| 树莓派基础实验39:解析无线电接收机PWM、SBUS信号 | 您所在的位置:网站首页 › 航模遥控器能控制普通玩具吗 › 树莓派基础实验39:解析无线电接收机PWM、SBUS信号 |
树莓派基础实验39:解析无线电接收机PWM、SBUS信号
|
一、介绍
虽然如今或者将来,5G网络的建设带来人工智能和工业自动化的全面升级,生产活动中劳动力的需求大大减少,大量的劳动力将向内容生产行业和服务行业转移。教育、医疗、娱乐、公共管理等诸多领域,乃至整个社会都将迎来巨大变革。可参阅我的一篇读书笔记5G社会:万物互联新时代。 但是,使用传统无线电通信设备通信仍然是非常重要的通信方式,比如无线电台、对讲机,航模、车模、船模遥控等等。与手机移动网络、WIFI连接相比,无线电连接有它独特的优势。 在树莓派基础实验38:逻辑分析仪分析PWM、UART信号中使用逻辑分析仪,对树莓派的PWM信号和UART信号进行分析,从中可以详细了解逻辑分析仪分析的使用方法及PWM信号和UART信号。 本实验中将使用逻辑分析仪、树莓派,对航模无线电接收机输出的PWM信号、SBUS信号进行采集分析,以便树莓派能够接收无线电控制信号,进而可以开发基于无线电控制的树莓派航模飞行控制系统、或者智能小车的无人驾驶系统。 二、组件★Raspberry Pi 3 B+全套*1 ★睿思凯Frsky X8R 接收机*1 ★电平反向器模块*1 ★睿思凯Frsky Taranis X9D PLUS SE2019遥控器*1 ★国产梦源DSLogic Plus逻辑分析仪*1 ★面包板*1(可选) ★40P软排线*1 ★跳线若干 三、实验原理 (一)航模无线电遥控系统本实验中使用的遥控系统可以自行选择其它品牌的产品,如国产的天地飞还不错。 航模的遥控器就是像电视机遥控器、空调遥控器一样可以不用接触到被控设备,而通过一个手持器件,使用无线电与被控设备进行通信,从而达到对设备的控制。 遥控器想到达到与无人机通信的功能需要有两部分配合完成。即:发射器(遥控器)与接收机。遥控器上的控制杆转为无线电波发送给接收机,而接收机通过接收无线电波,读取遥控器上控制杆的读数,并转为数字信号发送到航模的控制器中。
目前用于无人机遥控器主流的无线电频率是2.4G,这样的无线电波的波长更长,可以通信的距离较远,普通2.4G遥控器与接收机的通信距离在空旷的地方大概在1km以内。2.4GHz无线技术如今已经成为了无线产品的主流传输技术。所谓的2.4GHz所指的是一个工作频段2400M-2483M范围,这个频段是全世界免申请使用。 常见的Wifi、蓝牙、ZigBee都是使用的2.4G频率段,只不过他们采用的协议不同,导致其传输速率不同,所以运用的范围就不同。同样是采用2.4G频率作为载波,但不同的通讯协议衍生出的通讯方式会有着天壤之别;仅仅在传输数据量上,就有着从1M每秒到100M每秒的差别。 关于遥控器与无人机的通信协议也有很多种,常见的数据协议如下: 1.pwm:需要在接收机上接上全部pwm输出通道,每一个通道就要接一组线,解析程序需要根据每一个通道的pwm高电平时长(即占空比)计算通道数值。 2.ppm:按固定周期发送所有通道pwm脉宽的数据格式,一组接线,一个周期内发送所有通道的pwm值,解析程序需要自行区分每一个通道的pwm时长。PPM的频率通常是50Hz,周期长度20ms,每一个周期中可以存放最多10路PWM信号,每一路PWM的周期为2ms。 3.sbus:每11个bit位表示一个通道数值的协议,串口通信,但是sbus的接收机通常是反向电平,连接到航模时需要接电平反向器,大部分支持sbus的飞行控制板已经集成了反向器。 4.xbus:常规通信协议,支持18个通道,数据包较大,串口通信有两种模式,可以在遥控器的配置选项中配置。接收机无需做特殊配置。
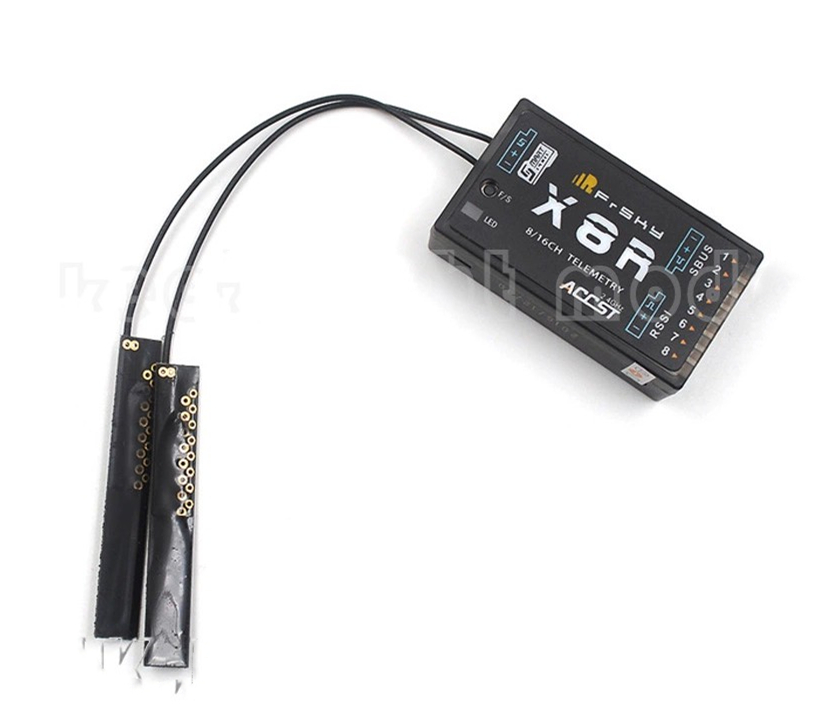
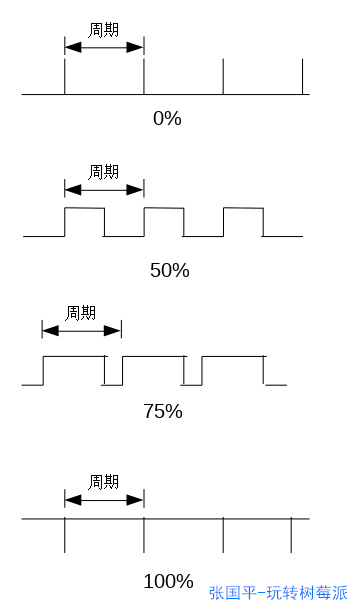
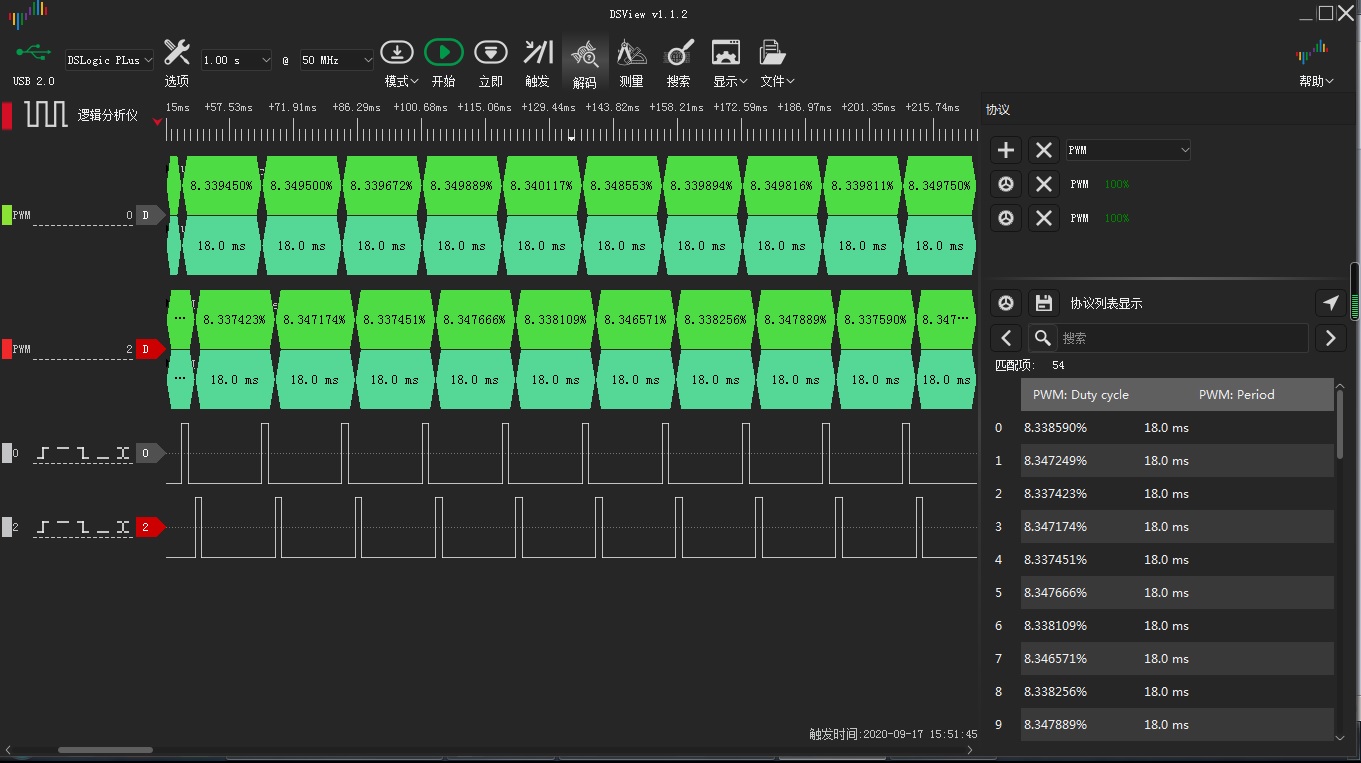
然后,就是电调通过接收接收机输出的这些信号,来将输入的电源转为不同的电压,并输出到电机,从而达到使电机产生不同的转速的目的。有刷电调可以改变电流方向,从而可以改变电机转动方向。而无刷电调却不能改变电机的转动方向,但是可以将直流电转为三相交流电,从而输出到无刷电机上。 所谓电调就是电压调节器,也可以通俗的说成是电机调节器,这里不做过多讲解。 (二)接收机的PWM信号PWM英文全称为(Pulse-width modulation)。也称占空比信号,它表示高电平时长占整个信号周期的比例。 PWM信号的频率是通常是没有规定的,可以是50hz、100hz、200hz或500hz等等。控制频率越高,其周期越短,控制间隔也就越短,电调和电机响应速度也就越快。反之,控制频率越低,其周期就越长,控制间隔就越长,电调和电机的响应速度就越慢。早期电调响应PWM信号的频率是50hz,但随着科技的发展和对控制流畅度的要求,现在多数电调都支持500hz以上的PWM信号,并且电调内部自带滤波器,可以很好的响应并控制电机的转动。 传统的遥控器接收机是采用多路PWM的方式进行输出的,遥控器中有多少个通道,接收机中就有多少路PWM输出,睿思凯Frsky X8R接收机的1-8个PWM输出通道,都是以PWM的形式输出的,这就需要飞控能够采集并解析这些PWM信号,并为飞控所用。 那么,睿思凯Frsky X8R接收机的PWM信号到底是怎样的呢?我们使用逻辑分析仪看看吧,连接好遥控器、接收机、连接逻辑分析仪。
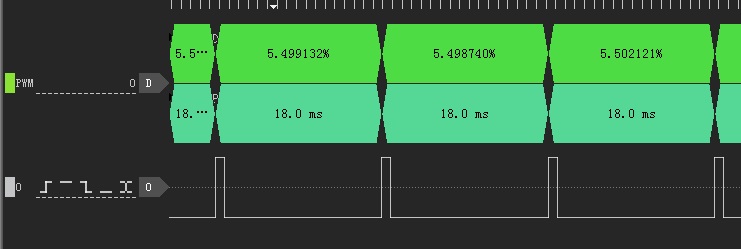
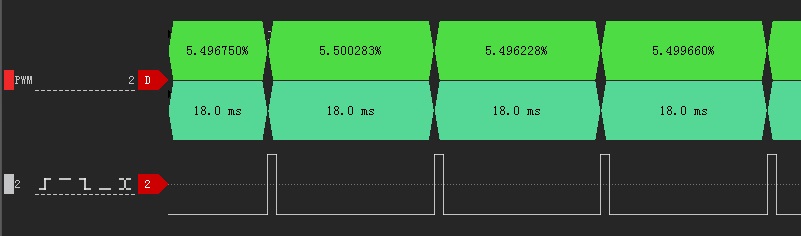
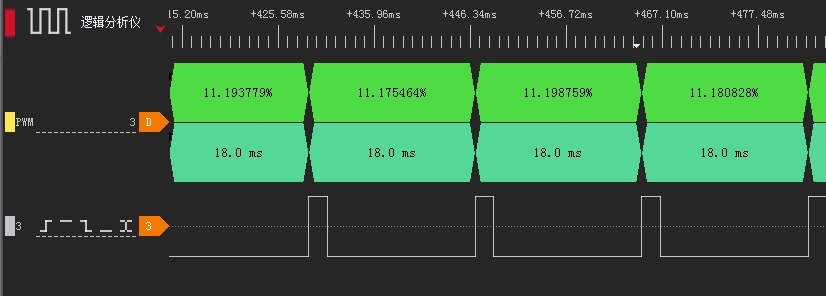
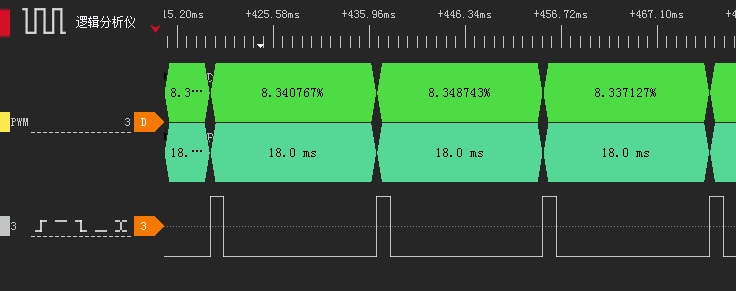
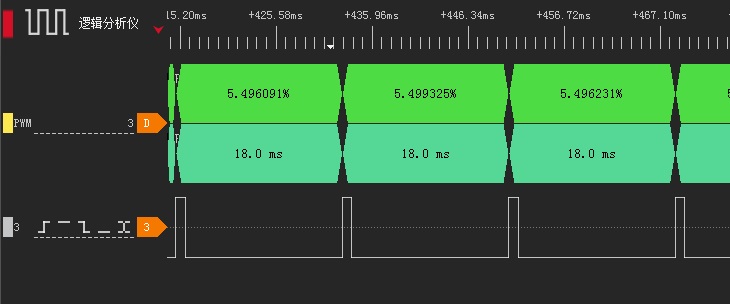
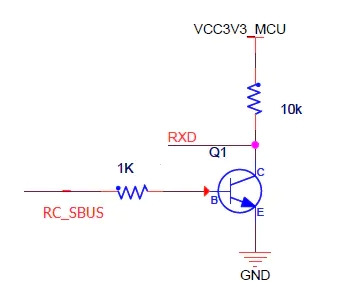
这里我只采集了1、3、5号通道的PWM信号。1号通道是右手油门摇杆左右晃动,会自动回中;3号通道是右手油门摇杆油门控制,由低到高表示油门由小到大,不会回中;5号通道是SA开关,有上中下3个档位。 首先来看1号通道,当摇杆往左摇到底时,占空比约为5.5%,高电平时长为0.99ms,信号周期为18ms。 1号通道,当摇杆往右摇到底时,占空比约为11.2%,高电平时长为2.01ms,信号周期为18ms。 再看3号通道,当摇杆往下摇到底时,油门为0,占空比约为5.5%,高电平时长为0.99ms,信号周期为18ms。 那当他们居中时呢?占空比约为8.3%,高电平时长为1.50ms,信号周期还是为18ms。 5号通道为开关,上中下三档,与1/3通道的高中低三档时的数值一样,占空比依次约为11.2%、8.3%、5.5%,高电平时长依次约为2ms、1.5ms、1ms,信号周期一直是稳定的18ms。 在采集接收机PWM信号时发现,当接收机刚通电时,接收机不输出PWM信号,当遥控器连接成功接收机后,接收机就立马输出遥控器的即时状态信号,所以请注意,连接之前请注意将油门调至0,否则如果电调没有保护机制,螺旋桨会立马飞起来。 无线电波在传输过程中可能受到干扰或是数据丢失等等问题,当接收机无法接收到发射器的数据时,通常会进入保护状态,也就是仍旧向无人机发送控制信号,此时的信号就是接收机收到遥控器发射器最后一次的有效数据。这样因为信号丢失而发送的保护数数据通常叫做failsafe数据。 如果遥控器没有设置failsafe mode,X8R接收机默认HOLD模式,即保持断联之前的信号一直输出;可以在遥控器上设置No pulses模式,指断联后接收机不输出信号;可以在遥控器上设置Custom模式,定制断联后接收机要输出的控制信号,比如降低油门到比较低的程度,以便飞机自动降落。 树莓派输出PWM信号很简单,但是如果我们需要使用树莓派来读取接收机输出的PWM信号值怎么办呢? 我们以第一个通道的PWM为例,讲述树莓派对其处理的具体方法: (1)检测引脚由低点平变为高电平的时刻,并记录当前时间t0,表示高电平开始; (2)检测引脚由高电平变为低点平的时刻,并记录当前时间t1,表示高电平结束; (3)继续检测引脚由低点平变为高电平的时刻,并记录当前时间t2,表示一个PWM周期结束; (4)计算高电平时长 = t1 - t0; (5)计算整个PWM周期 = t2 - t0; (6)计算PWM占空比 = 高电平时长 / PWM周期 每一个遥控器通道都需要一个PWM采集器进行采集,但是对于树莓派来说不可能使用多个定时器来采集多个通道的PWM,这对于树莓派的资源来说十分浪费,因此我优先采用的就是SBUS编码,可以在一个管脚中传输多路控制信号。 (三)SBUS信号 1.介绍S.BUS是FUTABA提出的舵机控制总线,全称Serial Bus,别名S-BUS或SBUS,也称 Futaba S.BUS。 S-BUS其实是一种串口通信协议,采用100000的波特率,数据位点8bits,停止位点2bits,偶效验,即8E2的串口通信。但是S-BUS采用的是反向电平传输,也就是说,在S-BUS的发送端高低电平是反向的,协议中的所有高电平都被转换成低电平,协议中的所有低电平都被转换成高电平。所以在S-BUS的接收端需要增加一个高低电平反向器来进行电平反转。
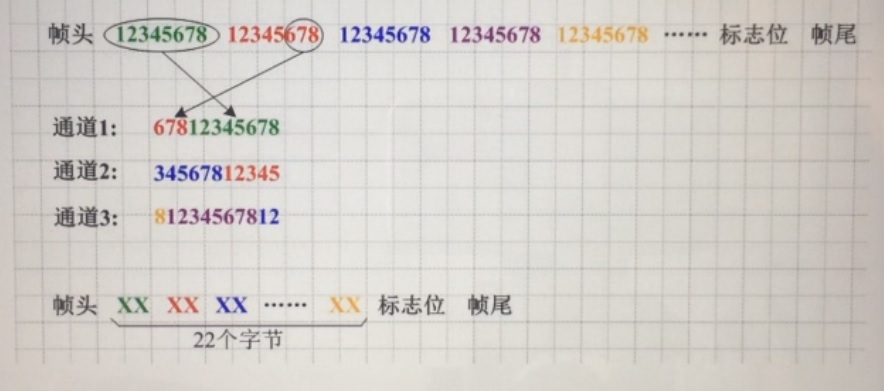
实际上,有的飞控板上已经集成了反向器,所以对于使用这种飞控的用户来说,可以忽略掉S-BUS的反向机制,但是对于其它没有集成S-BUS反向器的硬件平台上,就需要使用者增加一个反向器来处理数据,否则将无法读取协议数据。 另外,100000的波特率并不是标准的波特率,这在一些只支持标准波特率的系统上无法实现,我们可以通过对设备节点的配置实现波特率的设定。 通信接口:USART(TTL) 通信参数:1个起始位+8个数据位+偶校验位+2个停止位,无控流,25个字节,波特率=100000bit/s,电平逻辑反转。 X6R的SBUS通信速率:每6ms间隔发送数据,每数据帧时长为3ms。 数据帧格式: 需要注意的是S-BUS中用11bits来表示一个遥控器通道的数值,22个字节就可以表示16通道(8 × 22 = 11 ×16)。11个bit可以表示的数值范围为0~2047。 每帧25个字节,排列如下: [start byte] [data1] [data2] [data3] … [data22] [flag] [end byte] 简单来说就是,通道1数据在前,通道16数据最后;每通道的数据,低位在前面的字节中,高位在后面的字节中;每8bit数据中,低位是上一通道的数据,高位是下一通道的数据。 start byte = 0x0F CH1 = [data2]的低3位 + [data1]的8位 (678 + 12345678 = 678,12345678) CH2 = [data3]的低6位 + [data2]的高5位 (345678 + 12345 = 345678,12345 ) CH3 = [data5]的低1位 + [data4]的8位 + [data3]的高2位 (8 + 12345678 + 12 = 8,12345678,12) … … flag(由高位到低位:N/A N/A N/A N/A 故障保护激活位 帧丢失位 数字通道CH18 数字通道CH17 ) end byte = 0x00 2.未做电平反向时的SBUS信号
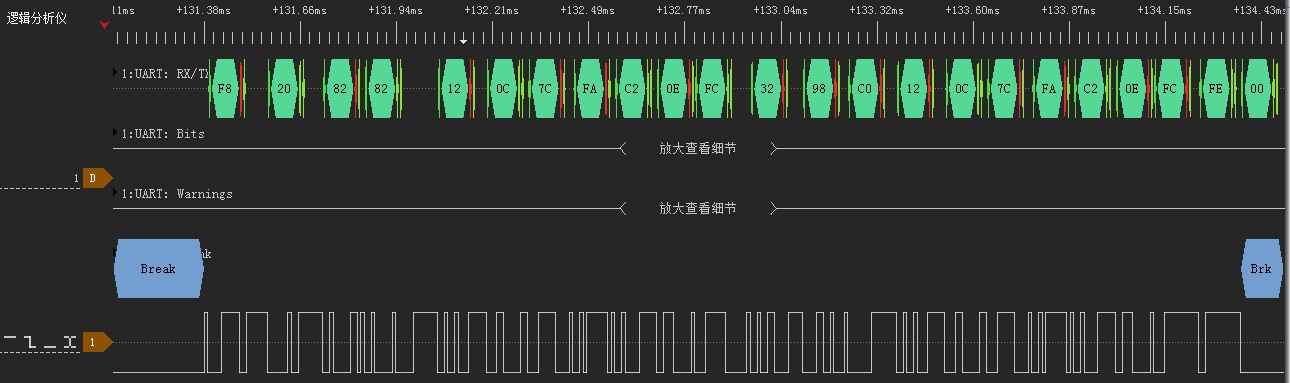
可以看出字节数不对,只解析出23字节,起始字节不是正确的0x0F,而是0xF8,还有红色的PE(Frame error)帧错误,即是乱码。
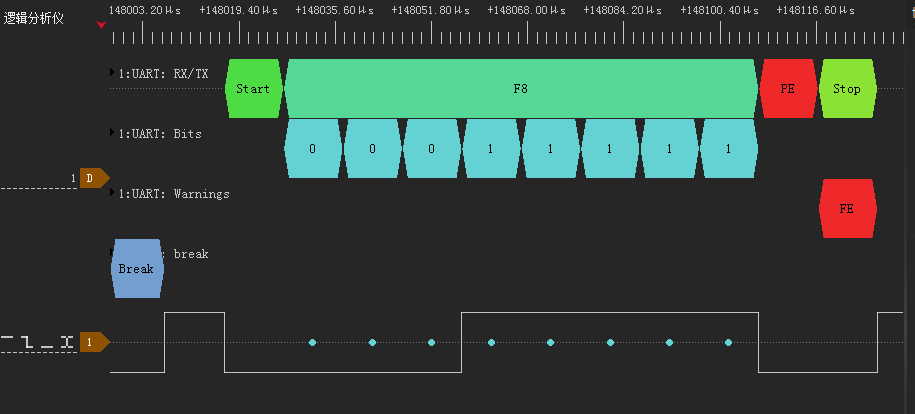
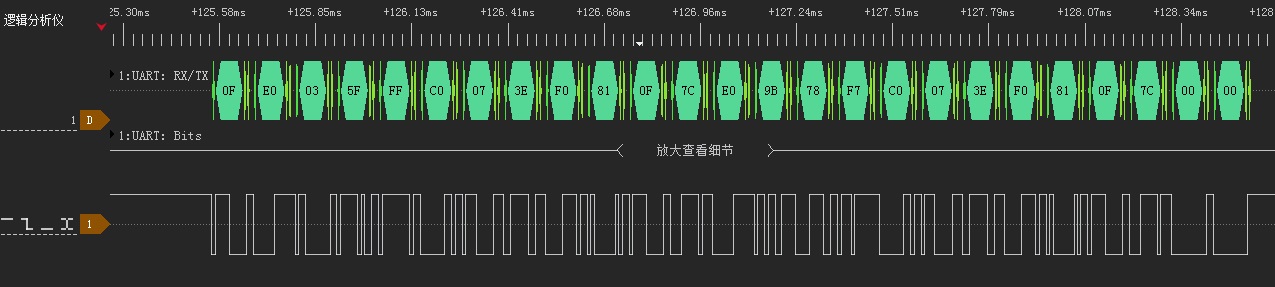
可以看出一帧数据为25字节,起始字节是正确的0x0F,结束字节为0x00。 再详细分析起始字节,要搞清楚每个字节的含义,先弄清UART的数据通信的字节格式:
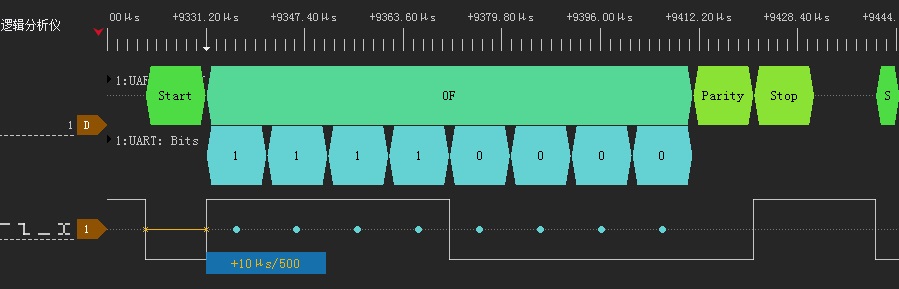
其中各位的意义如下: 起始位:先发出一个逻辑”0”信号,表示传输字符的开始。 数据位:可以是5~8位逻辑”0”或”1”。如ASCII码(7位),扩展BCD码(8位),小端传输。 校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验) 停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。 空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。 传输方向:即数据是从高位(MSB)开始传输还是从低位(LSB)开始传输,X8R是从低位开始传输的。
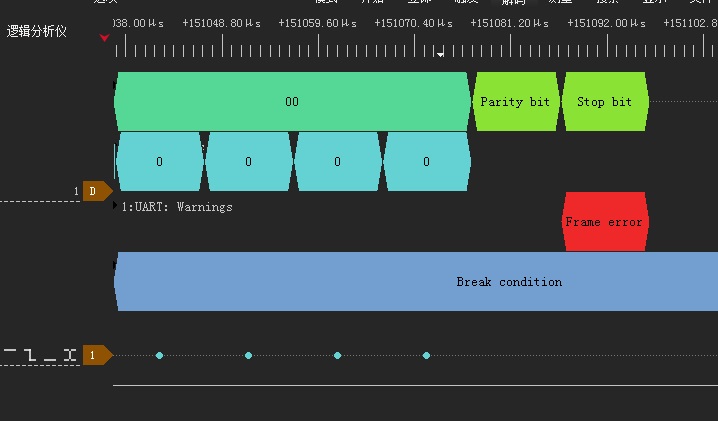
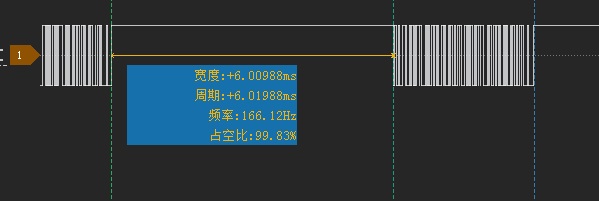
波特率:上图中可以看出每位的时长是10us,意思就是每秒传输100000比特位数(bit),即波特率为100000。 起始位:先发出一个逻辑”0”的信号,即低电平,表示传输数据的开始。 数据位:SBUS信号明显为8位。 校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性。SBUS为偶校验,起始字节数据位中已有4个“1”,所以偶校验位为0。 停止位:它是一帧数据的结束标志。可以是1bit、1.5bit、2bit的空闲电平。SBUS信号是2位停止位,即2位高电平。 空闲位:没有数据传输时线路上的电平状态。为逻辑1。 传输方向:uart传输数据的顺序就是:刚开始传输一个起始位,接着传输数据位,接着传输校验位(可不需要此位),最后传输停止位。这样一帧的数据就传输完了。所以上图中Bits显示的11110000,是从左到右是由低到高位显示的,其值实际上是B00001111=0x0F。 帧间隔:即传送数据的帧与帧之间的间隔大小,这里的间隔为6ms,每帧的周期可以以位为计量也可以用时间,(起始1位+数据8位+校验1位+中止2位=12位) x 25字节=300位,每位时长为10us x 300位=3000us=3ms。 为模拟接收机与遥控器失联后的状态,关闭遥控器的过程中,用逻辑分析仪分析了第24个字节的变化情况,在断开连接的前900ms内,帧丢失位由0变为1,即第24个字节值为0x04。
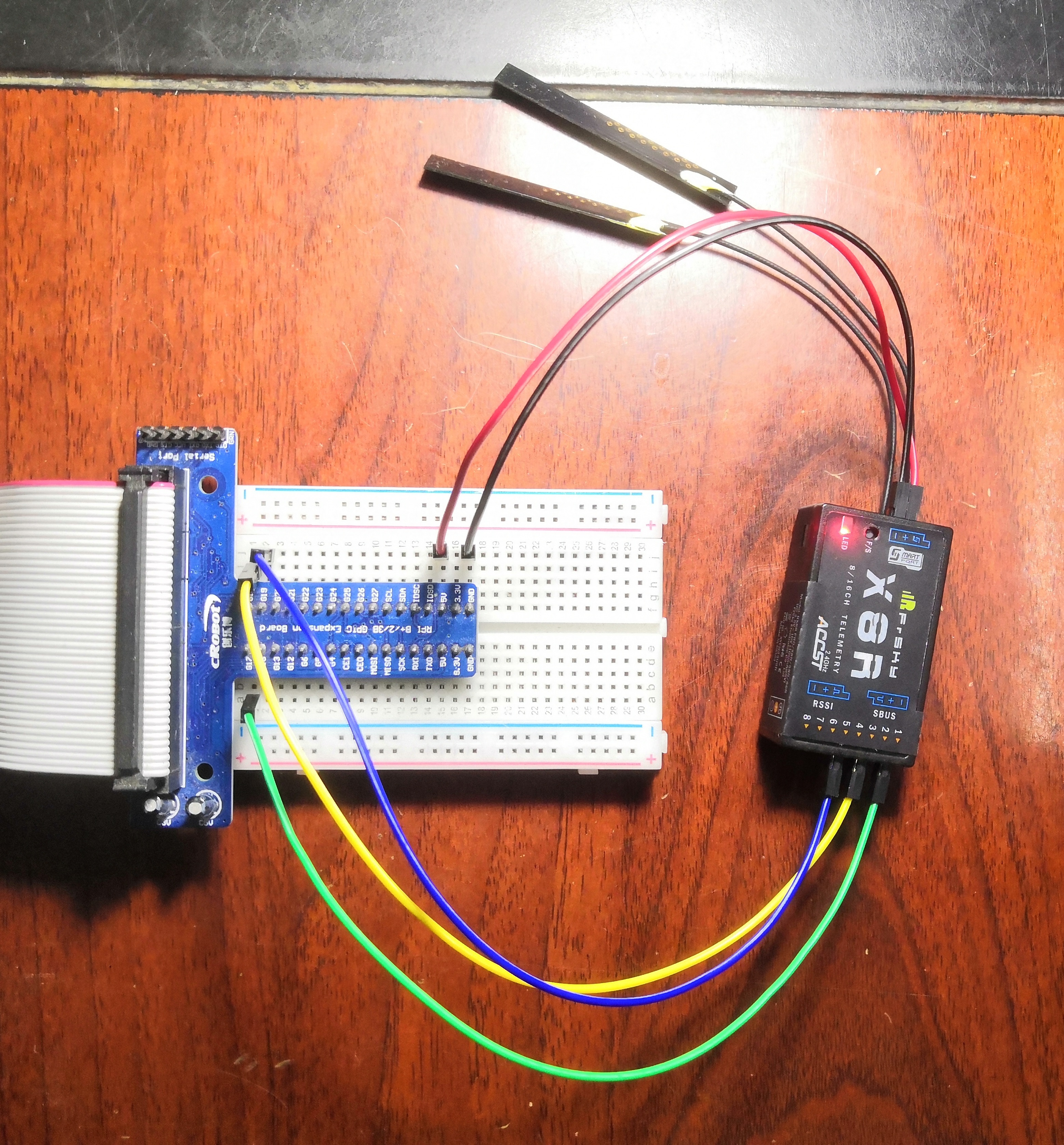
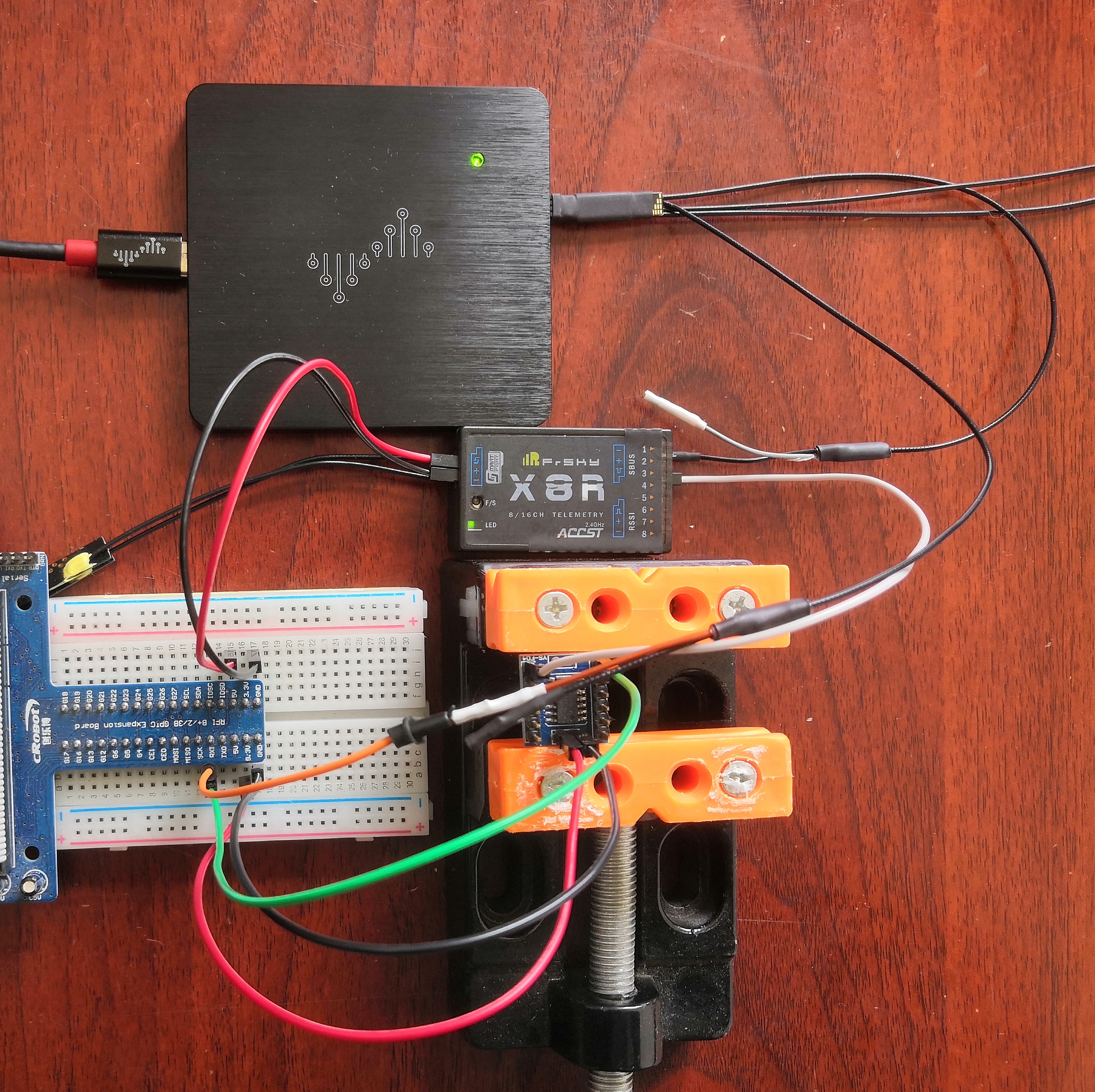
比如我设置的为No pulses(无脉冲),所有的通道值变为0。 连线很简单,电路图就没画了,接收机上端接出的两个黑色细长薄片是天线。
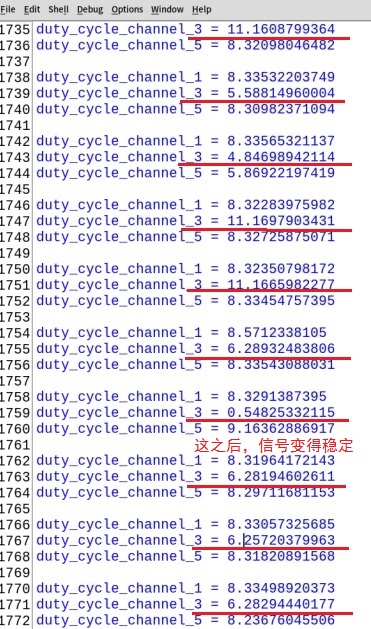
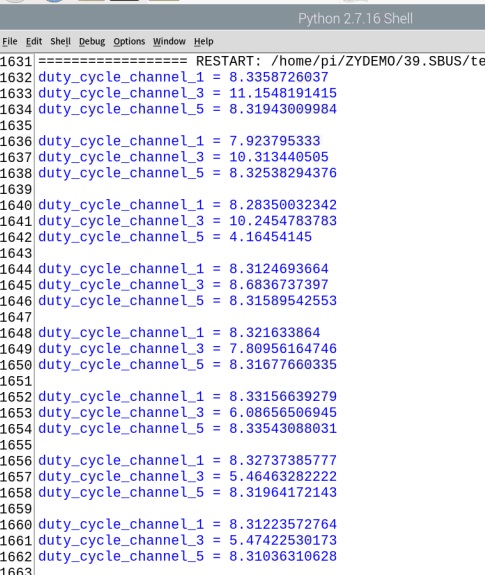 当遥控器与接收机失联时,我定制了failsafe数据,油门降低。3号通道的占空比在开始失联的时候有抖动,约3秒钟后稳定在设置的6.3%左右。 当遥控器与接收机失联时,我定制了failsafe数据,油门降低。3号通道的占空比在开始失联的时候有抖动,约3秒钟后稳定在设置的6.3%左右。
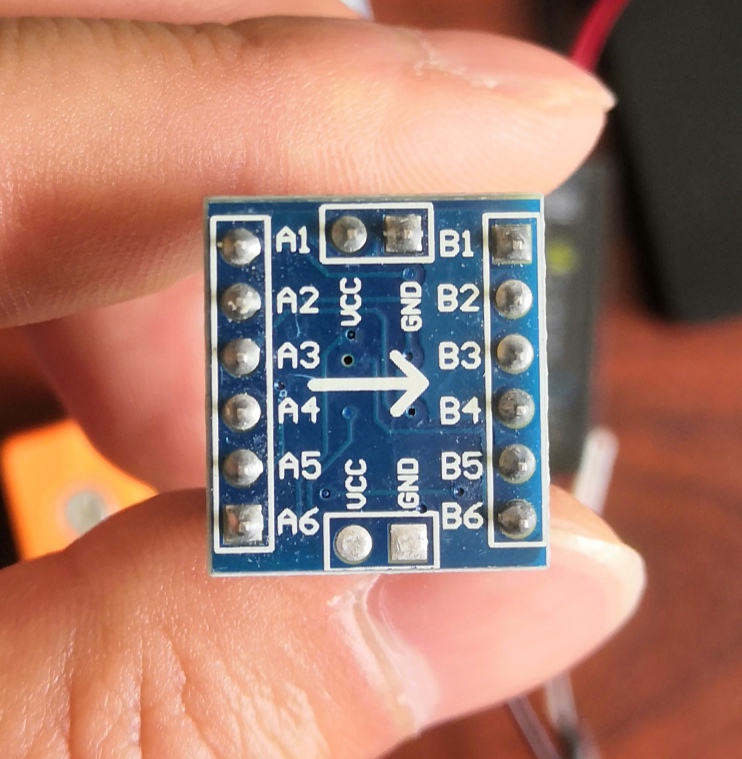
电平反相模块很便宜,某宝5元一个能买到6路的电平反相器。注意反向后的高电平是几伏,反相器的VCC就接几伏的电源,树莓派GPIO接收3.3V高电平,不能接收5V高电平,所以这里电平反向模块的VCC只能接3.3V电源。
|



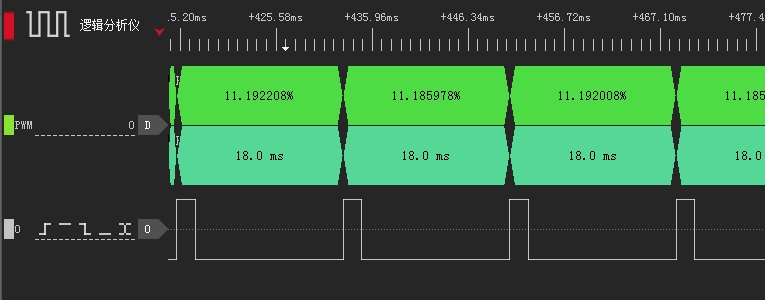
 3号通道,当摇杆往上摇到底时,油门为最大,占空比约为11.2%,高电平时长为2.01ms,信号周期为18ms。
3号通道,当摇杆往上摇到底时,油门为最大,占空比约为11.2%,高电平时长为2.01ms,信号周期为18ms。 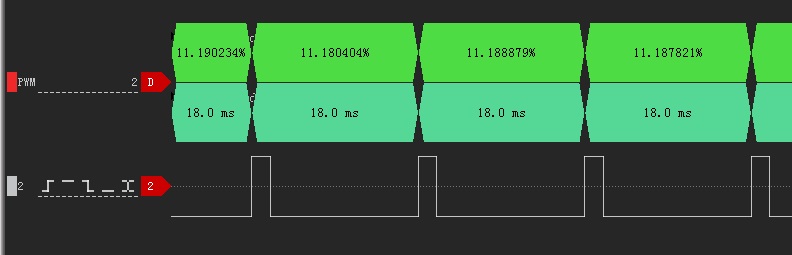

 每帧数据时长为2.990ms,有10us的误差,应该是3ms:
每帧数据时长为2.990ms,有10us的误差,应该是3ms: 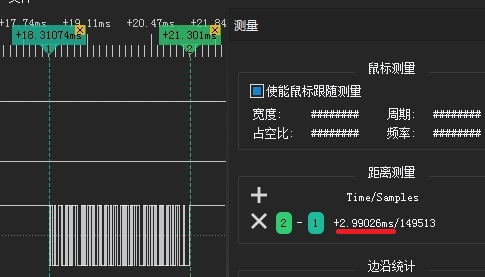
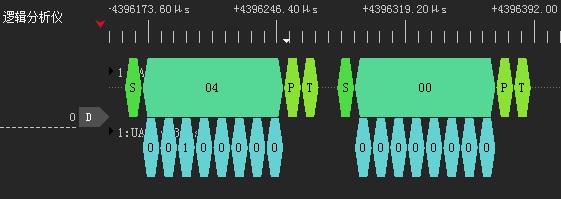 之后,故障保护激活位由0变为1,帧丢失位仍为1,即第24个字节值为0x0C,此时如果设置了failsafe数据,接收机就按照failsafe数据输出信号。
之后,故障保护激活位由0变为1,帧丢失位仍为1,即第24个字节值为0x0C,此时如果设置了failsafe数据,接收机就按照failsafe数据输出信号。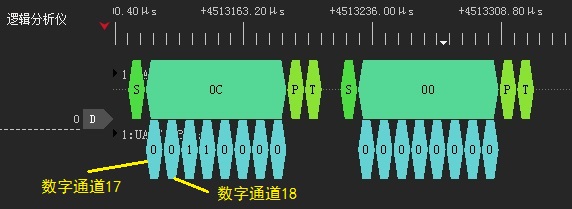

【本文地址】