| MPC轨迹跟踪算法 | 您所在的位置:网站首页 › 轨迹跟踪是什么 › MPC轨迹跟踪算法 |
MPC轨迹跟踪算法
|
MPC轨迹跟踪算法学习记录1
双移线绘制问题双移线参考轨迹绘制横坐标为X_phi的双移线结果对比
双移线绘制问题
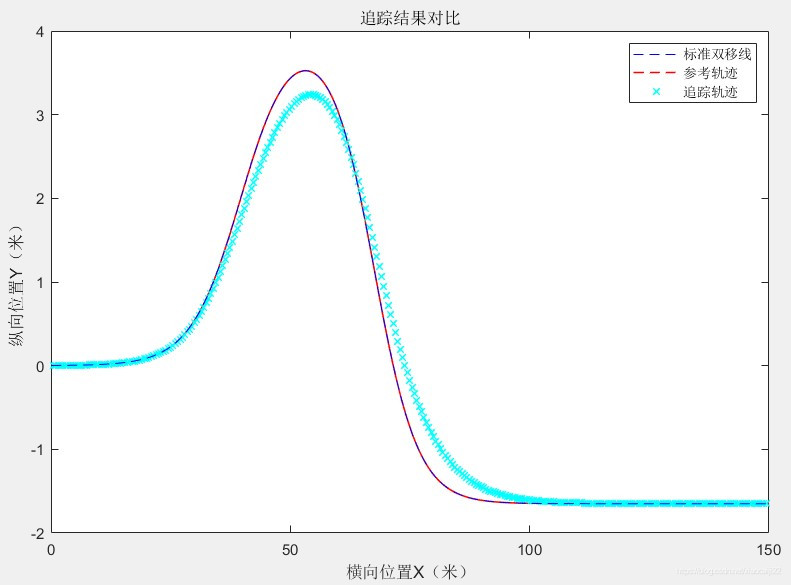
双移线作为一种经典工况,在测试车辆稳定性和无人驾驶轨迹跟踪仿真分析中应用广泛。本人在学习龚老师《无人驾驶车辆模型预测控制》第五章时,首先发现配套代码中没有绘制出参考轨迹,这样就不明确追踪效果如何。因此,参考网上案例,调制出了双移线参考轨迹。 双移线参考轨迹这里,本人是将X_predict作为参考双移线的横坐标,纵坐标是Y_ref。 figure(1); plot(X_predict, Y_ref,'r--','LineWidth',1); plot(X, Y,'cx','LineWidth',1); title('追踪结果对比'); xlabel('横向位置X(米)'); axis([0 150 -2 4]); %坐标轴 ylabel('纵向位置Y(米)'); legend('追踪轨迹','参考轨迹'); hold on;网上也有博主写到参考双移线的横坐标是X_phi,见下图: 首先,本人是在MATLAB中将单独绘制出以X_phi为横坐标,Y_ref为纵坐标的双移线,代码如下: clc; clear all; N=300; T=0.05; shape=2.4;%参数名称,用于参考轨迹生成 dx1=25;dx2=21.95;%没有任何实际意义,只是参数名称 dy1=4.05;dy2=5.7;%没有任何实际意义,只是参数名称 Xs1=27.19;Xs2=56.46;%参数名称 phi_ref=zeros(N,1);%用于保存预测时域内的期望轨迹 Y_ref=zeros(N,1);%用于保存预测时域内的期望轨迹 X_phi=0.05:0.5:150; X_ref=X_phi'; for p=1:1:N %%双移线追踪 z1=shape/dx1*(X_ref(p,1)-Xs1)-shape/2; z2=shape/dx2*(X_ref(p,1)-Xs2)-shape/2; Y_ref(p,1)=dy1/2*(1+tanh(z1))-dy2/2*(1+tanh(z2)); phi_ref(p,1)=atan(dy1*(1/cosh(z1))^2*(1.2/dx1)-dy2*(1/cosh(z2))^2*(1.2/dx2)); Yita_ref_cell{p,1}=[phi_ref(p,1);Y_ref(p,1)]; end figure(1); plot(X_ref, Y_ref,'b--','LineWidth',1); title('双移线图例'); xlabel('横向位置X(米)'); axis([0 150 -2 4]); %直线工况 % axis([-50 50 0 100]); 圆形工况 ylabel('纵向位置Y(米)'); legend('参考轨迹'); hold on;绘制出的参考轨迹如图所示: 这里单独生成的双移线会和之前绘制的以X_predict为横坐标的双移线有差别吗?感兴趣的同学可以把上述代码添加到书上第五章的代码中,这里本人绘制后发现两个参考轨迹并无差别,所以原代码中,直接可以用X_predict绘制横坐标,这样能直接保证它和纵坐标的向量长度保持一致。 |
 按照网上博主的介绍,如果将X_phi替换X_predict, 总是会出现报错,原因是参考网上的设置很难保证X_phi与Y_ref的向量长度保持一致,原代码中的(X_predict, Y_ref)是在迭代中同时计算出来的,这里本人还没有找出它到底输出的数据长度是多少,如果有同学清楚,烦请指点。
按照网上博主的介绍,如果将X_phi替换X_predict, 总是会出现报错,原因是参考网上的设置很难保证X_phi与Y_ref的向量长度保持一致,原代码中的(X_predict, Y_ref)是在迭代中同时计算出来的,这里本人还没有找出它到底输出的数据长度是多少,如果有同学清楚,烦请指点。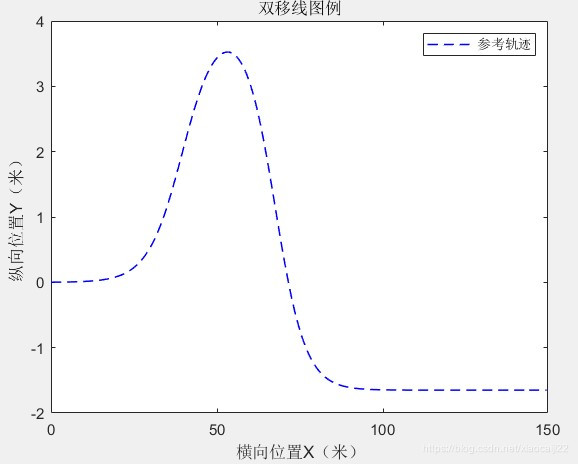
【本文地址】
公司简介
联系我们
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |