| 遥感影像几何精纠正(含详细步骤) | 您所在的位置:网站首页 › 遥感基本原理实验报告结果分析怎么写 › 遥感影像几何精纠正(含详细步骤) |
遥感影像几何精纠正(含详细步骤)
|
文章目录
前言一、原理及方法几何精纠正地面控制点(GCP)的选取方法正射影像纠正多项式模型图像重采样双线性内插法数据源及研究区概况
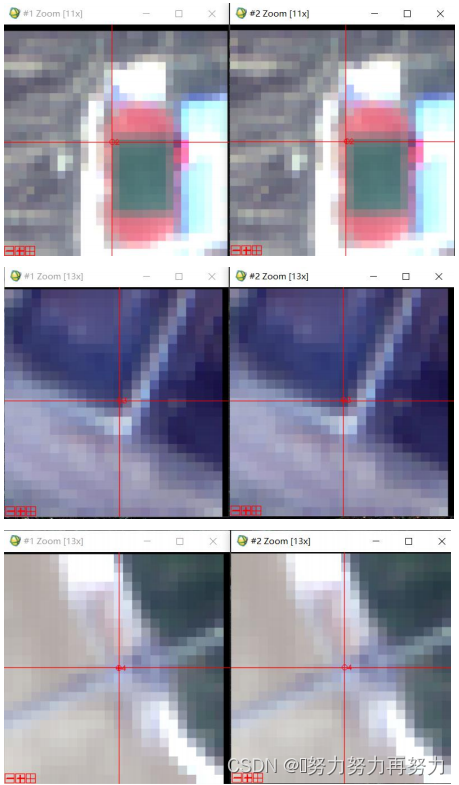
二、操作步骤三、结果分析常见问题与解决方法总结
前言
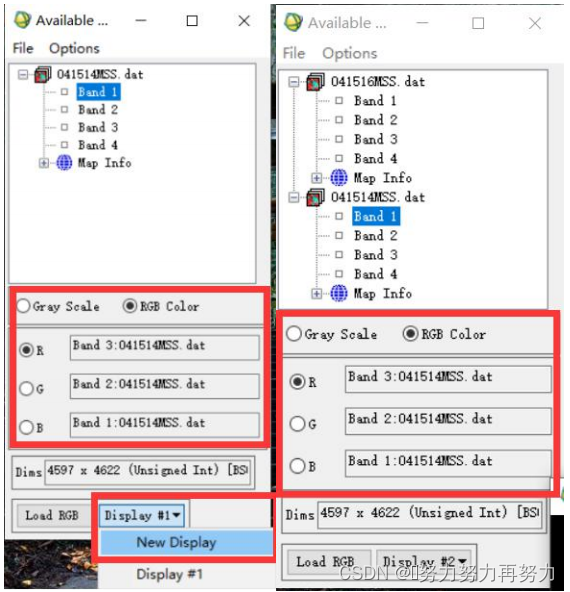
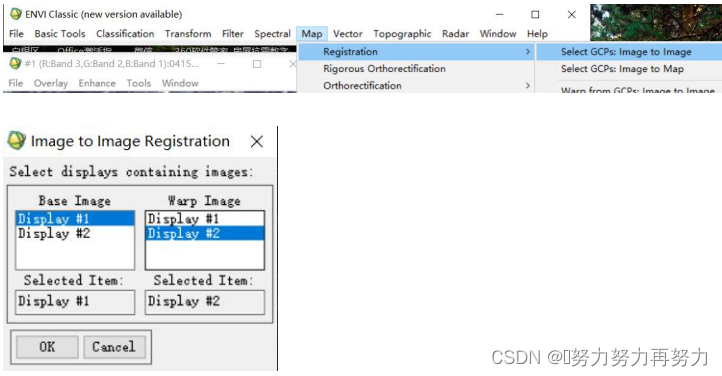
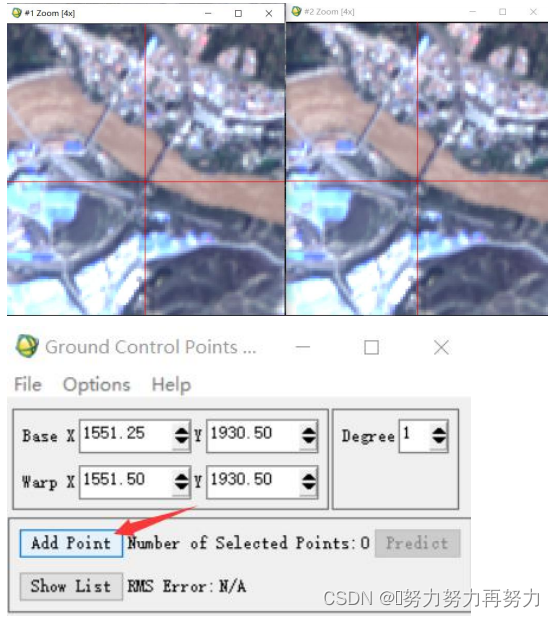
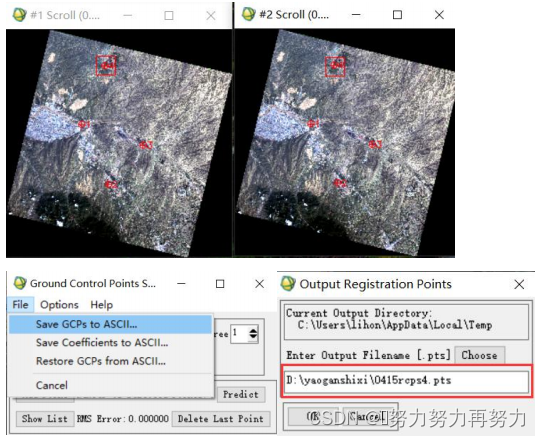
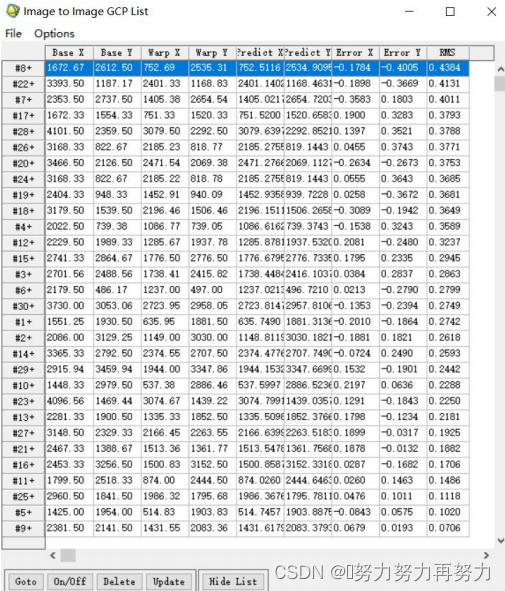
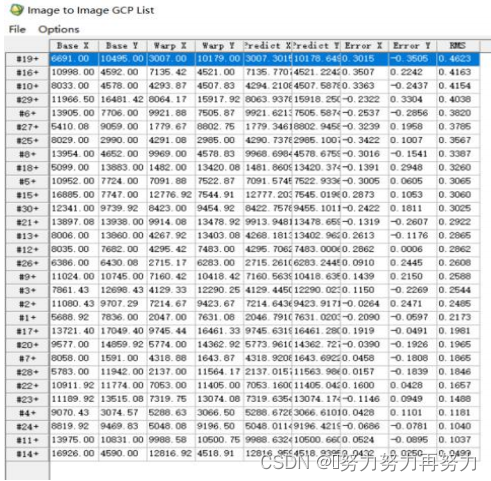
本文旨在: 深入理解影像几何精纠正的原理;学会使用国产高分一号影像几何精纠正的方法与步骤。 一、原理及方法 几何精纠正几何精纠正又称为几何配准(registration),是指把不同传感器获取的具有几何精度的图像、地图或数据集中的相同地物元素精确的彼此匹配、叠加在一起的过程。几何精纠正以基础数据集作为参照(BASE), 由于标准的地图涉及国家安全机密,使用需要申请,一般不用于教学,因此我们采用图像作为基础数据集,该过程称为相对纠正,即以一景图像作为基础,纠正其他的图像,这属于图像-图像的纠正。 进行影像几何精纠正的必要性:在很多情况下,具有多种传感器、多时段、多平台、甚至多学科的数 据,需要进行集成处理,如模式识别、变化监测等,各种图像数据集在空间上必须彼此匹配,因此,必须进行影像几何精纠正。 进行影像几何精纠正的重要性: 第一,只有在进行纠正后,才能对图像信息进行各种分析,制作满足量测和定位要求的各类遥感专题图;第二,在同一地域,应用不同传感器、不同光谱范围以及不同成像时间的各种图像数据进行计算机自动分类、地物特征的变化监测或其他应用处理时,必须进行图像间的空间配准,保证不同图像间的几何一致性;第三,利用遥感图像进行地形图测图更新要求遥感图像具有较高的地理坐标精度。 几何精纠正的基本原理: 回避成像的空间几何过程,直接利用地面控制点数据对遥感图像的几何畸变本身进行数学模拟,并且认为遥感图像的总体畸变可以看做是偏移、缩放、旋转、透视变形、挤压等基本变形综合作用的结果。因此,校正前后图像相应点的坐标关系可以用一个适当的数学模型来表示。几何精纠正的基本技术是同名坐标变换方法,即通过在基础数据和图像中分别寻找地面控制点(GCP)的同名坐标并借此建立变换关系来进行几何精纠正。 地面控制点(GCP)的选取方法根据图像特征和地区情况,结合野外调查和地形图选择控制点(GCP),本步骤直接影响着图像最后的纠正精度。 控制点的数目:实际工作中,GCP 的数量取决于,1、图像校正采用的数字模型;2、GCP 采集方式或来源;3、区域地形条件;4、图像类型和处理级别;5、成图精度要求;6、软件平台。对于常用的多项式方法而言,本实习采用二阶多项式,二阶多项式有 12 个系数,需要 12 个方程(6 个控制点),实际工作表明, 使用控制点的最少数目来校正图像,效果往往不好,一般而言,需要多选取 20-30 个控制点,本实习要求需要至少 30 个控制点。 控制点的分布:控制点在工作范围内应该均匀分布,并且图像的四角附近均要有一个 GCP,才能充分控制成图区域的精度。对于地形高差较大的区域,GCP 的垂直分布也非常重要,在最高和最低点或其附近需要有 GCP。在变化不明显的大面积区域(如沙漠),控制点可以少一点。在特征变化大而且对精度要求高的区域,应该多布点。但是,要尽可能避免控制点之间构成直线关系,避免控制点仅分布在狭长的范围里。 控制点的确定:GCP 应选择可以精确定位的像素点,与背景反差要大,最好是直角转弯处,定位相对容易。理想的GCP 可以是水泥人行道交叉处或水泥地的角,特别是与周围地物反差较大的点。GCP 要位于近地平面,不受阴影和透视对 GCP 位置测量的影响,山顶有地形畸变,尽量选择在平原、低地,大致同高程的控制点,不能选择山顶点作为控制点,在图像中必须是恒久地物,不应随时间、季节而发生变化。在使用 ENVI 进行几何精纠正的过程中,可以预测每个控制点可能产生的 RMS 误差,本实习要求单点定位误差不得超过 0.5 个像元大小(RMS error ≤0.5),山区可适当放宽至 1 个像元。如果存在个别控制点无论如何调 整仍然不能满足控制点精度要求,则予以删除。必要时可另外增加新的控制点,以确保所选控制点均匀分布在图幅的各个部分。 正射影像纠正正射影像纠正是指考虑因地形效应引起的影像畸变,根据数字高程模型(DEM)或者数字表面模型(DSM)消除正射影像因成像几何条件和地形高差而引起的偏移的过程。对于空间分辨率大于 10m 的图像,特别是亚米级图像,受遥感器成像的影响,地物在图像中并非是垂直视角的,例如,高大的建筑物是倾斜的,必须进行正射校正。低于该分辨率的图像,根据需要和数据情况选择进行正射校正。 多项式模型有理多项式几何精纠正模型是面向高分辨率卫星影像的通用成像传感器模型,通过引入更多的定向参数获得较高的模拟精度,需要有高程数据(DEM)参与解算,本次实习采用的是二次多项式模型。 图像重采样指对离散数据组成的数字图像按所需的像元位置或像元间距进行插值计算,以构成新图像的过程。常用的重采样方法有最近邻方法,双线性内插方法和三次卷积内插方法,本次实习采用的是双线性内插(Bilinear)的方法。 双线性内插法双线性内插法通过取采样点到周围 4 邻域像元的距离加权来计算其重采样值,该方法的优点是简单且具有一定的精度,一般能得到满意的插值效果;缺点是具有低通滤波的性质,会损失图像中的一些边缘或线性信息,导致图像模糊。 数据源及研究区概况兰州地区高分一号数据 2 景(含全色波段 PAN 与多光谱波段 MSS),成像时间分别 2016-07-27 和 2014-07-24。 1.将高分数据解压缩释放到适当的目录中,说明释放的文件目录中各个文件的含义。 4.启动 ENVI Classic,打开并显示 MSS 图像文件,先打开 14 年图像文件,然后新建 display 打开 16 年图像文件,利用 3、2、1 波段进行 RGB 合成;利用几何校正模块中的 Select GCPs:Image to Image 进行几何精纠正操作,具体步骤,MAP–>Registration–>Select GCPs:Image to Image,在弹出的界面中,基准影像选择 Display#1(14 年),待纠正影像选择Display#2(16 年) 5.从 2014 年基准影像和 2016 年待纠正影像中手工选取 4 个控制点,要求 4 个控制点在影像上均匀分布, 且为同名地物点,控制误差,先在像元级图像上找到同名地物点,再点击 Add Point,最终选择了如下所示的 4 个控制点;然后保存控制点文件,具体操作,File–>Save GCPs to ASCLL–>choose 输出路径。 从精纠正结果检验这一步骤可以看出在与参考影像做卷帘操作时,图像在居民区、道路等处均无明显的跳跃,主要原因是控制点个数较多且都能保证 单点定位误差 RMS≤0.5,能够实现整景影像的精纠正。 图一为 2016 年 MSS 影像精纠正结果误差统计图表; 图二为 2016 年 PAN 影像精纠正结果误差统计图表。 图中 Base X 代表 GCP 对应基准图像 X 像素坐标,Base Y 代表 GCP 对应基准图像 Y 像素坐标,Warp X 代表 GCP 对应校正图像 X 像素坐标,Warp Y 代表 GCP 对应校正图像 Y 像素坐标,Predict X 代表预测 GCP 对应校正图像 X 像素坐标,Predict Y 代表预测 GCP 对应校正图像 Y 像素坐标,Error X 代表 GCP 的 X 坐标 误差,Error Y 代表 GCP 的 Y 坐标误差,RMS 代表 GCP 的 X、Y 总误差 1.在调整控制点的位置使单点定位误差 RMS≤0.5 时,需要耗费很长的时间,且可能出现越调整误差越大的的现象。 解决方法:通过观察一些调整前后点的误差变化,得到了一种较为迅捷的方法。即若 Error Y > 0,表明待纠正影像(16 年影像)上的控制点在 Y 方向上偏往正方向,需要将其往 Y 的负方向移动,即往下移动,反之 Error Y < 0,将待纠正影像上的控制点往上移动;同理,Error X > 0,将待纠正影像上的控制点往 右移动,Error X < 0,将待纠正影像上的控制点往左移动。且移动时 Error 的绝对值为 1 大致移一个像元。 2.在操作步骤 7 中使用 update 功能时,会发现使用几次后有几个控制点汇集在了一起,导致误差更大。 解决方法:出现这种问题的原因是,当进行完排序后选择误差最大的控制点进行位置调整,然后点击 update,此时更新完误差最大的控制点不一定是刚刚的点,但是此时影像界面中点的位置还处于刚刚点的附近,如果此时不注意,直接在目前的位置上继续进行位置调整,就可能会导致控制点的汇集。所以在每次进行控制点位置调整和 update 之前,都要先在列表上选中想要修改的控制点。 总结以上就是本文要讲的内容。ENVI classic中左下角的全景图像视窗:该视窗涵盖了整景影像,可以通过该视窗看到影像整体的光谱特征、地物分布特征等,在选取控制点时第一步先在该视窗下框选范围,操作者需想好要在什么样如:山坡,城市,河流的区域附近进行选点。上面的主图像视窗:该视窗是对全景影像视窗中所框选的影像区域的放大,可以更清楚地看到此范围内的各种地物,如交叉路口,井,大型建筑等,操作者在此窗口下框选具体地物。 右下角的像元级图像视窗:该视窗是对主图像视窗中所框选的影像区域的放大,用于具体确定控制点 的位置和后续位置的调整,可通过该视窗左下角的“+ -”号进一步缩放以达到减小误差的目的。有问题大家可以在讨论区讨论,麻烦觉得文章对您有所帮助的朋友帮忙点个赞,谢谢。 |

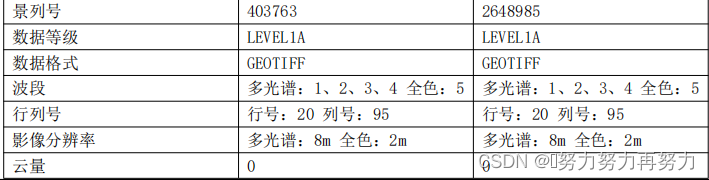
 两景影像都处于兰州市的行政区内,具体位于城关区和榆中县的交界地带,行号均为 20,列号均为 95,其中 14 年的一景影像经纬度范围为 35.8171°E-36.2120°E,103.788°N-104.258° N,16 年的一景影像经纬度范围为 35.8095°E-36.2153°E,103.879°N-104.369°N。(经纬度数据从多光谱波段的 xml 文件中得到,但全色波段文件中的数据与之有较小的偏差)
两景影像都处于兰州市的行政区内,具体位于城关区和榆中县的交界地带,行号均为 20,列号均为 95,其中 14 年的一景影像经纬度范围为 35.8171°E-36.2120°E,103.788°N-104.258° N,16 年的一景影像经纬度范围为 35.8095°E-36.2153°E,103.879°N-104.369°N。(经纬度数据从多光谱波段的 xml 文件中得到,但全色波段文件中的数据与之有较小的偏差)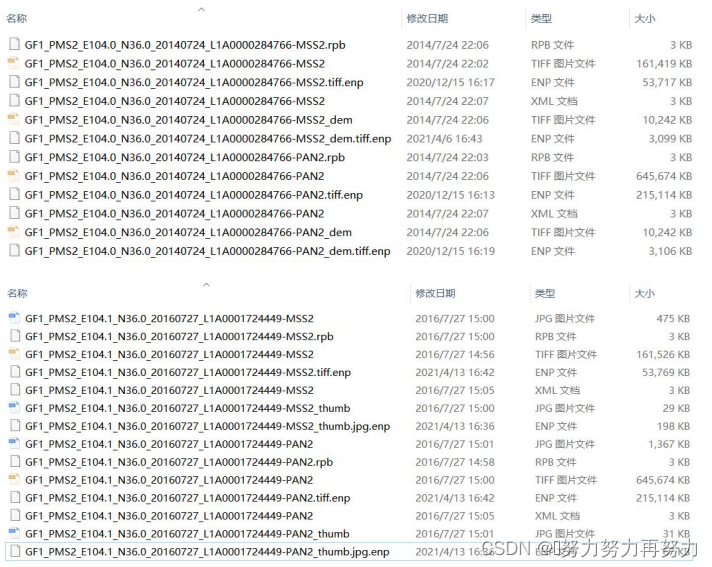 RPB 文件:有详细的 RPC 模型参数,用于图像正射校正。(ENVI 进行 RPC 正射校正时,会自动将 RPC 文件嵌入到处理结果中) TIFF 图片文件:数据图像文件。 ENP 文件:金字塔影像文件。 XML 文档:里面有详细的卫星参数信息,包括云量 CloudPercent,成像时间 ReceiveTime,传感器类型 SensorID,景列号 SceneID,数据等级 ProductLevel 等信息。(全色波段和多光谱波段分别有一个对应的 xml 文件) JPG 图片文件:影像数据微缩图及快视图。 2.启动 ENVI,打开待校正影像。(包括 14 年影像 MSS、PAN、DEM 的 TIFF 文件和 16 年影像 MSS、PAN 的 TIFF 文件)
RPB 文件:有详细的 RPC 模型参数,用于图像正射校正。(ENVI 进行 RPC 正射校正时,会自动将 RPC 文件嵌入到处理结果中) TIFF 图片文件:数据图像文件。 ENP 文件:金字塔影像文件。 XML 文档:里面有详细的卫星参数信息,包括云量 CloudPercent,成像时间 ReceiveTime,传感器类型 SensorID,景列号 SceneID,数据等级 ProductLevel 等信息。(全色波段和多光谱波段分别有一个对应的 xml 文件) JPG 图片文件:影像数据微缩图及快视图。 2.启动 ENVI,打开待校正影像。(包括 14 年影像 MSS、PAN、DEM 的 TIFF 文件和 16 年影像 MSS、PAN 的 TIFF 文件) 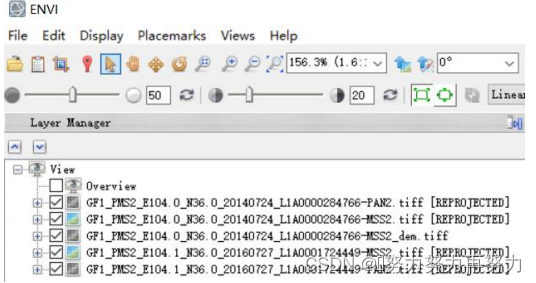 3.利用 ENVI 的 search 功能搜索 RPC Orthorectification Workflow 工具分别完成以上 4 景影像(2 景全 色波段,2 景多光谱波段)的正射影像纠正,其中要求 DEM 数据采用 2014 年高分数据目录中的相应数据, 结果数据特征:WGS84 坐标系,高斯—克吕格投影(Transverse Mercator),投影分带 48N,空间分辨率, 取默认值,输出路径最好不要选在 C 盘。
3.利用 ENVI 的 search 功能搜索 RPC Orthorectification Workflow 工具分别完成以上 4 景影像(2 景全 色波段,2 景多光谱波段)的正射影像纠正,其中要求 DEM 数据采用 2014 年高分数据目录中的相应数据, 结果数据特征:WGS84 坐标系,高斯—克吕格投影(Transverse Mercator),投影分带 48N,空间分辨率, 取默认值,输出路径最好不要选在 C 盘。 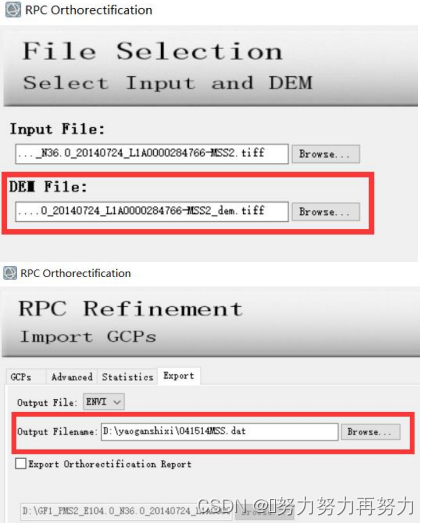

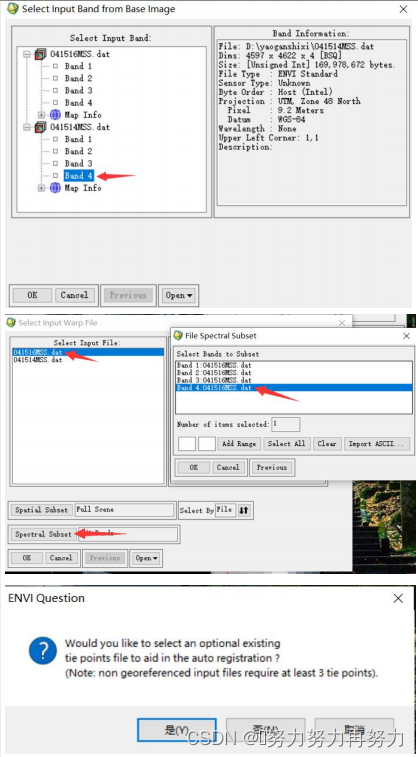
 6. 据 上 一 步 骤 使 用 自 动 选 点 工 具 另 外 选 取 30 个 控 制 点 打 开 控 制 点 误 差 表 。 具 体 操 作 , Map–>Registration–>Automatic Registration:Image to Image,基准影像选择 14 年第 4 波段,待纠正影像选择 16 年第 4 波段,随后在弹出的对话框中选择“是”,并添加上一步保存的 4 个控制点文件,控制点数目改为 30,其他参数保持默认,结果只出现了 17 个控制点,在新出现的界面中选择 Options–>Order Points by Error,按照误差大小降序排列控制点。
6. 据 上 一 步 骤 使 用 自 动 选 点 工 具 另 外 选 取 30 个 控 制 点 打 开 控 制 点 误 差 表 。 具 体 操 作 , Map–>Registration–>Automatic Registration:Image to Image,基准影像选择 14 年第 4 波段,待纠正影像选择 16 年第 4 波段,随后在弹出的对话框中选择“是”,并添加上一步保存的 4 个控制点文件,控制点数目改为 30,其他参数保持默认,结果只出现了 17 个控制点,在新出现的界面中选择 Options–>Order Points by Error,按照误差大小降序排列控制点。 
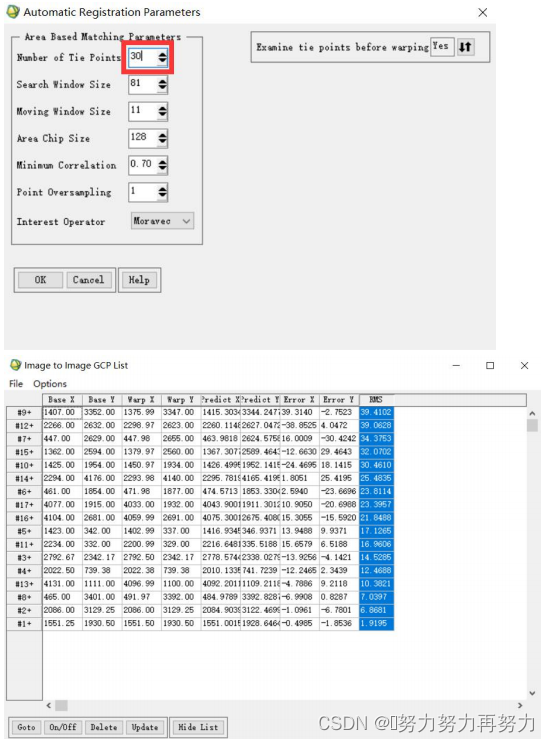 7. 结合影像显示窗口逐一观察误差较大的控制点,对误差较大的控制点进行精确的位置调整和匹配。然后再利用 Update 功能,调整控制点表列。要求单点定位误差不得超过 0.5 个像元大小(RMS error ≤0.5), 山区可适当放宽至 1 个像元。如果存在个别控制点无论如何调整仍然不能满足控制点精度要求,则予以删除。必要时可另外增加新的控制点,以确保所选控制点均匀分布在图幅的各个部分。 首先应该将 Degree 调成 2,并图上明显不对应的的点删除,如图中的 6、7、13;(因为这三点均不在 16 年的影像中)
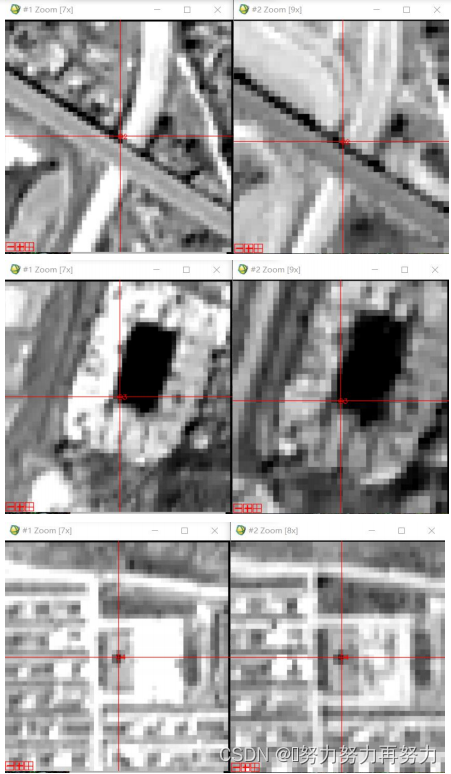
7. 结合影像显示窗口逐一观察误差较大的控制点,对误差较大的控制点进行精确的位置调整和匹配。然后再利用 Update 功能,调整控制点表列。要求单点定位误差不得超过 0.5 个像元大小(RMS error ≤0.5), 山区可适当放宽至 1 个像元。如果存在个别控制点无论如何调整仍然不能满足控制点精度要求,则予以删除。必要时可另外增加新的控制点,以确保所选控制点均匀分布在图幅的各个部分。 首先应该将 Degree 调成 2,并图上明显不对应的的点删除,如图中的 6、7、13;(因为这三点均不在 16 年的影像中) 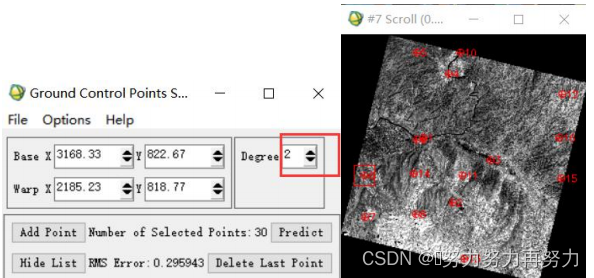 其次应该调整上一步中产生的控制点 1、2、3、4; 添加新的控制点,不断调整控制点的位置,保证单点定位误差 RMS error ≤0.5。
其次应该调整上一步中产生的控制点 1、2、3、4; 添加新的控制点,不断调整控制点的位置,保证单点定位误差 RMS error ≤0.5。 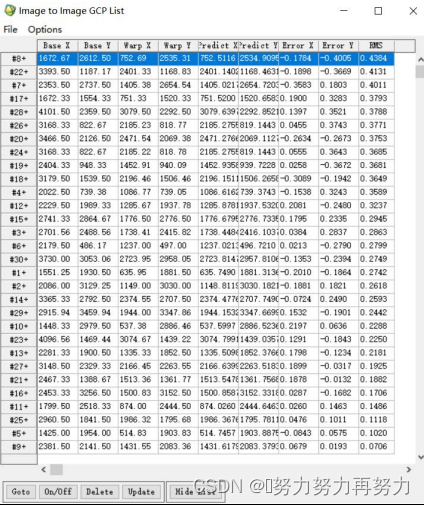 8. 选择 options 菜单中的 Warp File(as Image to Map),采用二阶多项式和双线性内插法进行影像对影像纠正,重采样生成纠正多光谱影像。
8. 选择 options 菜单中的 Warp File(as Image to Map),采用二阶多项式和双线性内插法进行影像对影像纠正,重采样生成纠正多光谱影像。 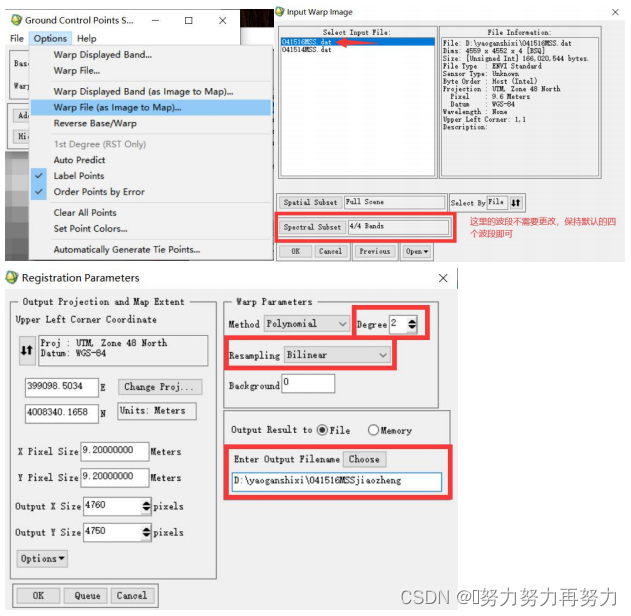 9.目视检测纠正精度。启动 ENVI,打开待纠正和纠正好的 16 年多光谱影像,然后选择 Display–>View Swipe 打开卷帘窗口,查看待纠正影像与纠正好的影像,结合效果,检验精纠正效果。
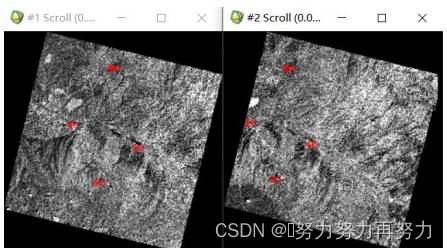
9.目视检测纠正精度。启动 ENVI,打开待纠正和纠正好的 16 年多光谱影像,然后选择 Display–>View Swipe 打开卷帘窗口,查看待纠正影像与纠正好的影像,结合效果,检验精纠正效果。 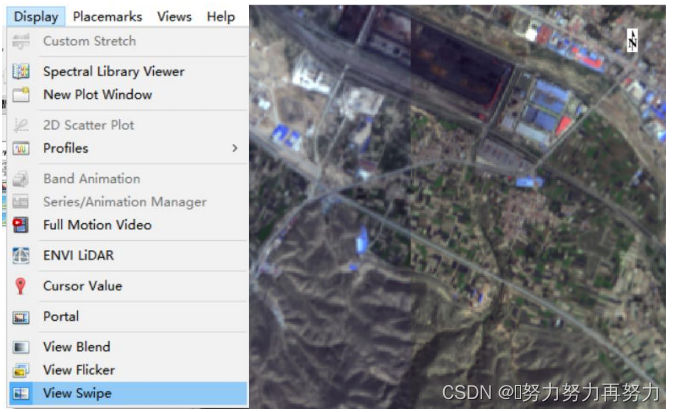 10.重复第 4-9 步操作,进行 16 年全色波段影像的影像对影像纠正,其中较为关键的步骤截图如下: 选择 4 个控制点:
10.重复第 4-9 步操作,进行 16 年全色波段影像的影像对影像纠正,其中较为关键的步骤截图如下: 选择 4 个控制点: 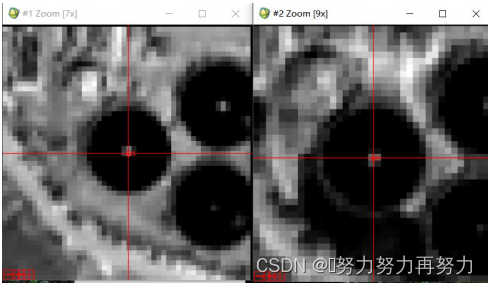
 自动选点工具选取 30 个(实际为 21 个)点:
自动选点工具选取 30 个(实际为 21 个)点: 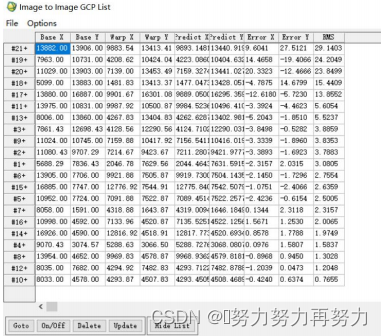 添加新的控制点,调整位置保证单点误差 RMS error ≤0.5:
添加新的控制点,调整位置保证单点误差 RMS error ≤0.5: 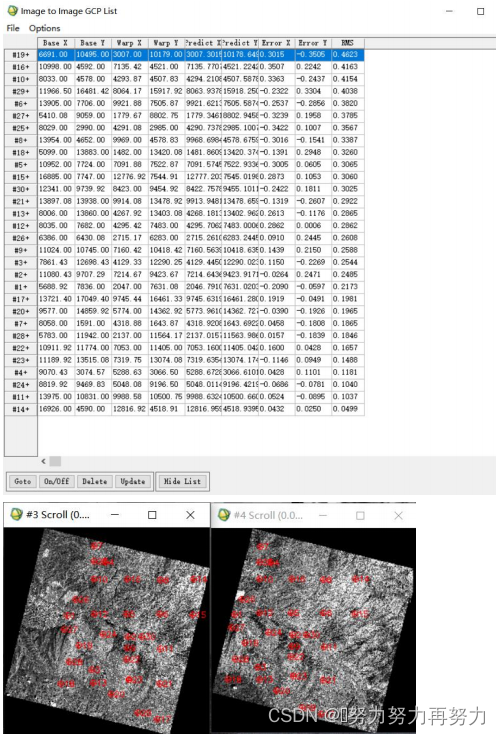 精纠正结果检验:
精纠正结果检验: 
 将 2016 年多光谱(MSS)影像几何精纠正二阶多项式系数保存到 ASCLL 文件,使用 Excel 打开如图:
将 2016 年多光谱(MSS)影像几何精纠正二阶多项式系数保存到 ASCLL 文件,使用 Excel 打开如图: 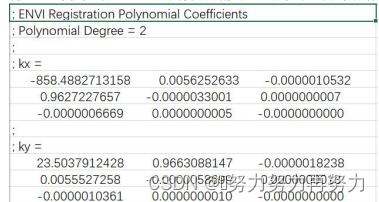 则对应的系数应该为(保留 4 位小数):
则对应的系数应该为(保留 4 位小数):  将 2016 年全色(PAN)影像几何精纠正二阶多项式系数保存到 ASCLL 文件,使用 Excel 打开如图:
将 2016 年全色(PAN)影像几何精纠正二阶多项式系数保存到 ASCLL 文件,使用 Excel 打开如图: 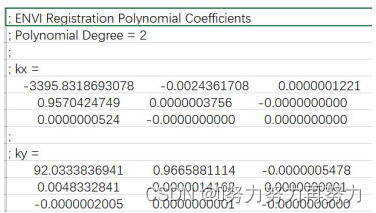 则对应的系数应该为(保留 4 位小数):
则对应的系数应该为(保留 4 位小数): 
【本文地址】