| matlab六杆机构运动分析 | 您所在的位置:网站首页 › 连杆机构动态图解 › matlab六杆机构运动分析 |
matlab六杆机构运动分析
|
以图示六杆机构为例,已知构件1的运动,确定机构中其它构件的运动(包括位移、速度、加速度) 参考书籍:《机械原理matlab辅助设计》 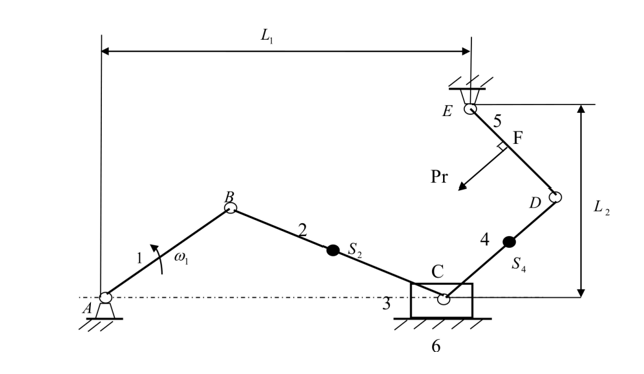 一.建立数学模型
一.建立数学模型
对六杆机构进行运动分析时,可以将其拆分成两个四杆机构,采用封闭矢量多边形法求解。首先建立机构封闭位置矢量方程式,之后对位置方程求一次导和二次导得到其速度和加速度方程,求解即可。 二.程序设计框图每个平面连杆机构运动分析MATLAB程序都由主程序和子函数两部分组成,其程序设计流程如下图。  三.确立数学解析式
三.确立数学解析式
为了对机构进行运动分析,以A为原点建立直角坐标系,并将各构件表示为杆矢。假设x轴正方向为水平向右, 如图所示,由封闭图形ABCA可写出机构各杆矢所构成的封闭矢量方程
将矢量方程分别投影到x轴和y轴可得
同理写出封闭图形CDEC各杆矢所构成的封闭矢量方程,联立可得六杆机构位置方程。 2.速度分析将位置矢量方程对时间t求一次导数, 得速度关系
若用矩阵形式来表示,则上式可写为
求解可得角速度w2和滑块速度v3。 3. 加速度分析将式(1-2)对时间t求二次导数,可得加速度关系表达式
同理,加速度矩阵方程如下
求解可得角加速度a2和滑块加速度a3。 由封闭图形CDEC可写出机构各杆矢所构成的封闭矢量方程,位置分析、速度分析与加速度分析同理;联立两个四杆机构分析方程即可解出机构中每一构件的运动。 四.matlab程序分析六杆机构的图形如上图片,假设杆1的长度为101.6mm,杆2的长度为254mm,杆3的长度为177.8mm,杆4的长度为304.8mm,原动件1以匀角速度w1 = 250 rad/s 逆时针转动,进行分析: % 调用fsolve函数求解位移方程 function f=pos_6(theta,theta1,length1,length2,length4,length5,L1,L2) f(1)=length1*cos(theta1)+length2*cos(theta(1))-theta(4); f(2)=length1*sin(theta1)+length2*sin(theta(1)); f(3)=length4*cos(theta(2))+length5*cos(theta(3))-L1+theta(4); f(4)=length5*sin(theta(3))+length4*sin(theta(2))-L2; end % theta1、theta2、theta4、theta5分别代表杆1,2,4,5与X轴正方向的距离 % omega2、omega4、omega5代表杆2,4,5的角速度 % length3表示滑块3和A点的距离 % velocity表示滑块3的线速度 % alpha_line表示滑块3的加速度 % theta2=theta(1); % theta4=theta(2); % theta5=theta(3); % length3=theta(4);这里我采用的是matlab用来求解非线性方程组的fsolve函数,求解原理就是利用最小二乘法解方程组。其中fsolve返回值为函数的解,pos_6是用于定义需求解的非线性方程组的函数文件名,X0是求根过程的初值,options为最优化工具箱的选项设定。Display选项决定函数调用时中间结果的显示方式,其中off为不显示,optimset(‘Display’,‘off’)将设定Display选项为off其中初值X0的取值。 function [theta,omega,alpha] = analysis_data_6(theta1,omega1,alpha1,length1,length2,length4,length5,L1,L2) options=optimset('display','off'); x0=[-1,0,1,100]; theta=fsolve(@pos_6,x0,options,theta1,length1,length2,length4,length5,L1,L2); % theta=theta.'; % 矩阵转置 theta2=theta(1); theta4=theta(2); theta5=theta(3); length3=theta(4); % 计算角速度 omega A=[-length2*cos(theta2),0,0,0; 0,(length4)*sin(theta4),(length5)*sin(theta5),-1; 0,length4*cos(theta4),length5*cos(theta5),0; -(length2)*sin(theta2),0,0,-1]; B=[length1*cos(theta1);0;0;(length1)*sin(theta1)]; omega = A\(B*omega1); omega2 = omega(1); omega4 = omega(2); omega5 = omega(3); velocity = omega(4); % 滑块3的线速度 % 计算角加速度alpha A1 = [length2*cos(theta2),0,0,0; 0,length4*sin(theta4),length5*sin(theta5),-1; 0,length4*cos(theta4),length5*cos(theta5),0; -length2*sin(theta2),0,0,-1]; At = [-omega2*length2*sin(theta2),0,0,0; 0,omega4*length4*cos(theta4),omega5*length5*cos(theta5),0; 0,-omega4*length4*sin(theta4),-omega5*length5*sin(theta5),0; -omega2*length2*cos(theta2),0,0,0]; Bt = [omega1*length1*sin(theta1);0;0;omega1*length1*cos(theta1)]; alpha = A1\(-At*omega+omega1*Bt); end主程序如下 length1=0.025; length2=0.071; length4=0.038; length5=0.030; L1=0.1; L2=0.04; omega1 = 10; alpha1 = 0; hd = pi/180; du = 180/pi; %调用函数计算六杆机构的位移、速度、加速度 for n1 = 1:361 theta1 = (n1-1)*hd; % 将角度转换为弧度制 [theta,omega,alpha] = analysis_data_6(theta1,omega1,alpha1,length1,length2,length4,length5,L1,L2); theta2(n1) = theta(1); % 杆2的角位移 theta4(n1) = theta(2); % 杆4的角位移 theta5(n1) = theta(3); % 杆5的角位移 length3(n1) = theta(4); omega2(n1) = omega(1); % 杆2的角速度 omega4(n1) = omega(2); % 杆4的角速度 omega5(n1) = omega(3); % 杆5的角位移 velocity(n1) = omega(4); alpha2(n1) = alpha(1); % 杆2的角加速度 alpha4(n1) = alpha(2); % 杆4的角加速度 alpha5(n1) = alpha(3); % 杆5的角加速度 alpha_line(n1) = alpha(4); end n1 = 1:361; % 绘制图像 subplot(2,2,1); plot(n1,theta2,n1,theta4,n1,theta5,'k'); % 杆2、杆4、杆5随角度变化 xlabel('曲柄转角 \theta1/\circ'); ylabel('角位移/\circ'); legend('theta2','theta4','theta5'); grid on; hold on; % 以构件5的分析为例 subplot(2,2,2); % plot(n1,(theta5-theta5(1))*length5,'k'); % 杆5角位移随角度变化 plot(n1,theta5*du,'k'); % 杆5角位移随角度变化 xlabel('曲柄转角 \theta1/\circ'); ylabel('角位移/\circ'); legend('theta5'); grid on; hold on; subplot(2,2,3); % 杆5角速度变化 plot(n1,omega5,'k'); xlabel('曲柄转角 \theta1/\circ'); ylabel('角速度/ rad\cdots^{-1}'); legend('w5'); grid on; hold on; subplot(2,2,4); %杆5角加速度变化 plot(n1,alpha5,'k'); xlabel('曲柄转角 \theta1/\circ'); ylabel('角加速度/ m\cdots^{-1}'); legend('a5'); grid on; hold on;运行结果如下图 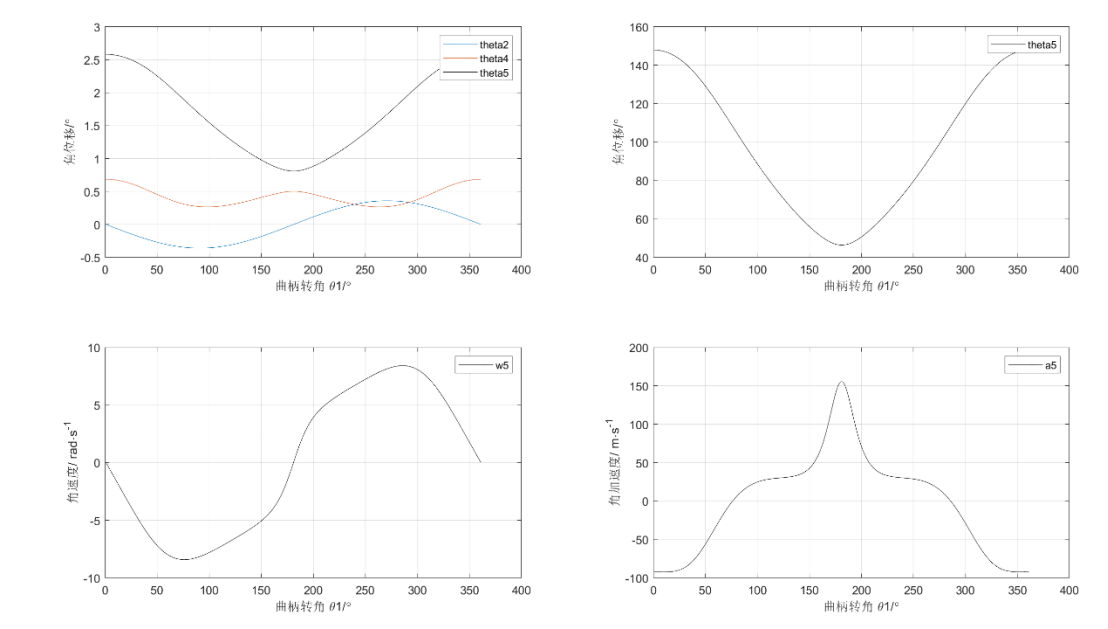
最后做了一个机构运动仿真模拟六杆机构的运动 j=0; for n1= 1:5:360 clf; j=j+1; x(1)=0; y(1)=0; x(2)=length1* cos((n1 - 1)*hd); y(2)=length1* sin((n1 - 1)*hd); x(3)=length3(n1); y(3)=0; x(4)=length3(n1)+length4*cos(theta4(n1)); y(4)=length4*sin(theta4(n1)); x(5)=L1; y(5)=L2; x(6)=0; y(6)=0; plot(x,y); grid on;hold on; plot(x(1),y(1),'o'); plot(x(2),y(2),'o'); plot(x(3),y(3),'o'); plot(x(4),y(4),'o'); plot(x(5),y(5),'o'); plot(x(6),y(6),'o'); axis([-0.05 0.14,-0.05 0.14]); xlabel('mm'); ylabel('mm'); m(j) = getframe; %getframe函数的作用是捕获坐标区或图窗作为影片帧。 % f(:,j)=getframe; end movie(m);仿真结果就不上传了,主要是没整明白怎么上传动图😅 在CSDN的第一篇文章,若建模或编程中存在疏漏,欢迎大家批评指正。 |
 分别代表杆1,2,4,5与X轴正方向的距离(变量命名详见函数注释)。
分别代表杆1,2,4,5与X轴正方向的距离(变量命名详见函数注释)。








【本文地址】