| 图像数学形态学的基本原理与代码实现(腐蚀、膨胀、开闭运算) | 您所在的位置:网站首页 › 腐蚀膨胀计算方法是什么 › 图像数学形态学的基本原理与代码实现(腐蚀、膨胀、开闭运算) |
图像数学形态学的基本原理与代码实现(腐蚀、膨胀、开闭运算)
|
图像数学形态学的基本原理与代码实现(腐蚀、膨胀、开闭运算)
文章目录
图像数学形态学的基本原理与代码实现(腐蚀、膨胀、开闭运算)1. 集合基础2. 腐蚀(erode)2.1 集合描述2.2 通俗理解
3. 膨胀(dilate)3.1 集合描述3.2 通俗理解
4. 代码实现5.其他
1. 集合基础
集合是由一个或多个确定元素所构成的整体。
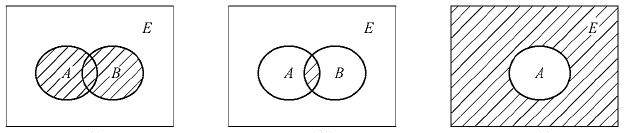
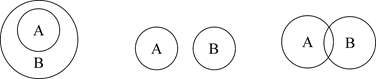
包含:A 的元素全部在 B 中; A ∩ B = A A\cap B = A A∩B=A; A ⊆ B A\subseteq B A⊆B 相离:A 与 B 没有共同元素; A ∩ B = ∅ A\cap B = \varnothing A∩B=∅; 相交:A 与 B 相同元素; A ∩ B ≠ ∅ A\cap B \neq \varnothing A∩B=∅ 映像:所有元素取反组成的集合;记为 A ^ = { x ∣ x = − a , a ∈ A } \hat A = \{x| x=-a,a\in A\} A^={x∣x=−a,a∈A} 平移:所有元素平移 x,记为 ( A ) x = { y ∣ y = a + x , a ∈ A } (A)_x = \{y|y = a+x,a\in A\} (A)x={y∣y=a+x,a∈A} 2. 腐蚀(erode) 2.1 集合描述使用相关集合知识定义为: A, B 为 Z 2 Z^2 Z2 的集合,A 被 B腐蚀,记为 A ⊖ B A\ominus B A⊖B,则腐蚀定义为 A ⊖ B = { x ∣ ( B ) x ⊆ A } A\ominus B = \{x\mid (B)_x \subseteq A \} A⊖B={x∣(B)x⊆A} 2.2 通俗理解过程 B 通常称为核,A 假设为 10x10 像素的二值图中1区域
对于核 B ,中心点坐标即为原点(0,0),对于 A,左上角第一个元素坐标为 (1,1),像素值记 I ( 1 , 1 ) = 0 I(1,1) = 0 I(1,1)=0。 不考虑 padding ,那么核 B 在 A 上遍历,即进行 B 的平移操作,那么第一个平移坐标 x 即为 (2,2),对应图像如下
根据集合定义 A ⊖ B = { x ∣ ( B ) x ⊆ A } A\ominus B = \{x\mid (B)_x \subseteq A \} A⊖B={x∣(B)x⊆A} ,对于此时 x = (2,2), ( B ) x (B)_x (B)x即为淡红色区域,明显不包含于 A,因此(2,2)处值仍为后景像素值0,即 I ( 2 , 2 ) = 0 I(2,2) = 0 I(2,2)=0 按照此规则运算,直至到 x=(4,3),即达到 A 区域内的像素,此时如下
同样按照定义,此时 ( B ) x (B)_x (B)x 与 A 有交集,但仍旧不完全包含于 A,因此(4,3)处值为后景像素值0,即 I ( 4 , 3 ) I(4,3) I(4,3) 由 1 变为 0,就是腐蚀操作。 未被腐蚀的第一个 A 元素坐标为 (5,4),此时如下
此时满足 ( B ) x ⊆ A (B)_x \subseteq A (B)x⊆A , I ( 5 , 4 ) I(5,4) I(5,4) 仍为前景像素值 1. 按照此操作运算,可以得到最终结果
总结 遍历过程中,只有 B 完全在 A 内部,中心点所在坐标仍保留为 前景值1,其他全部为后景像素值 0 3. 膨胀(dilate) 3.1 集合描述使用相关集合知识的定义为: A, B 为 Z 2 Z^2 Z2 的集合,A 被 B 膨胀,记为 A ⊕ B A\oplus B A⊕B,则膨胀定义为 A ⊕ B = { x ∣ ( B ^ ) x ∩ A ⊆ A } A\oplus B = \{x\mid (\hat B)_x\cap A \subseteq A \} A⊕B={x∣(B^)x∩A⊆A} 3.2 通俗理解过程 过程可与腐蚀过程类比理解,值得说明的是,因为 B 定义中心点坐标为 (0,0), B ^ \hat B B^ 为元素原点对称后的集合,也即为B。 第一个膨胀点坐标是 (3,2),此时如下
根据集合定义, ( B ^ ) x ∩ A (\hat B)_x\cap A (B^)x∩A 即为 A 左上角第一个元素,此时满足 ( B ^ ) x ∩ A ⊆ A (\hat B)_x\cap A \subseteq A (B^)x∩A⊆A,则 I ( 3 , 2 ) I(3,2) I(3,2) 的元素值由后景像素值 0 变为前景像素值 1,也即膨胀操作。 最后结果
总结 遍历移动过程中, B 与 A 只要有交集,则 B 的中心位置像素值设定为 前景值1 。 4. 代码实现代码 腐蚀和膨胀操作理论上是等同的,只是同一操作下前景与后景的置换(上述例子中,对 1 区域的膨胀就等价与对 0 区域的腐蚀),因此代码可以归到一起。 使用python实现二维下的腐蚀和膨胀操作: import numpy as np import cv2 def morphology_2d(img, kenel, value = 1, ispadding = True): kenelx = int(kenel.shape[0]/2) kenely = int(kenel.shape[1]/2) tempImg = img.copy() if ispadding: imgPadding = np.pad(img, ((kenelx, kenelx), (kenely,kenely)), mode='edge') for x in range(img.shape[0]): for y in range(img.shape[1]): b = 0 for i in range(-kenelx, kenelx+1): if b: break for j in range(-kenely, kenely+1): if kenel[kenelx+i, kenely+j] == 1 and imgPadding[x+i, y+j] == value: tempImg[x, y] = value b = 1 break return tempImg def erode_2d(img, kenel): return morphology_2d(img, kenel, value = 0) def dilate_2d(img, kenel): return morphology_2d(img, kenel, value = 255) if __name__ == '__main__': img = cv2.imread('./plus.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, img = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) img = np.uint8(img) kernel = np.ones((13,13)) # 自编程 erode = erode_2d(img, kernel) dilate = dilate_2d(img, kernel) # opencv库函数 erosion = cv2.erode(img,kernel,iterations = 1) dilation = cv2.dilate(img, kernel, iterations = 1) cv2.imshow('img', img) # 原图 cv2.imshow('erode', erode) # 自编程腐蚀 cv2.imshow('erosion', erosion) # cv库腐蚀 cv2.imshow('dilate', dilate) # 膨胀 cv2.imshow('dilation', dilation) # cv库膨胀 cv2.waitKey()结果 腐蚀 膨胀
说明 注意前景与后景像素值,即是前白后黑,还是前黑后白。 使用了四层循环,时间复杂度达到 O ( n 4 ) O(n^4) O(n4) ,计算效率较慢。opencv官方库计算较快。也可以使用卷积操作编程。待探究其原因。 四层循环中,break 退出两层循环 5.其他 三维数据的腐蚀膨胀实现同二维情况下原理相同,只是核变为三维参考代码 def morphology_3d(imgMatrix, kenel, value = 1, ispadding = False): kenelz = int(kenel.shape[0]/2) kenelx = int(kenel.shape[1]/2) kenely = int(kenel.shape[2]/2) tempImg = imgMatrix.copy() for z in range(kenelz, imgMatrix.shape[0]-kenelz): for x in range(kenelx, imgMatrix.shape[1]-kenelx): for y in range(kenely, imgMatrix.shape[2]-kenely): b1 = 0 b2 = 0 for k in range(-kenelz, kenelz+1): if b1: break for i in range(-kenelx, kenelx+1): if b2: b1 = 1 break for j in range(-kenely, kenely+1): if kenel[kenelz+k, kenelx+i, kenely+j] == 1 and tempImg[z+k, x+i, y+j] == value: tempImg[z, x, y] = value b2 = 1 break return tempImg因为 O ( n 6 ) O(n^6) O(n6) 的时间复杂度,代码运行奇慢 开运算是先腐蚀后膨胀,去除孤立区,保持主体形状不变闭运算是先膨胀后腐蚀,去除孔洞,保持主体形状不变 |
 先腐蚀 A 区域,过程如下:
先腐蚀 A 区域,过程如下:







【本文地址】