| 纯干货!阿里安全谢君:如何黑掉无人机 | 您所在的位置:网站首页 › 遥控器怎么配对无人机 › 纯干货!阿里安全谢君:如何黑掉无人机 |
纯干货!阿里安全谢君:如何黑掉无人机
|
在研究 IOT 设备时谈到最多的词就是能否 root 这台设备,root 设备意味着可以获得系统很高的控制权。为什么要 root 无人机?目的是扩大攻击面,更好的研究无人机。 而在研究的过程中,我们发现 root 无人机最好的办法是利用合适的漏洞,执行打开 Adb 接口功能,就能得到系统的 root shell 了。如果没有漏洞该怎么办?有意思的是我们发现不用漏洞也可以 root 无人机。 其实此方法可以运用到诸多领域,比如某些路由器。研究过程中我们发现启动脚本里有一个变量控制 ADB 功能能否打开,默认出厂 ADB 不能打开。ADB 功能接口在安卓手机应用广泛,怎样打开此 ADB 功能,一种是利用漏洞执行 ADB_en.sh 的脚本,另一种方法是直接修改该启动脚本的变量。 同样,我们不通过漏洞的方式 root 无人机,因为安卓系统存在三星 EMCP 里面,是集内存和存储于一体的 EMCP 芯片,如果我们可以修改这个芯片里面的内容就可以直接root无人机了。
具体操作步骤是:首先找到这块存储芯片的位置,用电热风枪把它吹下来,然后用 eMMC的读书卡读取内容,此时即找到 eMMC 读卡器,把 eMMC 插到电脑可以看到一个弹出显示存储器里面的空间和内容,找到设置调试变量的地方,修改后再写到 eMCP 里面焊回来。 有一个小细节是,因为存储器里的内容有分区,需要将这些系统分区用 Ext4 的方式挂载,修改后保存,再剪辑切回 EMCP 的芯片里,后续我们需要把它焊回去。再运行直接 ADB 打开,就可以得到 root 权限,成功后可以看到它的系统信息和进程。 这一过程涉及到许多复杂问题,比如要手工脱焊和焊接的过程,此芯片是 BGA 封装,引脚多,引脚间距小,且芯片底座里面人为灌入黑胶,对操作过程带来很大不便,操作不当易使芯片废掉,手工操作难度极高。 飞控系统 飞控系统,是无人机里面的核心。因为会搜集到无人机各个传感器模块的一系列数据,通过一些综合算法来判断飞控系统应该如何操作。
飞控系统核心芯片是 ATSAME70Q21,其不需要外置存储器存储它的部件以及算法,与之相关有两块 IMU 陀螺仪以及加速度计,检测飞机处于什么状态。 气压计,主要为了检测飞机的高度,作为一个飞机高度的判断因素。 Ublox GPS模块,是一个可编程的模块,因为飞控和 GPS 通讯有一个协议交互,并不是说任何一个 GPS模块都可以替换它,但可以做一些欺骗 GPS 的事情。 指南针模块,主要用于方向的定位。 智能电源,智能电源是用德州仪器 MSP430G2755 16 位的微控制芯片,它主要是收集电源现在状态,保持了何时放电,何时通过飞控系统在电量低于某值时返航。 电调芯片,因为无人机有四个螺旋桨,四个马达,每一个马达需要一个电调的芯片控制转速,控制不同的马达的转速,来达到控制飞行姿态以及速度的操作。 视觉系统 视觉系统,这是无人机里面非常重要的功能,里面核心处理芯片是英特尔的 MA2155 深度学习处理芯片。
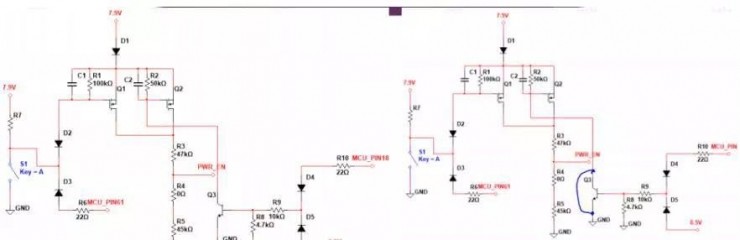
飞机搭载摄像头首先可以进行视频录制、拍照,图像内容输出给视觉处理芯片来完成视觉识别等功能,其中一个功能是飞行跟随,即在手机屏幕上选点跟随飞行的目标,无人机可以跟随他/它飞行,此时时候就利用芯片强大的深度学习能力,对感兴趣的区域进行识别。 还有一个功能是测距,通过 MA2155 这块深度学习芯片来完成视觉测距的功能,飞机前后障碍物的距离通过图象识别的方式识别出来。 另一个功能是双目避障,这是观测倾斜度 70 度是否有障碍物,通过发射端发射出去的光反射回来在接收端接受。 超声波可检测下方障碍物以及检测地面。 无线通信系统架构 无线通讯,是无人机里面最核心的一块功能,也是最复杂的一块功能,涉及到控制系统和图象传输。基本原理就是前端的收发器收到信号,通过基带系统进行解码,解码后通过摇控器的 LPC1549 芯片处理进而通过 Cypress 的 USB 芯片反馈到手机上。 无线通讯是通过 OFDM 方式进行图传以及数控的传输,其特点是控制通道数据通过遥控器通过 1Mhz 带宽的跳频发送,飞机回传的图象和控制通道回传数据通过 10Mhz 带宽进行定频传输。 为了保证数控通道及时性,采取定时跳频的方式。因为有可能信号会被干扰,在某一个特定频点时会被干扰,如果被干扰的话,飞机可能收不到遥控器的一些数据,此时我们需要切换不同的频点,找信噪比高的地方,保证它的可靠性。 它在 FCCID 通信管理局申请的 5G 频段的频宽执照在 5727-5821Mhz,但实际上,其操作已超过通讯管理局规定的频段。在我们研究过程中发现滥用这个频段的资源已达 5845Mhz。遥控器与飞机如何进行识别,需要配对及连接过程。 配对的唯一信息来自遥控器,所有信息都是遥控发给无人机,配对成功后可以在操作过程中识别到哪个是我控制的无人机,且这些控制配对信息皆通过摇控器芯片 LPC1549 的序列号生成。 基本上无线通讯架构的过程,首先是摇控器先初始化芯片,然后初始化基站系统各个寄存器,寄存器里存入了唯一可以配对码的信息。这个配对码有五个字节,写入到寄存器里面,真正用到只有三个字节,所以就有可能无线期劫持无人机。 无线通讯传输的过程其实是非对称传输,无人机遥控器发的信息跳频传输给飞机,接收端也是跳频接收,但是图传和下行通道是由飞机以定频的方式发送,且这些跳频算法都是通过代码来实现的。 下图即遥控器用于检测飞机是否配对的算法检测基带芯片 SPI 地址 0xE4、0xE5、0xE6进行比较。所以劫持一台无人机,我们可以通过暴力破解的方式,用所有的密钥空间进行离线的破解,找到配对码,去控制无人机,在控中时候就可以动态改掉配对码,让这个无人机属于你。 无人机反调对抗技术 我们也发现了一些硬件的反调技术和软件的反调技术,比如说用 atmel 芯片的安全位置1,可以阻止外置硬件仿真器的挂载调试,遥控器的 LPC1549 通过 ADC 的粒度检测来检测调试器,LightBridge 用的 stm32F103 芯片通过 remap SWD IO 来使用 swd 调试接口失效,通过遥控器的硬件开关电路来阻止 LPC1549 芯片硬件仿真调试。

|



【本文地址】