| ESP32使用PWM实现对舵机的控制 | 您所在的位置:网站首页 › 舵机控制90°程序 › ESP32使用PWM实现对舵机的控制 |
ESP32使用PWM实现对舵机的控制
|
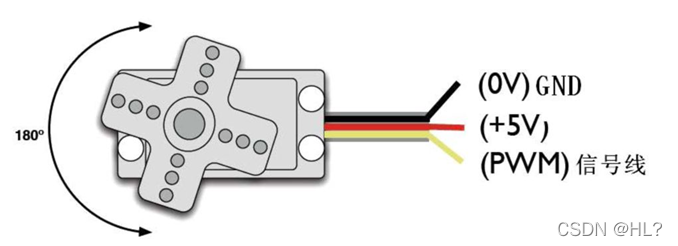
二、什么是舵机 舵机是伺服电机的一种,伺服电机就是带有反馈环节的电机,我们可以通过伺服电机进行精确的位置控制或者输出较高的扭矩; 一般舵机的旋转范围是0°~ 180°。舵机是由可变宽度的脉冲控制。脉冲的参数有最小值、最大值和频率。一般而言,舵机的基准信号周期为20ms,所以频率为50kHz。脉冲宽度和舵机的转角0°~ 180°相对应的。舵机转动角度与占空比的关系:
二、PWM对舵机的控制 舵机的控制就是通过一个固定的频率,给其不同的占空比的,来控制舵机不同的转角 舵机的频率一般为频率为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围。来控制舵机不同的转角 500-2500us的PWM高电平部分对应控制180度舵机的0-180度 以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度;
三、控制函数 1、ledcSetup()函数,设置 LEDC通道对应的频率和计数位数(占空比分辨率) double ledcSetup(uint8_t chan, double freq, uint8_t bit_num)其第一个参数chan表示通道号,取值为0 ~ 15即可设置16个通道,其中高速通道(0 ~ 7)由80MHz时钟驱动,低速通道(8 ~ 15)由 1MHz 时钟驱动;第二个参数freq为期望设置的频率;第三个参数为占空比分辨率的计数位数,其取值为0 ~ 20(该值决定后面 ledcWrite 方法中占空比可写值,比如该值写10,则占空比最大可写1023 即(1 |
【本文地址】
公司简介
联系我们