| 手把手教你修改FANUC 系统参数 | 您所在的位置:网站首页 › 车床6163走刀怎样调 › 手把手教你修改FANUC 系统参数 |
手把手教你修改FANUC 系统参数
|
点击免费领取☞数控车(铣),ug编程,cad绘图,数控仿真,数控机械类书籍等上10G教程 在上图的参数写入界面,直接按面板的翻页键,大概翻2页左右,就会出现这个界面,如何修改设备的时间,和日期等等东西,其实就是在这个界面上修改(光标移动到具体数字上修改就行),大家可以试试(上面的内容都是中文,相信大家都能看懂) 如果通过程序修改时间,时间变量对应的系统参数是:#3012系统变量。
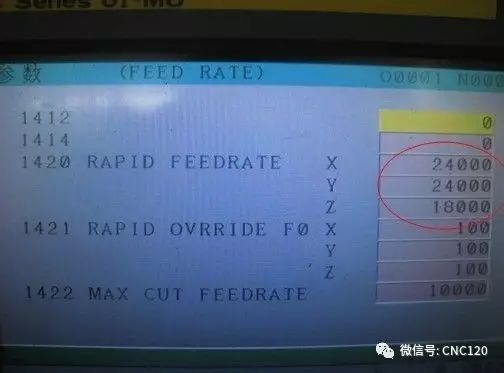
参数界面的 1420#参数,这个参数应该是比较实用的,就是设备各轴的快速移动速度,即GOO在100%倍率下得移动速度。例如现在图片内XYZ各轴的移动速度就是X轴24米,Y轴24米,Z轴18米,一般线轨的设备打这么快没问题,如果是矩形导轨还是不要开那么快。 这几个参数我曾经改过,因为当时一台加工中心设备的X轴移动时有异响,然后检查发现X轴丝杆轴承需要更换,而日本的NSK轴承仓库没有库存,X轴移动时空跑得负载都在50%多,所以就把参数减半,降低了X轴移动速度,降低X轴轴承的磨损速度,后来轴承买到后又改回来了。
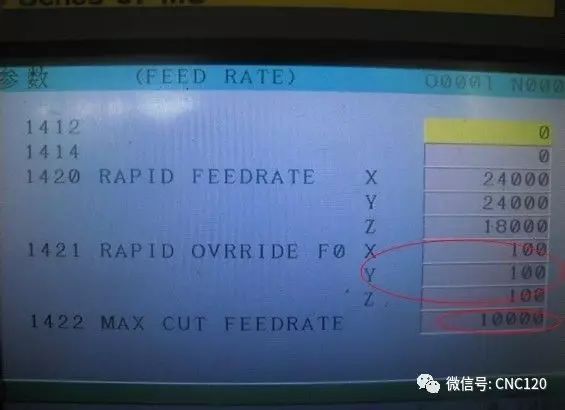
1421#就是设备各轴在0%倍率下的快速移动速度,这个其实一般不需要调整什么。 1422#就是最大切削进给速度(各轴通用的),就是我们F值能设定的最大值。其实这个值就是一个上限值。
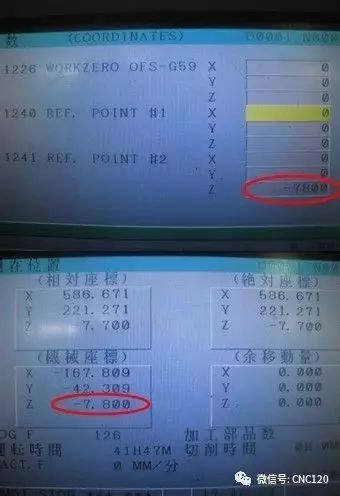
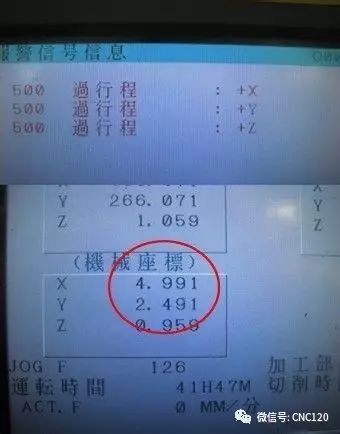
1241#参数,这个参数十分实用,就是机床第二原点设定,一般设备的第二原点就是它的换刀原点,很多设备加工中为提高效率,节省时间,X坐标值和Y坐标值是不设定的(某种特殊情况下要设定,以后会讲到,牵涉到后面的参数,后期再讲),即可在任意位置换刀,但是Z值是一定要设定的,这个位置关系到刀臂卡口和刀具卡紧的位置,图中红色圆圈内的数字-7800就是设备第二原点Z值坐标,该设备换刀时它的Z轴机械坐标一定是与该参数数据相对应的(如下图红色圆圈内所示),大家可以在自己设备换刀的时候,翻看下,了解下。 然后,这个1241#参数Z轴坐标值一般在什么情况下要调整呢? 1.相对编码器回零的设备(即常说的撞块挡板式回零),在更换感应开关后,需要重新设定该参数。 2.绝对编码器回零的设备(绝对编码器回零与相对编码器回零的设备的区别就是,开机后可以不用回零,直接加工,因为原点坐标已经通过绝对值的方式,通过电池储存在CNC里),在重新设定Z轴机械坐标原点后,也要相应的修改该参数。 3.设备误操作,Z轴撞机后,导致Z轴换刀点变化,需要重新设定该参数(其实就是表现在Z轴撞了后,换刀的声音异响,其实这时候换刀点已经产生偏移,久而久之就容易伤刀臂和刀具)。 4.换刀故障,经过检查发现换刀原点跑动后,也要重新设定该参数。
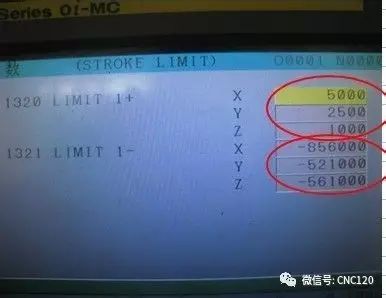
1320#参数,就是我们常说的设备回零软限位位置,是个保护位置,这是个正方向的位置。 1321#参数,就是设定我们各轴丝杆长度,即XYZ 3轴能行走的最长距离,例如根据图片中的数字,我们可以知道该设备X轴行程为850,Y轴行程为520,Z轴行程为560,一般我们在设定该参数时会少设1毫米,作为设备-方向超程报警位置。
看吧,我试着吧3轴用手轮摇到他们正方向超程的位置,这个时候去看机械坐标,这个坐标值一般都不会超过我们1320#设定的参数值,同理负方向也是一样。 如果在100%倍率下快速移动可能会超过1320#参数设定的数值,同样也会出现报警,不过再出现报警就是硬超程了,比较麻烦,不过一般设备都配备相关的超程解除按键。 接着上图的的1320#和1321#参数聊下。 很多朋友可能会说既然这是厂家设定好了得参数,我们都不能动啊 其实,有时候这些参数是要活学活用的,这样我们工作会更有效率,更简洁。 例如1320#参数,相对编码器回零的设备(即常说的撞块挡板式回零),有时候经常会出现每次回零都超程,回零回不好的现象,如果要拆下来修撞块,非常麻烦,而且修完还要修改坐标原点。 例如X方向回零老是显示+方向超程,这时候我们其实可以完全把1320#参数的X值对应的改大一点。 例如上图的5000,我们可以把它改到8000,试下回零,不行,再改到10000试试,一般都能成功回零,成功回零后把参数改回5000就行,不影响正常工作。 因为撞块式的内部卡簧经常因为进水,进了铁屑会导致回零时卡死,但是可能你回次零,撞动它,它又好了,改这个参数要注意,如果你多次改大回零位置参数一直没效果,最后直接硬超程了,就不要尝试这种方法了,把参数改回来,把撞块拆下来修吧。 1321#参数,一般什么时候要修改呢? 比如我们要再设备上装夹个大工件或者夹具,很大,装在设备上可能工作台的后方(Y轴负方向),还悬出了一部分,虽然加工不影响,但是如果员工不小心快速移动设备Y轴负方向,很可能导致夹具或者工件撞在设备的Z轴丝杆防护钣金上。 同理,如果夹具或者工件X负方向伸出过长,误操作则会撞在设备的内部防护钣金上,所以,为了防止员工误操作,我们可以记录夹具或工件与设备快要接触的位置,提前设定1321#参数的负方向超程值,保证两者未相撞之前,系统已经提前报警。说白了,就是把导轨行程缩短。 1.很多程序(例如换刀程序)被设置为09000以后的程序,因为部分是厂家出厂设定的程序,怕使用人员误修改,误删,被隐藏保护起来了,如果我们要修改,查看这些程序怎么办呢,这时候就需要用到3202#.4参数了,吧NE9选项改为0,这样所有的O9000号以后程序我们就可以进行查阅、修改了,不过新手不建议大家去修改,如果要修改也建议先备份下。 其实说白了这个参数:1代表隐藏9000号以后程序。0代表不隐藏9000号以后程序。 2.还有时候我们要再程序里面加注备注的时候,想使用小括号,但是我们面板上的括号,只有[ ]中括号,如果通过电脑里面改再导入到设备上,则很麻烦,这个时候,我们可以修改3204#.0参数。 这个参数就是:1代表面板按键启用小括号。0代表面板按键启用[ ]中括号
************************
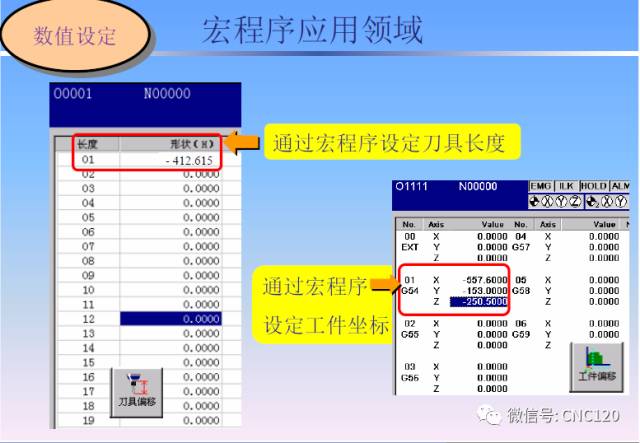
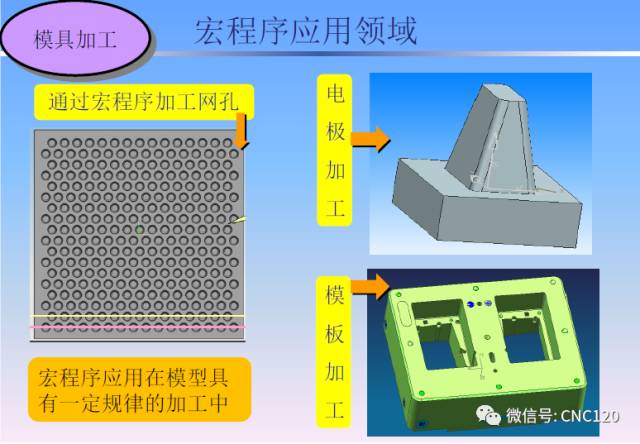
跟清风学《数控宏程序编程》资料简介 学习加微信:Yuki7557 本教程,以FANUC系充为蓝本 简单易学,一看就会,一用就灵 一方面详细讲述了数控(铣削)加工宏程序的理论知识,内容包括:宏程序应用概况,宏程序基础理论,宏程序语句,宏程序功能A的使用规定及特点,宏程序功能B的调用及其它特点等。 另一方面以图文并茂的形式讲解了200多个宏程序实战案例,结合这些案例讨论了一些加工方法。
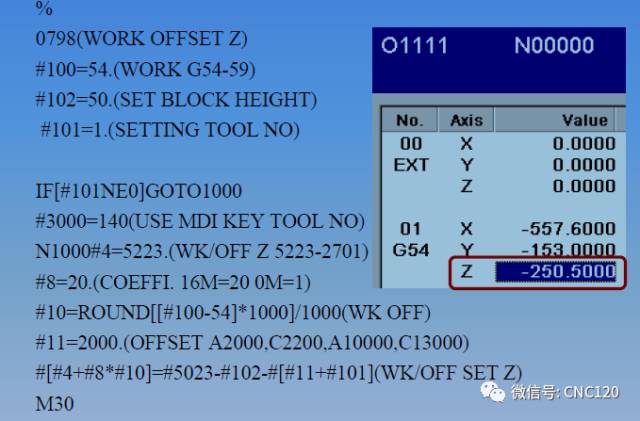
通过宏程序设置坐标系 % 01111(WORK OFFSET Z) #100=54.(WORK G54-59) #102=50.(SET BLOCK HEIGHT) #101=1.(SETTING TOOL NO) IF[#101NE0]GOTO1000 #3000=140(USE MDI KEY TOOL NO) N1000#4=5223.(WK/OFF Z 5223-2701) #8=20.(COEFFI. 16M=20 0M=1) #10=ROUND[[#100-54]*1000]/1000(WK OFF) #11=2000.(OFFSET A2000,C2200,A10000,C13000) #[#4+#8*#10]=#5023-#102-#[#11+#101](WK/OFF SET Z)
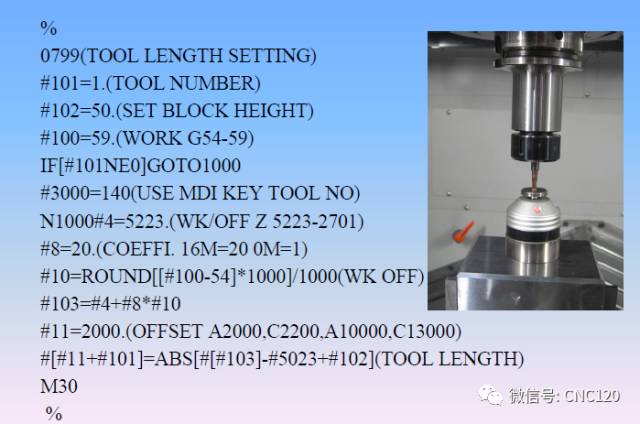
通过宏程序测量刀具长度
|



 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】