| 智能寻迹(循迹)小车项目思路 + 代码 | 您所在的位置:网站首页 › 自动寻路算法 › 智能寻迹(循迹)小车项目思路 + 代码 |
智能寻迹(循迹)小车项目思路 + 代码
|
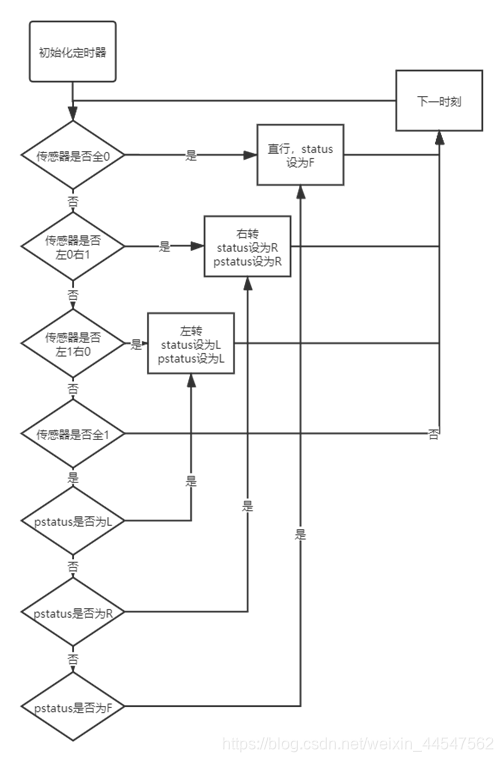
说是智能循迹小车,其实一点也不智能,仅仅是几个判断语句而已。更高级的可以使用PID算法控制小车双轮的转速,从而实现智能小车控制。 作为一个项目作业,完成后想删掉的,但是感觉有些可惜,故发布于博客上以便于其他人参考。 使用两个红外线接收器接受红外线探测到的黑色轨迹,实现转大小弯,直角(因为直角处轨迹宽度超过了探测器的宽度,所以有一些额外处理),但是无法通过锐角。 遇到转弯的时候就将直行的速度降低到最高速度的slow%,以防止小车冲出弯道。保持直行状态达到speedUp时间后,在fullGear-speedUp时间内将速度提升到最高,用来提升小车平均速度。每时每刻保存前一个转向状态,在传感器全为黑时执行保存的转向,以达到通过直角弯道的目的。 流程图如下 完整代码如下 #include #include #define uint unsigned int #define uchar unsigned char // 电机部分 sbit P00 = P0^0; sbit P01 = P0^1; sbit P02 = P0^2; sbit P03 = P0^3; sbit P04 = P0^4; // 左电机使能 sbit P05 = P0^5; // 右电机使能 // 显像器部分 sbit P20 = P2^0; sbit P21 = P2^1; sbit P22 = P2^2; sbit P23 = P2^3; sbit P24 = P2^4; sbit P25 = P2^5; sbit P26 = P2^6; sbit P27 = P2^7; // 红外部分 sbit P33 = P3^3; sbit P35 = P3^5; // 左边红外 sbit P36 = P3^6; // 右侧红外 uint num; // 计数器 uint pwmR; uint pwmL; // 其它参数 uint speedUp = 5000; // 开始加速的直行时间 uint fullGear = 8000; // 加速到满速的时间 uint slow = 60; // 遇到转弯时的直行速度 uint delayMs = 0; // 转弯延迟时间 unsigned long count = 0; uchar status = 'F'; uchar pstatus = 'F'; int flag = 0; // 为0时代表全速,为1时代表转弯 void init(); void leftFdw(); void leftBack(); void rightFdw(); void rightBack(); void back(); void forward(); void turnLeft(); void turnRight(); void stop(); void closeLight(); void delayms(uint); void printChar(uchar x); void motorsWrite(int speedL, int speedR); /*************************** 车轮控制基本程序 ***************************/ void leftFdw(){ // 左轮前进 P00 = 1;P01 = 0; } void leftBack(){ // 左轮后退 P00 = 0;P01 = 1; } void rightFdw(){ // 右轮前进 P02 = 1;P03 = 0; } void rightBack(){ // 右轮后退 P02 = 0;P03 = 1; } /*************************** 方向控制程序 ***************************/ void turnLeft(){ // 左转 status = 'L'; printChar('L'); motorsWrite(0, 90); } void turnRLeft(){ // 左转 status = 'L'; printChar('L'); motorsWrite(-70, 100); } void turnRight(){ // 右转 status = 'R'; printChar('R'); motorsWrite(90, 0); } void turnRRight(){ // 右转 status = 'R'; printChar('R'); motorsWrite(100, -70); } void forward(){ // 前进 status = 'F'; printChar('F'); if(flag){ // 转弯 motorsWrite(slow,slow); } else { // 直线加速 uint dSpeed = slow; motorsWrite(dSpeed,dSpeed); } } void back(){ // 后退 status = 'B'; printChar('B'); motorsWrite(-100,-100); } void stop(){ // 停车 status = 'S'; printChar('S'); motorsWrite(0,0); } /********************** 延时程序 **********************/ void delayms(unsigned int xms){ unsigned int i,j; for(i=xms;i>0;i--) for(j=110;j>0;j--); } /********************** 数码管显示程序 **********************/ void closeLight(){ P21 = 1;P22 = 1;P23 = 1;P24 = 1;P25 = 1;P26 = 1;P27 = 1; } void printChar(uchar x){ closeLight(); // if(x == 'L'){ // P22 = 0;P23 = 0;P24 = 0; // } else if(x == 'R'){ // P22 = 0;P23 = 0;P27 = 0; // } else if(x == 'F'){ // P21 = 0;P22 = 0;P23 = 0;P27 = 0; // } else if(x == 'B'){ // P21 = 0;P22 = 0;P23 = 0;P24 = 0;P25 = 0; // } else if(x == 'S'){ // P21 = 0;P24 = 0;P27 = 0; // } } /********************** 电机控制程序 **********************/ void motorsWrite(int speedL, int speedR){ // 电机控制 if(speedL > 100) speedL=100; if(speedR > 100) speedR=100; if(speedL pwmL = speedL; leftFdw(); } if(speedR pwmR = speedR; rightFdw(); } } void init(){ // PWM控制程序 // 100us计时器 TMOD = 0x01; // 定时器0模式1 TH0 = 0x0FF; // 定时器0的高八位 TL0 = 0x0A4; //TF0;// 如果定时器中断(溢出),则TF0=1; EA = 1; ET0 = 1; TR0 = 1; // 表示开启定时器0 } void main(){ init(); while(1){ if(P35 == 0 && P36 == 0){ forward(); } else if(P35 == 0 && P36 == 1){ turnRight(); flag = 1; pstatus = 'R'; } else if(P35 == 1 && P36 == 0){ turnLeft(); flag = 1; pstatus = 'L'; } else if(P35 == 1 && P36 == 1){ if(pstatus == 'F'){ forward(); } else if(pstatus == 'R'){ turnRRight(); delayms(delayMs); } else if(pstatus == 'L'){ turnRLeft(); delayms(delayMs); } } } } void Timer0Interrupt(void) interrupt 1 { TH0 = 0x0FF; TL0 = 0x0A4; if(num count = 0; } if(count == speedUp && status == 'F') { flag = 0; } } |
【本文地址】
公司简介
联系我们
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |