| 为什么汽车会选择前轮转向 | 您所在的位置:网站首页 › 转弯半径大好还是小好 › 为什么汽车会选择前轮转向 |
为什么汽车会选择前轮转向
|
生活中,我们见到的汽车普遍都是前轮转向,有没有想过为什么?今天我们站在汽车操作稳定性的角度去简单理解一下。 汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的情况下,汽车能遵循驾驶者通过转向系统及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。 先说结论,前轮转向操稳性更好。 理论分析进行汽车操作稳定性分析时,一般忽略若干因素影响,把汽车简化为二自由度的汽车模型,即沿Y轴方向的侧向运动和绕Z轴的横摆运动。可参考下图的车辆坐标系。 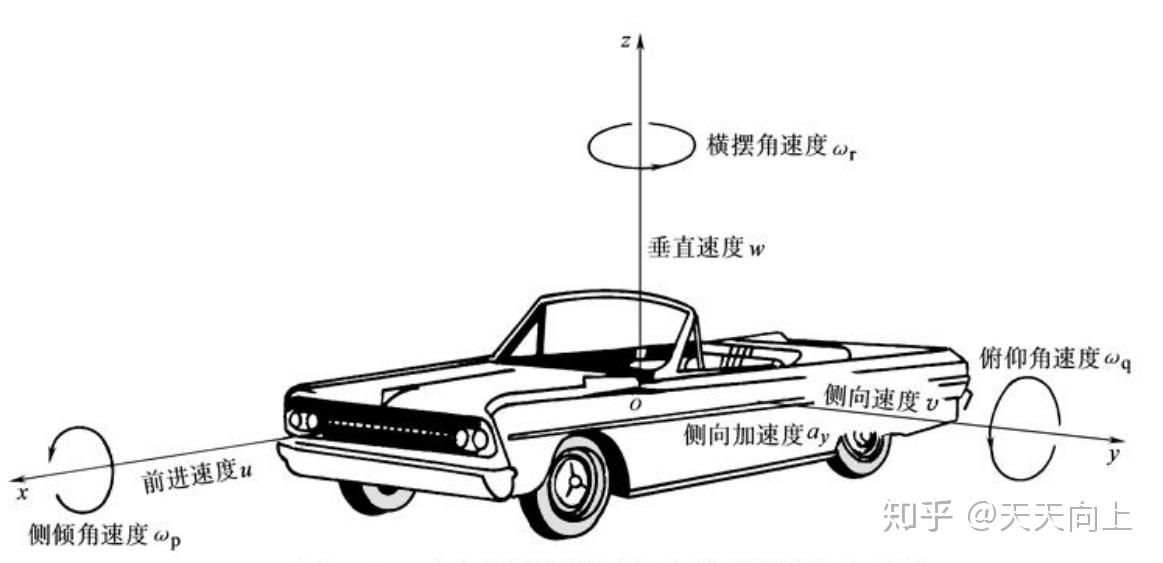 将车辆坐标系远点与汽车质心重合,二自由度车辆模型可简化为两轮车模型,如下图。 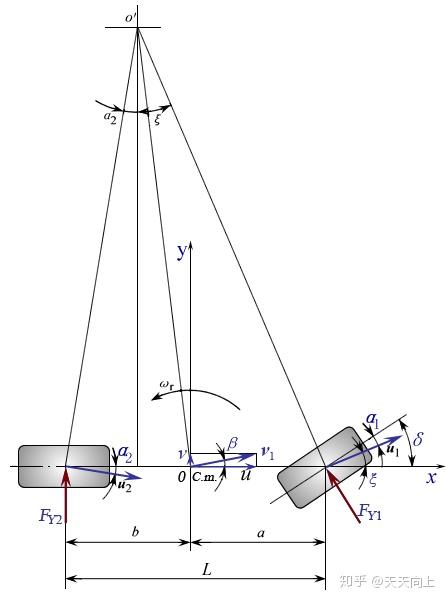 此处忽略繁琐推导(具体内容可参考汽车理论专业书籍),直接给出二自由度车辆运动微分方程式:  一般用稳态横摆角速度增益(横摆角速度与前轮转角)来评价稳态特性。 稳态时,车速和横摆角速度恒定:  带入车辆运动微分方程可以算出稳态横摆角速度增益:  其中,u可近似理解为车速,L为轴距,K为稳定性因数,与车辆参数有关。  如下图,当车速非常小时,侧向加速度接近于0。  此时的转弯半径有:  所以可由横摆角速度增益公式和R=u/wr计算车辆转弯半径为:  1)当K=0时,R=R0,车辆转弯半径不随车速变化,车辆稳定,此种稳态称为中性转向; 2)当K>0时,R>R0,车辆转弯半径随车速增大而增大,车辆稳定,此种特性称为不足转向; 3)当K 定性理解通过上面的理论分析,我们知道了车辆操稳性与稳定性因数直接相关,不过这个稳定性因素与车辆质量、轴距、前后轮侧偏刚度、质心位置等都有关系,但是这些参数之间存在耦合关系,不便于定性分析。所以我们对上述公式继续优化。 结合侧偏力计算公式:  对稳定性因数计算公式进一步处理:  式中,α1、α2分别代表前后轮侧偏角。很容易看出,当α1>α2时,车辆趋于不足转向,稳定性较好。 如下图,对于一般的乘用车,一般前重后轻,即质心靠前(a 当车辆转弯时,在离心力的作用下,前后轮都会产生侧偏力来克服离心力。有: Fy1*a*cosδ=Fy2*b 所以 Fy1=Fy2*b/( a*cosδ) 由于aFy2。一般情况下,前轮与后轮侧偏刚度差别不大(k1≈K2),所以α1>α2,车辆具有不足转向特性。  假如后轮为转向轮,则有:  Fy1*a=Fy2*b*cosδ 所以 Fy1=Fy2*b*cosδ/a 虽然a |
【本文地址】