| 规划控制 | 您所在的位置:网站首页 › 自动驾驶规划控制 › 规划控制 |
规划控制
|
Fig.2 A* 与Hybrid-A* 节点拓展示意图 Hybrid-A*算法在规划路径时主要分为如下几个步骤: 搜索空间的离散化:将空间划分成小网格(grid); 搜索树的扩展(Analytic Expansions):利用RS/Dubins等曲线连接当前节点与目标节点,并对该轨迹进行碰撞检测,若无碰撞,则结束搜索,其规划轨迹为当前路径到目标节点的path1+当前节点回溯到起始节点的路径path2;若碰撞,则放弃该曲线,并从Open List中重新寻找节点,继续搜索; 路径优化:经过Hybrid-A*得出的路径往往不是最优的,通常存在不必要的转向,为了获得更好的预期驾驶行为,还需对轨迹进行进一步优化(如轨迹平滑/插值等);
Fig.3 梯度下降法平滑轨迹 启发式的选择 启发式的选择 对于A* 算法而言,在某一结点n处的代价函数可以表示为: f(n) = g(n) + h(n) 式中,g(n)为状态空间中从初始点到当前节点n的实际代价; ------h(n)为当前节点n到目标节点最佳路径的估计代价; 在代价函数的选择上,Hybrid-A*结合实际运行情况以及车辆当前的位姿,对车辆的航向、档位、曲率以及方向等施加惩罚,使其更符合实际运动场景。 在A* 算法中,启发式一般采用两个节点间的距离之和,而Hybrid-A*算法完善了启发式函数h的定义,主要采用了如下两种启发式以提高搜索效率。 non-holonomic-without-obstacles-heuristic:考虑车辆的运动约束但不考虑障碍物,一般使用RS曲线、Dubins曲线等; holonomic-with-obstacles-heuristic:考虑障碍物,不考虑车辆的运动约束;
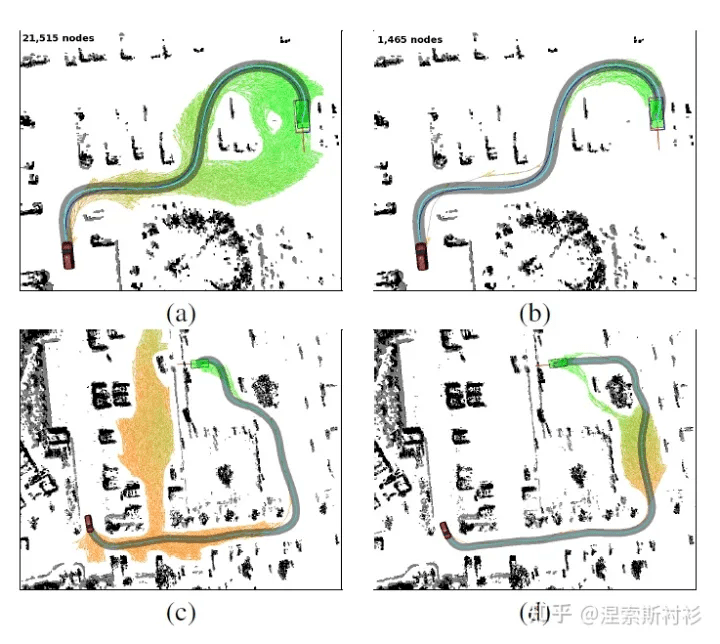
Fig.4 启发式对比 项目参考 项目参考 [1] karlkurzer/path_planner 该项目为karl kurzer的硕士课题,其论文及链接:Path Planning in Unstructured Environments: A Real-time Hybrid A* Implementation for Fast and Deterministic Path Generation for the KTH Research Concept Vehicle
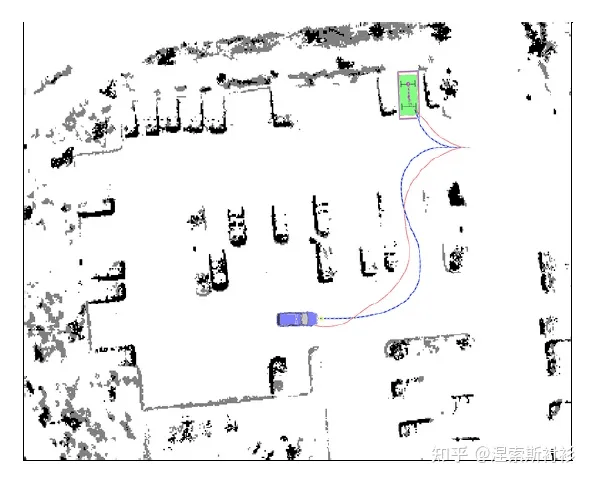
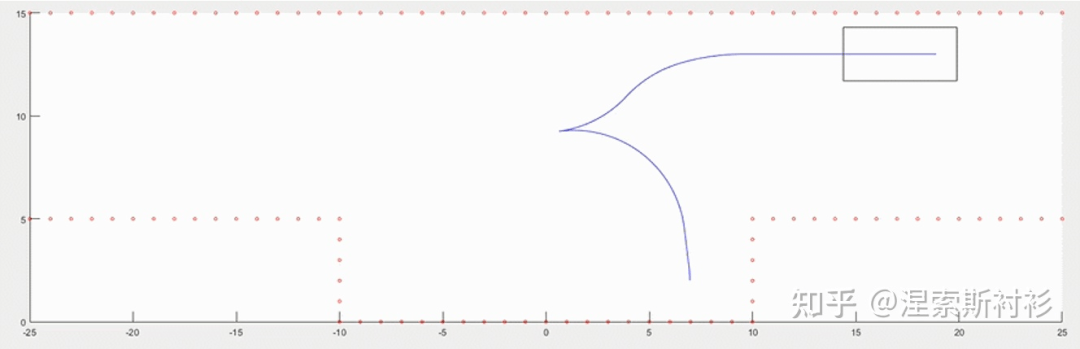
Fig.5 规划轨迹 [2] HAStar_ParkingPlanner 该项目主要是基于Apollo开源项目中Hybrid A* 算法实现泊车的路径规划方法,分别进行了垂直和水平车位的测试,算是一个阉割版,效果有待提升。
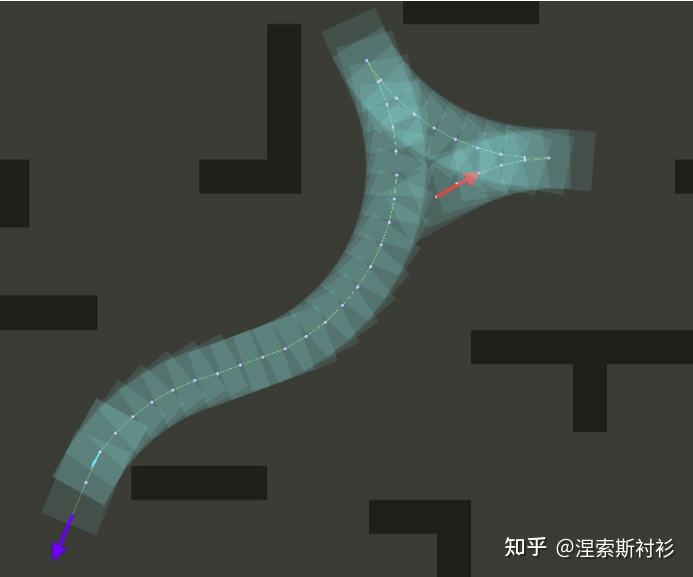
Fig.6 垂直车位 [3] Matlab Hybrid_A* 该项目为Hybrid- A*的Matlab版本实现,对于理解其实现的原理比较有帮组。
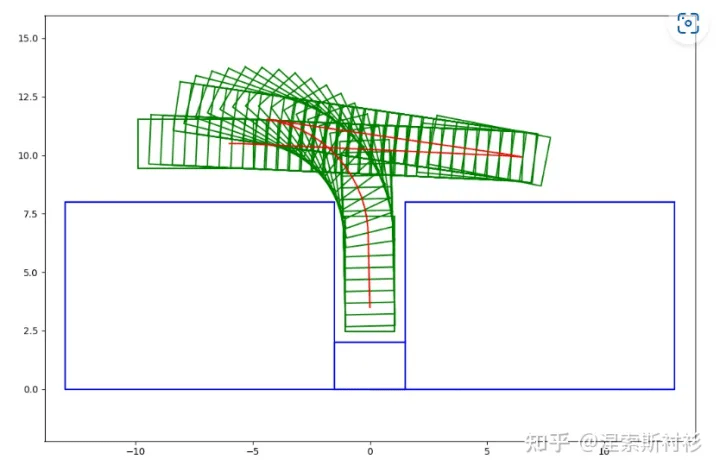
Fig.7 泊车示意图 参考文献 参考文献 [1] Dolgov D , Thrun S , Montemerlo M , et al. Practical Search Techniques in Path Planning for Autonomous Driving[J]. ann arbor, 2008. [2] Dolgov D , Thrun S , Montemerlo M , et al. Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments[J]. The International Journal of Robotics Research, 2010, 29(5):485-501. [3]古月居_混合A*算法研究 [4] 自动驾驶运动规划-Hybird A*算法 [5] Gradient-Informed Path Smoothing for Wheeled Mobile Robots (GRIPS) (github.com) 学机器人SLAM/3D视觉,就上 cvlife.net ! 点击领取学习资料 → 机器人SLAM学习资料大礼包 独家重磅课程官网:cvlife.net 全国最大的机器人SLAM开发者社区 技术交流群 — 版权声明 — 本公众号原创内容版权属计算机视觉life所有;从公开渠道收集、整理及授权转载的非原创文字、图片和音视频资料,版权属原作者。如果侵权,请联系我们,会及时删除。返回搜狐,查看更多 |
【本文地址】