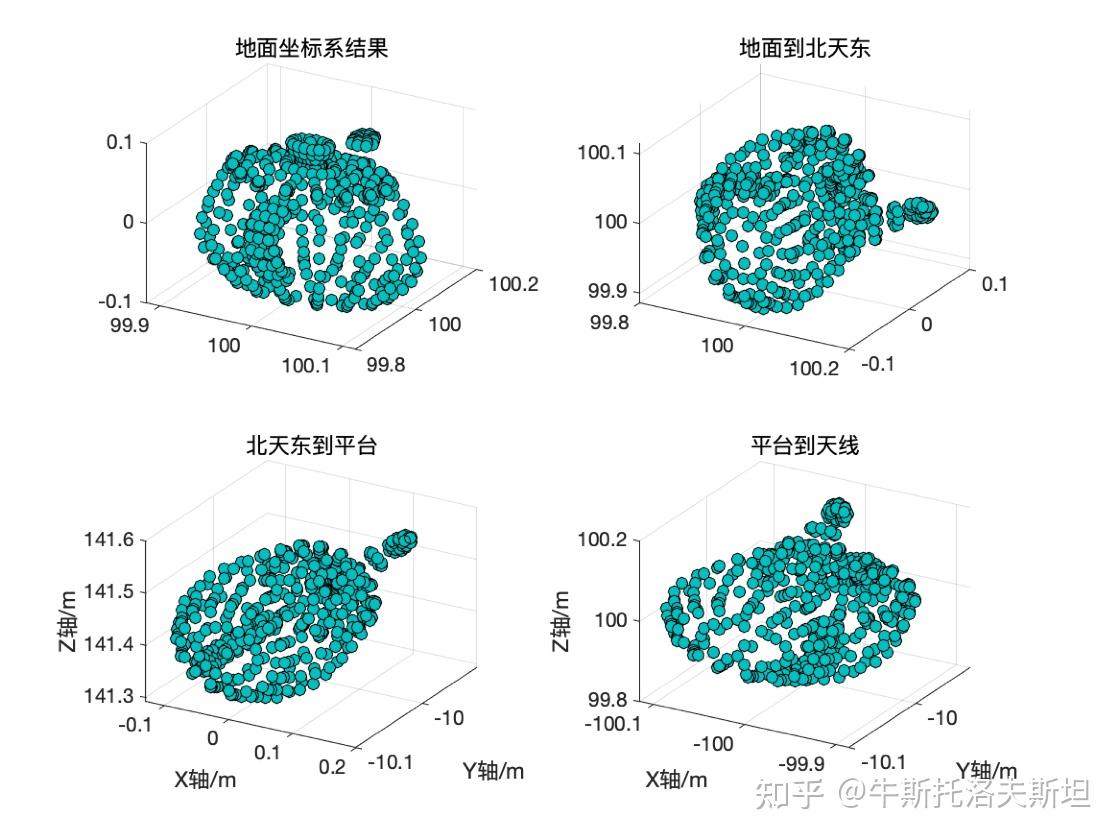 3.3 雷达回波仿真 3.3 雷达回波仿真得到了天线坐标系下目标坐标,结下来可以仿真回波,可参考。 4 总结讨论本节主要介绍了雷达常用到的坐标系及其坐标变换,方针结果可以对照分析结果 的正确性,来理解坐标变化。这里需要特别注意的是,坐标旋转相当于坐标不动目标的反方向旋转,这在坐标变换中极为重要!!! 5 参考文献【1】维基百科 |
【本文地址】