| “下马”的X | 您所在的位置:网站首页 › 美国隐形无人机 › “下马”的X |
“下马”的X
|
2013年5月14日,一架X-47B从CVN-77”布什“号核动力航母上起飞 2013年夏,在弗吉尼亚州海岸附近游弋的“布什”号核动力航母上,两架X-47B无人验证机进行了弹射起飞和拦阻降落,并计划测试后退役封存。但测试的成功,重新激起了美国海军对该项目的兴趣。2013年夏末,为了支持美国海军未来“无人驾驶、航母弹射起飞空中监视与打击项目”(UCLASS),X-47B被授予更多的资金用于扩展测试验证,该项目由PMA-268(海军无人舰载机项目办公室)管理。额外的资金注入,使得PMA-268在2013年11月和2014年8月将X-47B部署到“罗斯福”号航空母舰(CVN-71)上,再次进行飞行测试。
X-47B二号机在航母升降机上展开机翼,相关测试不仅涉及起降,还包括无人机在航母甲板和机库之间的调度 飞行甲板协同测试 当X-47B无人机在弗吉尼亚附近海域的“罗斯福”号航母上,进行测试的最后十天里,开发测试团队,首次进行了载人飞机和无人驾驶飞机协同操作验证。此时的X-47B已经进行了一定程度的改进, 新的执行器可以使飞机在成功着舰后将尾钩自动抬起收回。早期的X-47B着舰尾钩在回收时,需要甲板人员辅助手动抬起。该机 还具备机翼自动折叠功能,相关程序被整合进X-47B的控制软件中,从而使无人机在着舰后视情况自主折叠机翼。
X-47B一号机在”罗斯福“号航母上,因为集成了相关软件,该机在着舰后能够自动折叠机翼 为了将无人机整合到航母舰载机飞行甲板的现有环境中,需要无人机操作员能够迅速清理飞机着陆区域,避免影响有人舰载机和其他无人机的起降。因此,相关的自动化、智能化设计必不可少,包括快速抬起回收尾钩并折叠机翼以腾出空间。PMA-268负责人称:“我们在2014年8月将X-47B部署到“罗斯福”号航母上,并对飞机进行了两次改进,使它能够以F/A-18“大黄蜂”舰载机的方式在航母上起降。我们的主要目标是验证 无人机和有人机在航母上混编调度,演示X-47和F/A-18之间的起降距离间隔比较,并证明 X-47B无人机可以在与F/A-18舰载机同样的时间里清理好着陆区域。测试结果表明,我们能够在不修改训练和作业程序的情况下,将X-47B无人机整合到航母飞行甲板现有的标准化程序中。”在测试过程中,X-47B无人机与F/A-18舰载机还首次进行了多机混编间隔起降测试。
X-47B无人机在航空母舰上成功测试拦阻降落 2014年秋,PMA-268工作团队已经成功地演示了X-47B的数字化航母飞行操作,包括起飞、着舰、保持飞行、着舰复飞以及按照指令转移飞机。美军官员说:“对于无人驾驶飞机来说,需要能够向其发送信号来完成一系列典型的舰载机程序。我们设计了 完整的数字化信息控制系统,这是将无人机舰载机引入航母操作能力的基础。我们在飞行甲板上规划了落点,通过让无人机 反复“命中”几英寸的落点,验证了其 精确着舰导航定位性能,当然能够使巨大的无人舰载飞机准确地在航行中的舰船上降落是一项了不起的成就。”测试团队还成功测试了让 X-47B昼夜飞行,以及在飞行甲板上安全滑行的能力。
在2014年8月的测试期间,X-47B在罗斯福号航空母舰上着舰 一旦X-47B着舰,它就无法再通过航路点进行导航,而且因空间有限,无人机必须具备避开飞行甲板上其他飞机和人员的能力。另外,美军还成功验证了X-47B对舰上空间的需求,比如无人机控制站、通信设备和着舰信号官平台等,通过测试证明了结构设计,以及将其整合到航母上的可行性。
航母飞行甲板指挥员发出起飞指示,X-47B无人机准备从罗斯福号航母上弹射起飞 舰载无人机空中加油 在完成第三次海上测试任务后,X-47B舰载无人机的最后一个重要目标就是自动空中加油技术验证。在这种情况下,所谓的“自动驾驶”就是指没有人通过操纵杆和节流阀控制飞机飞行,一切都依靠飞行管理计算机和传感器引导X-47B进行空中加油。
X-47B无人机(1号机)与F/A-18F舰载机,分别位于CVN-71”罗斯福“号航母1号和2号弹射器上,准备起飞 2009年,美国就制定了无人机空中加油计划,项目团队与里尔喷气公司开发了相关软件,并完成一系列改进工作。但受限于当时的条件,美军缺乏进行无人机空中加油测试的资源或机会。直到2014年9月,相关项目才获得足够的经费来完成“自主空中加油飞行测试方案”,并着手准备相关的试验计划。在测试之前,需要进一步深度开发相关的控制软件,并且对加油机进行适应性改装。
罗斯福号航母上混编起飞的X-47B和超级大黄蜂舰载机,侧面照片
库房中的X-47B二号机,可以看到加装了空中受油探头 项目管理团队认为:“美国海军使用的软管加油技术在操作时难度更大,因为空军的伸缩套管式硬管加油技术比较容易实现精确自主对接。而海军的软管加油方式在进行时,拖曳在加油机后的输油软管和锥套会不断摆动,位置变化迅速,需要更多的方法实现对接,即使对于有人驾驶的海军舰载机来说,飞行员们也会感觉到,手动控制飞机对准加油锥套是一项极富挑战性的工作”。 为此,X-47B项目团队决定采用“操作难度更大”软管加油技术进行测试,改装了受油探头。
美国空军战机通常使用”伸缩套管“式硬管加油,硬管加油细节图
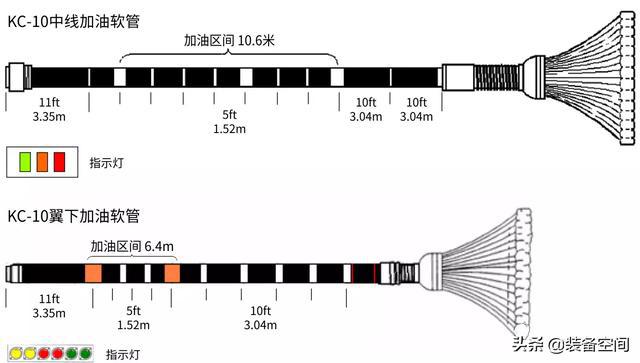
伸缩套管式硬管加油设备技术难度大,但对于受油机飞行员来说,操作难度系数低 X-47B二号机配备了空中加油探测器和红外摄像系统,能够实时提供精确导航更新,使无人飞行器的受油管准确接入移动中的加油锥套。作为X-47B光学探测系统的一部分,两台红外摄像机并排安装(冗余设计,互为备份),并配备了专用计算机来处理从红外摄像头和差分GPS传回的图像。其光学探测系统采用了一种升级的“红外焦平面阵列探测器”(IRFPA),可在复杂环境下分辨指示灯的光学信号。红外探头的前方视场为90°,能够观测到加油软管锥套上的8个指示灯(锥套外沿4个、加油口内侧4个),同时受油探管上也设置了指示灯,为差分导航系统提供位置参照,以便系统判断对接过程中的实时位置偏差。
X-47B二号机受油探头和并排安装,互为备份的红外探测器 美国海军在航空母舰上使用“差分GPS”系统,可以在10mm精度范围内分辨出飞机与甲板之间的位置偏差,用以以闭合导航回路。加油机也使用了相同的概念,在飞机上安装GPS和通信链路,以提供两架飞机之间的位置偏差。通过计算机系统计算差值,指令导航系统将飞机定位在加油机后面特定的航线上,保持非常接近的位置并做好加油准备。
KC-10加油机使用的两种锥套式软管外形尺寸 根据计划,美军使用差分GPS系统让无人机与加油机会合,然后在加油机后方进行追踪。通常从加油机后方大约1600米的地方开始,让无人机下降300米,前飞400米靠近加油机。 加油机上的操作员将X-47B控制到距离大约6米的位置,此时无人机上的红外图像与差分GPS数据融合在一起。一旦软管锥套进入传感的“视觉”范围并稳定下来,会自动切换到锥套对接模式。通过指令让无人机将受油探管保持到最佳坐标位置,以进行空中加油操作。
即使对于有人驾驶飞机来说,将受油探头对准、接入不断摇摆的软管锥套也是困难重重 2015年3月初开始进行的飞行测试,证明了X-47B无人机与加油机会合、保持位置并安全接近的能力。2015年4月,又进行的一系列相关飞行,演示了X-47B二号机与加油锥套对接,并成功进行燃油输送。X-47B验证的最初目标是让受油探头在软管锥套内停留5分钟,并输送燃料,计划重复测试三次。但测试团队最终完成了四次对接,并成功证明了使用无人飞行器进行自动空中加油的可靠性。4月份的一系列飞行测试完成了最初的验证计划目标,但2013年X-47B项目收到的额外资金也已用尽。
X-47B无人机从航母起飞,离开飞行甲板的瞬间 在航母上运行X-47B无人机的所有经验教和数据,包括甲板操作和空中加油技术,都将被用于UCLASS项目的性能规范、操作概念。PMA-268办公室发言人称“对于我们来说,这是一个令人兴奋的时刻,也是一个过渡点。X-47B表现的非常完美,使我们能够将很多技术、经验和信息转移到项目的下一阶段。当UCLASS项目审查完成时,我们应该能够拥有一套协调一致的要求和资金继续前进,以使我们能够拥有舰载无人作战飞机。”然而,当时他们没有想到的是,很快UCLASS项目就已经没有了未来,而诺斯罗普·格鲁门在X-47B验证机上付出的一切,都为后来的波音MQ-25A“黄貂鱼”无人加油机做了嫁衣。
X-47B二号机与欧米伽航空提供的波音707加油机在切萨皮克湾上空成功完成空中加油测试 UCLASS计划 UCLASS“航母舰载无人机监视和打击系统”项目,当时还没有成为一项竞争性采购计划,但是已经有四家供应商对项目办公室的计划草案进行了初步设计审查,并且都开始积极进行他们各自提案的详细设计工作,以满足美国海军UCLASS要求。 美国海军是UCLASS计划的主要系统集成商。它拥有整个项目的体系架构、定义系统接口,并在整个项目中利用了大量已有程序和记录数据,比如F-35C“闪电II”使用的联合精确进近和着陆系统程序。 美国海军规定UCLASS项目架构应该包括与X-47B验证机平台不同的着陆系统、控制站和网络。而诺斯罗普·格鲁门公司在X-47B项目上获得的信息和数据,必须与参与UCLASS项目的其他供应商共享。
X-47B成功降落在航空母舰上,尾钩挂上拦阻索瞬间 美军官员称,UCLASS是一个系统,而不仅仅是一架无人机,它包括无人机本身、机载设备、武器弹药、子系统集成要求以及“视线和视线外”的连接控制站,所需要系统组件都需要继续深入开发。该无人机系统需要具备ISR(情报、监视、侦查)、瞄准和打击能力,并具备全天候作战能力。舰载无人机项目办公室统一了联合需求采购流程,将UCLASS所需的全部功能进行规范。2015年夏,美国国防部长办公室审查了UCLASS的项目要求,以确保所有规范的正确性。
MQ-8”火力侦察兵“无人机降落在驱逐舰甲板上,虽然是无人直升机,但也为X-47B提供了许多舰上操作经验 同时,项目管理部门正在考虑利用近年产生的新技术,尤其是在航空制造和材料方面的进步,并期望这些新技术可以支撑UCLASS项目,在生存能力和耐久性方面具备更先进的设计。ISR、瞄准和打击能力之间的混合需求,将推动飞行器朝更高的飞行速度和耐力水平发展,而无人机不受飞行员生理状况限制,将成为它的主要优势。 PMA-268办公室、美国海军和联邦航空管理局(FAA)一起开发UCLASS无人机的作战概念,以满足其与有人飞机一起使用空域时的严格要求。其实,这也是美国海军及项目管理团队,向联邦航空局证明“舰载无人机安全运行的可靠性和完整性问题”。从UCLASS项目本身来看,他们可以借鉴MQ-8“火力侦察兵”和MQ-4C“特里同”无人机的经验,利用这两个项目管理团队开创的空域协调和重复安全运行办法。
X-47B舰载无人验证机虽已远去,但其代表的发展方向和所验证的技术,值得注意和深思 总体而言,X-47B无人机绝非一无是处,不要忘记其本身就是一种技术验证机,美国为其投入的资金和精力只是为了获取“舰载无人机”的经验、数据和技术储备,无论是后来的MQ-25A“黄貂鱼”舰载无人加油机,还是未来更加先进的舰载无人飞行器,都将建立在X-47B的验证基础上,毕竟该机实现了舰载无人机弹射起飞、拦阻降落、空中自主加油、甲板调度等一系列最基础、最重要的技术突破和数据采集。返回搜狐,查看更多 |


















【本文地址】