| KUKA机器人故障报警信息处理(一) | 您所在的位置:网站首页 › 除灰机器人报警怎么办 › KUKA机器人故障报警信息处理(一) |
KUKA机器人故障报警信息处理(一)
|
1、KSS00276 机器人参数不等于机器人类型 ①登录专家模式 ②示教器操作:【菜单】—【显示】—【变量】—【单个】 ③名称输入:$ROBTRAFO[] 新值:TRAFONAME[] ④点击【设定值】。
2、电池报警:
②“充电电池或电池保险丝损坏-无法缓存” 分析:这种情况一般是机器人首次开机时出现的,机器人出厂时没有将蓄电池的插头插在控制柜内的 CCU 板卡上。 措施:找到控制柜内的蓄电池电源插头,插到对应标签的 CCU板卡插口上。
3、KSS00203-全部运行开通
措施: ①【主菜单】—【配置】—【输入/输出端】—【外部自动运行】下; ②在【输入端】找到$MOVE_ENBALE 对应的通道改为1025。如果在外部自动运行状态下,就检查 PLC 端对应的这个信号有没有给。
4、KSS00308 卸码垛模式:将轴 A5+移到位
措施: ①登录专家模式 ②示教器操作:【菜单】—【显示】—【变量】—【单个】 ③名称输入:$pal_mode 新值:true ④点击【设定值】更新 ⑤重启控制柜。
5、KSS15012 确认开关损坏
温馨提示:在同名公众号上可以查看更多机器人技术内容。
|
 ①“充电电池警告-发现老化的蓄电池,但电量仍然足够”
①“充电电池警告-发现老化的蓄电池,但电量仍然足够”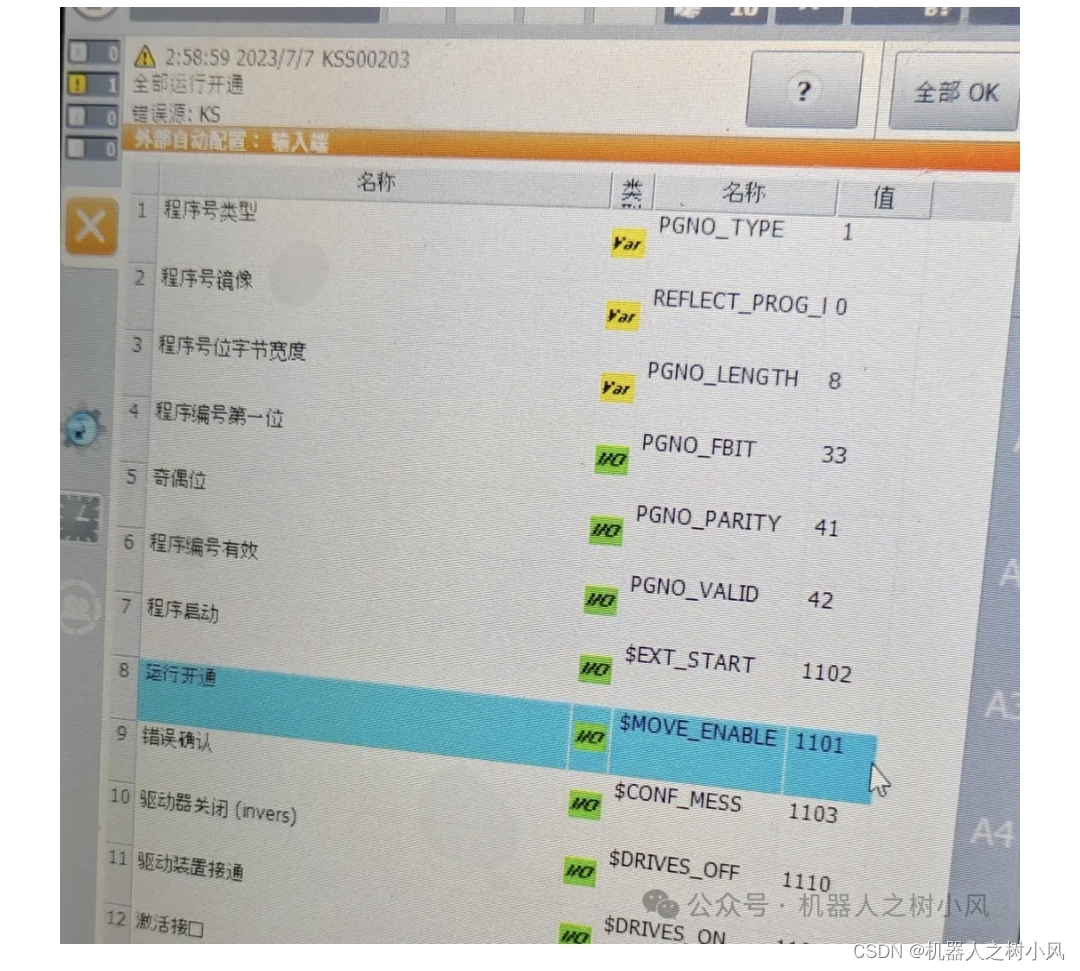
 分析:示教器使能键分三个档位: ①正常不按时为一个档位; ②正常上电移动机器人时,第二个档位; ③按到底时第三个档位,会出现安全停止的报警。 处理:将使能键按到底,会出现“确认开关故障”的确认信息,点击“OK”即可。
分析:示教器使能键分三个档位: ①正常不按时为一个档位; ②正常上电移动机器人时,第二个档位; ③按到底时第三个档位,会出现安全停止的报警。 处理:将使能键按到底,会出现“确认开关故障”的确认信息,点击“OK”即可。【本文地址】
公司简介
联系我们