| 【智能优化算法】狼群算法 (Wolf Pack Algorithm, WPA),2013 | 您所在的位置:网站首页 › 遗传算法谁提出的 › 【智能优化算法】狼群算法 (Wolf Pack Algorithm, WPA),2013 |
【智能优化算法】狼群算法 (Wolf Pack Algorithm, WPA),2013
|
前言
狼群算法((Wolf pack algorithm ,WPA)采用了基于人工狼主体的自下而上的设计方法和基于职责分工的协作式搜索路径结构。 吴虎胜等在 2013 年提出模拟狼群捕食行为及其猎物分配方式
截止到 2023 年,算法引用趋势 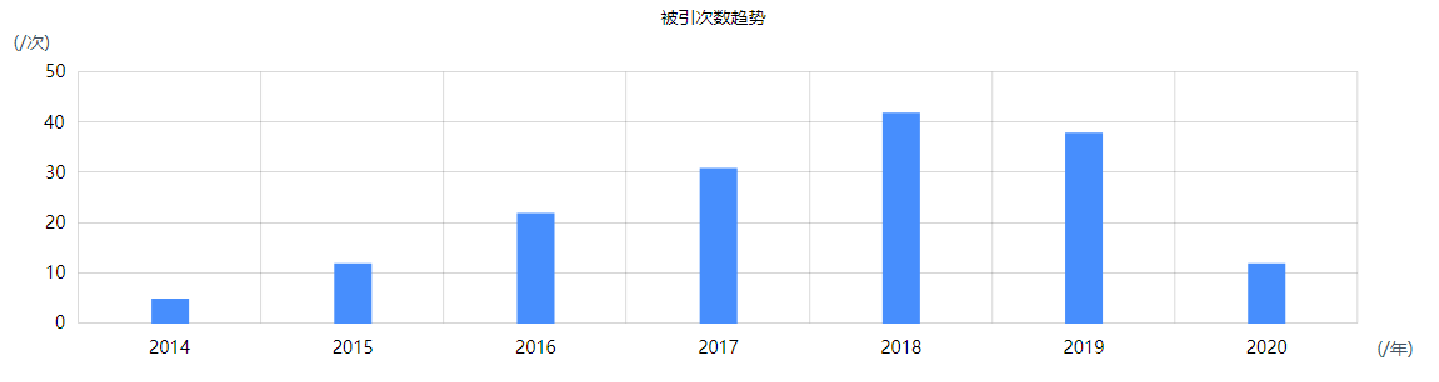 1. 狼相关的生物群行为
1. 狼相关的生物群行为
狼是分布最广的群居群猎动物。有明确的社会分工,它们团结协作为狼群的生存与发展承担着各自的责任。智能颇高,彼此之间通过气味、叫声沟通。 狼的社会分工有头狼、探狼和猛狼: 头狼: 将当前离猎物气味浓度最高(适应度最优)的狼作为头狼,起指挥狼群行动的作用,头领狼召唤其他狼向猎物靠近,具有指挥狼群行动的能力,在搜寻过程中头狼的角色是动态变化的。探狼: 初始时,狼群会派出一部分狼作为探狼,在环境四周搜寻猎物。探狼在搜寻过程中如果发现猎物气味浓度更高,就作为头狼,呼唤其他的狼进行围捕行为。后期,比较不同的探狼猎物的适应度,选择适应度较高的作为头狼。猛狼: 猛狼感应到头狼呼唤,就立刻向头狼位置奔袭,在奔袭的过程中,若是发现猎物的适应度更高,则立刻替代原来的头领狼,指挥其他狼行动。
猎物分配规则: 捕获猎物后,狼群并不是平均分配猎物,而是按“论功行赏、由强到弱”的方式分配,即先将猎物分配给最先发现、捕到猎物的强壮的狼,而后再分配给弱小的狼。(即论功行赏,先强后弱) 将狼群的整个捕猎行动抽象为三种智能行为:游走行为、召唤行为和围攻行为 2. 算法仿生设计 2.1 头狼产生规则初始化: 初始解空间中,具有最优目标函数值的人工狼即为头狼。 迭代: 在迭代过程中,将每次迭代后最优狼的目标函数值与前一代中头狼的值进行比较,若更优则对头狼位置进行更新,若此时存在多匹的情况,则随机选一匹成为头狼。头狼不执行3种智能行为而直接进入下次迭代,直到它被其他更强的人工狼所替代。 目标函数值:定义为人工狼所能感知到的猎物气味浓度 Y = f ( X ) Y=f(X) Y=f(X) 2.2 游走行为:探狼搜索猎物初始化: 将解空间中除头狼外最佳的 S_num 匹人工狼视为探狼,在解空间中搜索猎物, S_num 随机取 [ n / ( α + 1 ) , n / α ] [n/(α+1),n/α] [n/(α+1),n/α] 之间的整数, α α α 为探狼比例因子。 游走: 选择气味最浓并且大于当前位置气味浓度 Y i 0 Y_{i0} Yi0 的方向前进一步: x i d p = x i d + s i n ( 2 π × p / h ) × s t e p a d x_{id}^p=x_{id}+sin(2π×p/ℎ)× step_a^d xidp=xid+sin(2π×p/h)×stepad 其中, s t e p a d step_a^d stepad 为游走步长, h ℎ h 为游走方向, p = 1 , 2 , … , h p=1,2,…,ℎ p=1,2,…,h。 重复以上游走行为,直至存在某一匹探狼的气味浓度 Y i > Y l e a d Y_i> Y_{lead} Yi>Ylead,则探狼 i i i 代替头狼并发起召唤行为,或者达到最大游走次数 T m a x T_{max} Tmax。 2.3 召唤行为:头狼通过嚎叫发起召唤行为,头狼周围的猛狼以较大的奔袭步长逼近头狼所在位置。 x i d k + 1 = x i d k + s t e p b d ⋅ ( g d k − x i d k ) ∣ g d k − x i d k ∣ x_{id}^{k+1}=x_{id}^k+step_b^d⋅\frac{(g_d^k−x_{id}^k)}{|g_d^k−x_{id}^k|} xidk+1=xidk+stepbd⋅∣gdk−xidk∣(gdk−xidk) 其中, g d k g_d^k gdk 为第 k k k 代群体头狼在第 d d d 维空间的位置, s t e p b d step_b^d stepbd 为奔袭步长。 奔袭途中,若猛狼 i i i 的气味浓度 Y i > Y l e a d Y_i> Y_{lead} Yi>Ylead,则猛狼 i i i 代替头狼并发起召唤行为;若 Y i < Y l e a d Y_i< Y_{lead} Yi |
【本文地址】