| 无人机航测方案设计 | 您所在的位置:网站首页 › 钢板弹簧设计的问题 › 无人机航测方案设计 |
无人机航测方案设计
|
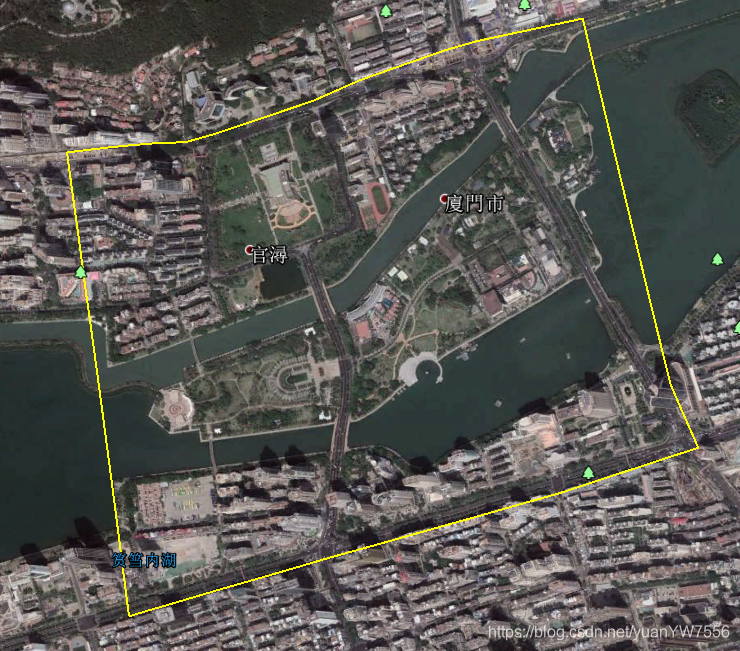
主要工作内容 利用无人机数码航空摄影技术手段完成厦门筼筜湖周边地区,总面积约1.64平方公里,获取筼筜湖畔范围内约1.64平方公里真彩数码航片,获取筼筜湖畔范围内约1.64平方公里1:1000数字线划图(DLG),生产数字高程模型(DEM),生成厦门筼筜湖周边地区数字正射影像图(DOM),地面分辨率优于0.1m的,成图比例尺满足1:1000的大比例尺航空影像工作任务。区域平均海拔高度约为10m,如下图1所示为测区谷歌影像。
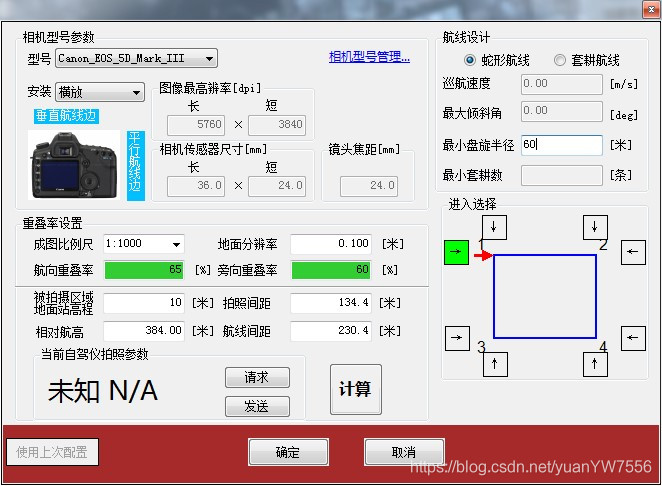
技术方案 (1)航空摄影:本次航摄资料利用大疆无人机搭载高分辨率数码相机拍摄。按照1:1000比例尺成图要求及无人机飞行相关要求设计飞行实施。 (2)像片控制测量:利用厦门CORS系统,采用RTK测量或双频接收机双参考站模式按快速静态方式施测。 采用区域网布点法,按照4-5条基线,逐条航线布设平高像片控制点的原则进行布点。 选刺执行GB/T7931-2008《1:500 1:1000 1:2000航空摄影测量外业规范》; 像控点的测量执行GB/T18314-2009《全球定位系统(GPS)测量规范》和CH/T2009-2010《全球定位系统实时动态测量(RTK)技术规范》。 (3)高程点测量:按照每幅图10-15个点全野外进行实测,内业编辑上图。 (4)调绘参照GB/T7931-2008《1:500 1:1000 1:2000航空摄影测量外业规范》执行。图式符号执行GB/T 20257.1-2007《1:5001:1000 1:2000地形图图式》。 航空摄影技术参数设定 基本参数确定 航线设计需要确定的基本参数有重叠度、航摄比例尺、测区平均基准面、摄影机的焦距、影像的像幅大小。由基本参数计算出航线设计的参数有:在基准面上的飞行高度、航线位置、航向角及航线数、曝光的时间间隔、每条航线的曝光数、总曝光数。 (1)重叠度 重叠度包括航向重叠度和旁向重叠度,航向重叠60%-65%;旁向重叠30%-35%。航线设计是参照平均基准面进行的,地面起伏、影像倾斜角、飞行偏离航线、航高和地速变化等对重叠度均有影响。在航线规划时,可以预先考虑修正的是由地形起伏引起的变化,地形起伏对重叠度的影响不容忽视。地形起伏的高差对重叠度的影响如下式给出: Px =P´x +(1- P´x)·∆h/H (5-1)Py = Py + (1- P´y)·∆h/H Px为考虑地形起伏影响时,航向重叠度实际值;P'X为航向重叠度理论值;Py为考虑地形起伏影响时,旁向重叠度实际值;P'y为旁向重叠度理论值;H为飞行的相对高度(相对基准面的高度,选取基准面);∆h为测区地形相对基准面的变化值。 (2)航摄比例尺 航摄像片的比例尺是航空摄影的一个最基本的集合要素,是指像片上的一个单位距离所代表的实际地面距离,表示为: m = p/GSD (5-2)m为航摄比例尺;GSD为影像地面分辨率;p为单位像元大小。实际摄影比例尺在像片上处处不相等,一般采用平均比例尺表示: m平均= f/H (5-3)f为摄影机的焦距;H为飞行的相对高度。 (3)测区基准面确定 一般情况下航测作业的基准面并非平均海面,通常需要根据测区地形特点选定的一个平面作为基准面。 h基 =(h高 + h低) (5-4)h基为平均基准面高度;h高为区域内最高点的平均高程;h低为区域内最低点的平均高程。 航线设计参数 航拍飞行计划参数设置如图所示。航摄区域要生成航摄航线,必须进行航拍参数的设置。相机型号选择Canon_EOS_5D_Mark_Ⅲ,安装方式选择横放,以及任务作业时的成图比例尺为1:1000,地面站分辨率为0.1米,航向重叠率为65%和旁向重叠率60%。通过上述的参数进行自动计算出拍照间距134.4米、航线间距230.4米和相对航高384米,输入被拍摄区域地面高度约10米。最后选择航线飞行进入方向。 建立的航摄飞行计划中,航拍规划区域以外的航线延伸点为设置的转弯引导点,其位置是根据设置的最小转弯半径和航线间距生成的,目的是为更平滑的切换工作航线,本次设计最小盘旋半径为60米。航拍参数设置如图5-1所示。
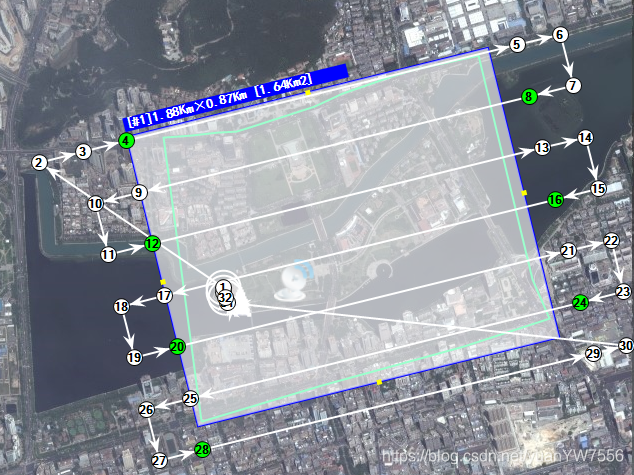
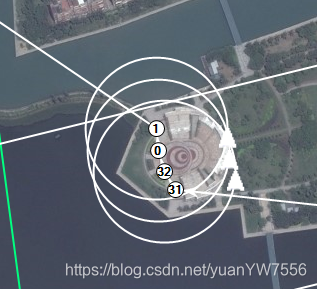
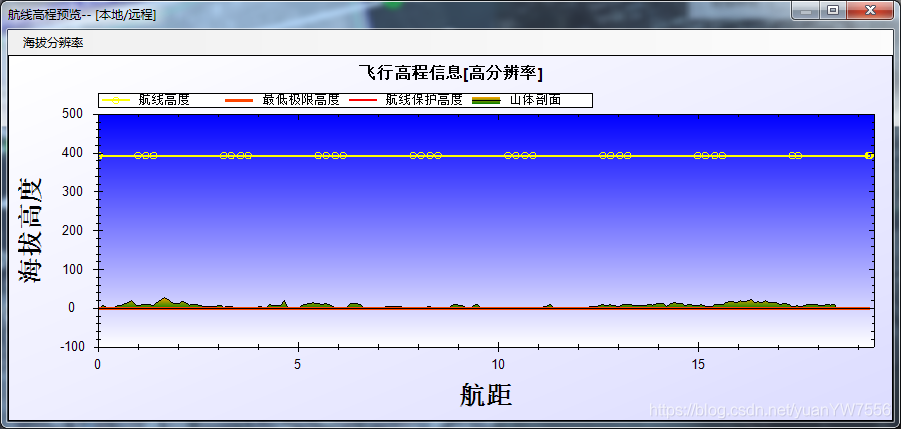
飞行计划参数设置完成后,自动生成针对本区域的航摄飞行计划,如图5-2所示。 但起飞点和降落点需要调整。在生成的航摄飞行计划中,有四个点具有特殊意义,其中0点为设置的应急航路点点,其高度设置为作业航线高度,放置在地面站附近,并设置成无限盘旋属性;1点为航摄起飞高度修正点,其高度与航摄工作面高度一致,当无人机由垂转平后,将首先向1点导航,并将在1点进行盘旋爬升,直到高度到达任务航线高度,导向2号航路点;图中31、32点表示生成的最后两个航路点,其中31点为返航预回收点,其高度与航摄工作面高度一致,为航摄任务完成后的返航点,而32点为降落前调整点,如图5-3所示。 航线设计一般应沿东西方向进行。考虑到学院地形的高程变化不大且范围较小,测区矩形范围偏东北-西南方位,因此本次航线设计总体以东西方向进行,航线偏向东北-西南,航带规划示意图如下图5-4。 在飞行计划规划过程中,用户需要对飞行环境进行全方面考虑,其中飞行计划沿途的地形(高程)对飞行器的安全飞行尤其重要,飞行计划须避开可能存在的山峰地貌。如图5-5所示,点击离线高程预览后,图中黄色曲线为飞行计划各航路点高度曲线,其可与高度曲线相对照。
像控点布设 像控点测量是指根据像片上内业的布点方案,在实地根据影像的灰度和形状找到并确定像控点的位置,测量并记录该点平面坐标及其高程。目前像控作业基本采用GPS进行测量,GPS定位技术以其灵活方便、作业周期短、劳动强度低等优点广泛应用于诸多测绘领域,极大地提高了工作效率。但是像控数据的载体却仍旧停留于纸质。不少作业单位在外业像控点测量时,仍旧是由作业人员拿着纸质相片到野外根据设计的位置选点、测量, 然后在相片上刺点,并在相片反面绘制点位略图和点位说明。这样的工作模式会产生一系列的问题:(1)相片存在着洗印成本,查找和管理均不便。(2)不同的作业小组有可能会用到同一张相片,存在受相片资源限制,影响工作进度。(3)纸质的影像,不可能放得很大,影像细节常常难以辨认,影响刺点精度,甚至导致返工。同时也会带来内业判读的不便。(4)作业小组回到室内还需要重辨认、绘制,产生了重复劳动的中间环节, 也增加了成果质量不高的风险。为了解决以上问题,通过实行航测外业作业数字化,以节约成本,简化作业流程,提高成果精度,真正达到航测内外业一体化的目的。 像控点的点位和目标要求 在内业设计阶段,对像控点的位置选取有比较严格的要求,要求平面点位选取在影像清晰的明显地物点、接近正交的线状地物交点、地物拐角点或固定的点状地物上,高程点选在局部高程变化小且点位周围相对平坦的地区,平高控制点则选在同时满足平面和高程点的要求,像控点在相邻像片上均清晰可见,并选择最清晰的一张作主刺片。内业设计人员通过软件,打开指定的影像以及相邻像片,进行布点设计,建立点号与相关像片的结合图表关系;外业工作人员携带平板电脑到外业,软件自动依据点号,打开相关像片,测量完成后,直接在软件的影像上刺点以及录入点位详细信息;最后将保存的像控点数据提交内业,做加密。 像控点的布设利用厦门CORS采用区域网布设,选刺执行CH/Z 3004-2010《低空数字航空摄影测量外业规范》;像控点的测量执行CH/T2009-2010《全球定位系统实时动态测量(RTK)技术规范》,高程采用GPS拟合高程。 控制点如布在道路上,可用红漆画红十字;如布设在泥地,则需要用腻子粉画设。所有控制点均采用GPS-RTK方式测量,坐标系统为厦门92坐标系,平面精度和高程精度需满足制作1∶1000 DOM的要求。 在内业,大致绘制确定像控点布设位置,实际点位需外业布设量测。如图6-1为在谷歌影像上初步选取的控制点,增删、最终确定待外业根据实际情况确定。
|



【本文地址】