| 图文并茂详细教程之– 用pixhawk飞控组装一台F450四轴无人机(中) | 您所在的位置:网站首页 › 组装无人机需要用到哪些工具 › 图文并茂详细教程之– 用pixhawk飞控组装一台F450四轴无人机(中) |
图文并茂详细教程之– 用pixhawk飞控组装一台F450四轴无人机(中)
|
摘自:https://mp.weixin.qq.com/s/HY7XLzUH1odve4d8paknpg 图文并茂详细教程之-- 用pixhawk飞控组装一台F450四轴无人机(中)CJKK 苍穹四轴DIY 2019-11-15 飞控的调试 上一篇教程详细介绍了F450硬件的组装过程,接下来重点介绍飞控的调试部分。因为F450机型和S500机型配置上基本相同,调试部分相同的地方就引用S500机型的说明和图片。不同的地方再加以补充。 开源飞控因为其自身硬件的复杂性,固件的多样化,并不是一下就能搞懂的。需要逐步学习,才能理解其中的使用方法。所以在进行飞控的调试前,请大家先仔细看下图了解飞控的接口。在不熟悉的情况下,千万不要想当然的接线。错误的接线会导致飞控工作不正常甚至烧毁。
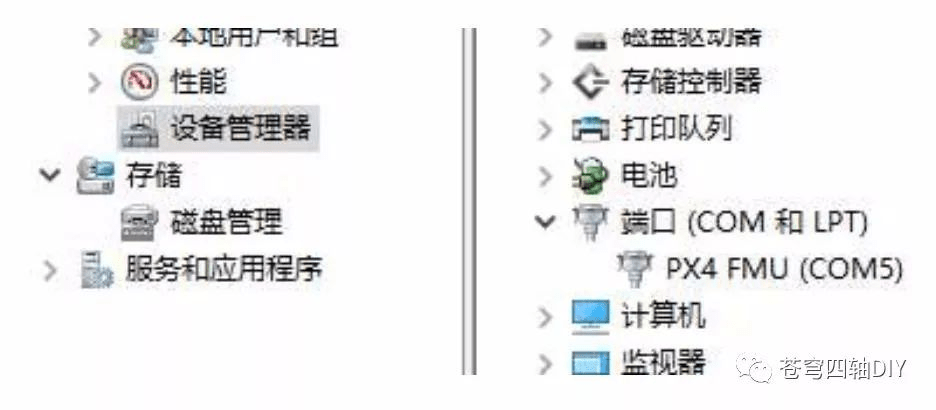
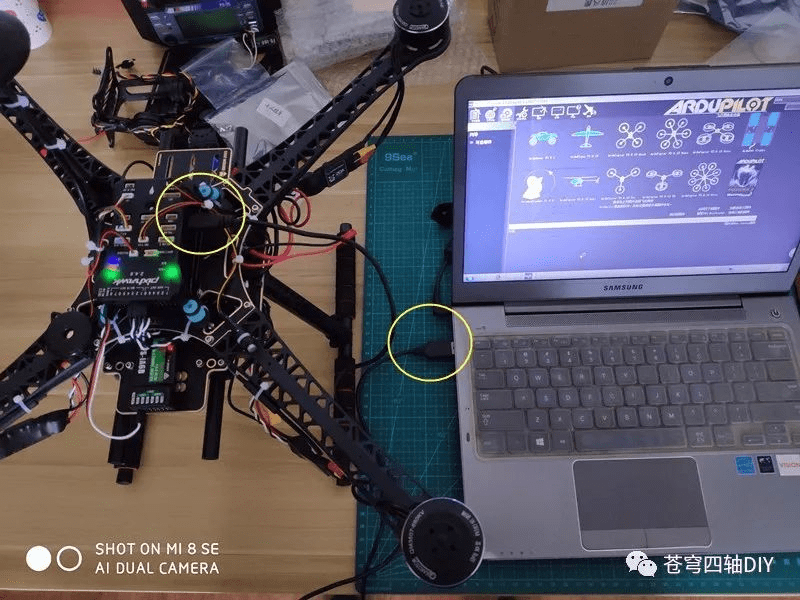
调试前的准备: 1.飞控连接电脑 飞控连接电脑需要一根安卓手机数据线(需要自备)。电脑建议使用WIN10系统。当飞控连接电脑后,会有声音提示,并且右下角会有提示发现新硬件,系统会自动安装驱动。特别提醒:有些精简版 GHOST 系统和 64 位 WIN7 系统因缺少相关文件会提示驱动不成功,请下载 驱动精灵,从驱动精灵来安装驱动程序。驱动是否成功安装的标志就是在设备管理器中正确识别了标识为 PX4 FMU 的端口号。 如果飞控连接电脑没有反应,也有可能是数据线的问题。有些数据线只能供电,没有数据传输功能,请换一根数据线再连接。 或则点击链接下载PIX驱动安装: https://pan.baidu.com/s/1a5A8FTeuwXpjmLy_penLXA 提取码:t4e9
2.认识 Misson Planner 的界面 安装完 Mission Planner 和驱动后,现在可以开始启动 Misson Planner 主程序了 ; 主界面左上方为八个主菜单按钮: 飞行数据:实时显示飞行姿态与数据; 飞行计划:是任务规划菜单; 初始设置:用于固件的安装与升级以及一些基本设置; 配置调试:包含了详尽的 PID 调节,参数调整等菜单; 模拟:是给 PIX 刷入特定的模拟器固件后,将 PIX 作为一个模拟器在电脑 上模拟飞行使用; 终端:是一个类似 DOS 环境的命令行调试窗口,功能非常强大。
敲黑板!!!重点来了:飞控的调试
飞控与电脑的连接 第一步:固件的刷写 PIX拿到手后首先要做的就是给它刷入你自己需要的固件,虽然卖家在销售前可能会帮你刷入固件,但是未必是符合你要求的固件,所以学会刷新 PIX 的固件是你的必修课之一。 固件安装前请先连接 PIX 的 USB 线到电脑,确保电脑已经识别到 PIX 的 COM 口号后,打开 Mission Planner(以下简称 MP),开启后会有提示是否更新,请点击NO(我们使用的是1.3.62稳定版,不用升级。)
1.选端口和波特率 在 MP 主界面的右上方端口选择下拉框那里选择对应的 COM 口,一般正确识别的 COM 口都有 PX4 FMU 标识,直接选择带这个标识的 COM 口,然后波特率选择 115200,注意:请不要点击 connect 连接按钮,固件安装过程中程序会自行连接。如果你之前已经连接了 PIX,那么请点击 Disconnect 断开连接,否则固件安装过程中弹出错误提示。 另外请注意:请不要用无线数传安装固件,虽然无线数传跟 USB 有着同样的通信功能,但它缺少 reset 信号,无法在刷固件的过程中给 PIX 复位,会导致安装失败。 2.点击 初始设置,安装固件,点击四轴图标,下载最新版四轴固件 注意:电脑请连接网络,点击 安装固件 后,地面站软件会自动连接官方服务器查询最新固件。没有网络就无法下载最新固件。(固件就相当于写入飞控的程序) 因向导模式功能不完善,请不要使用向导升级安装固件,出错概率比较大。 注:官方服务器有时因为网络原因连接不上无法下载固件,可以点击下面的链接,手动下载我们提供的固件,然后点击 加载自定义固件 ,选择下载好的固件上传到飞控,也是一样的。 四轴固件下载链接: https://pan.baidu.com/s/1KJ3-o1mBvgDVc3xE3R5njQ 提取码:9r7w
点击 安装固件 后,窗口右侧会自动从网络下载最新的固件并以图形化显示固件名称以及固件对应的飞机模式,你只需要在对应你飞机模式的图片上点击,MP 就会自动从网络上下载该固件。点击四轴图标后,会弹出以下对话框,询问是否升级到最新版本,点YES
在连接过程中会弹出提示是否下载ChibiOS,请选择NO
地面站就会自动从官网下载最新版固件,期间会弹出下面的提示,请先拔下 USB 线,点击 OK,再马上插上 USB 线,然后自动完成连接 PIX— —写入程序——校验程序——断开连接等一系列动作,完全无需人工干预。
固件安装提示 Done 成功后,飞控蜂蜜器会发出一连串音乐,待音乐停止,点击确定。固件刷写就结束了。点击右上角的 connect 连接按钮连接 PIX,就能查看 PIX 实时运行姿态与数据了。 第二步:设置机架类型 飞控连接地面站以后,初始设置 页面会多出 必要硬件,选择 机架类型 ,然后分别点击下图所示的3、4
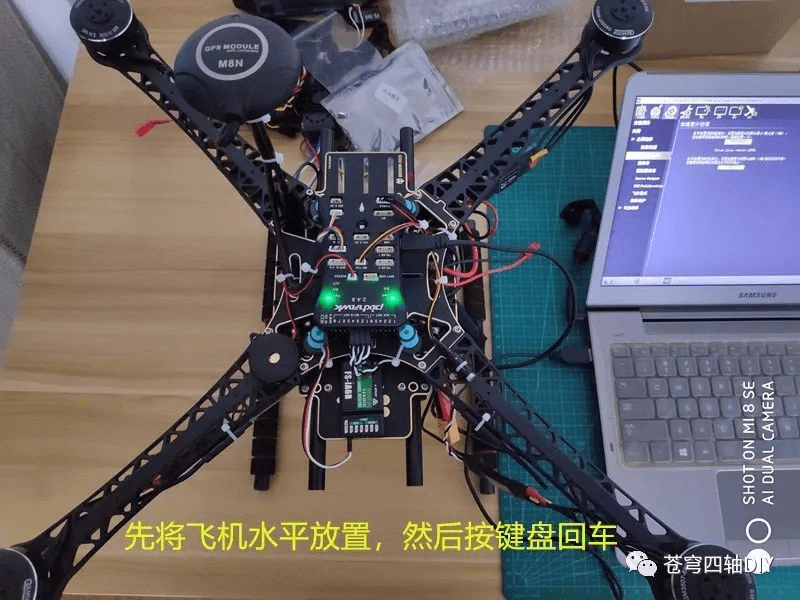
注意:新版固件如果不设置机架类型,就会警报:check firmware or FRAME_CLASS 第三步:加速度校准 初始设置 页面,点 加速度计校准 做加速度计校准前,将飞机水平放置,校准过程会执行 6个动作,每次按电脑回车键或则空格键确认,点击 校准加速度计,如下所示:
1. Place vehicle level and press any key(水平放置)完成后回车
2. Place vehicle on its LEFT side and press any key(向左边放置)完成后回车
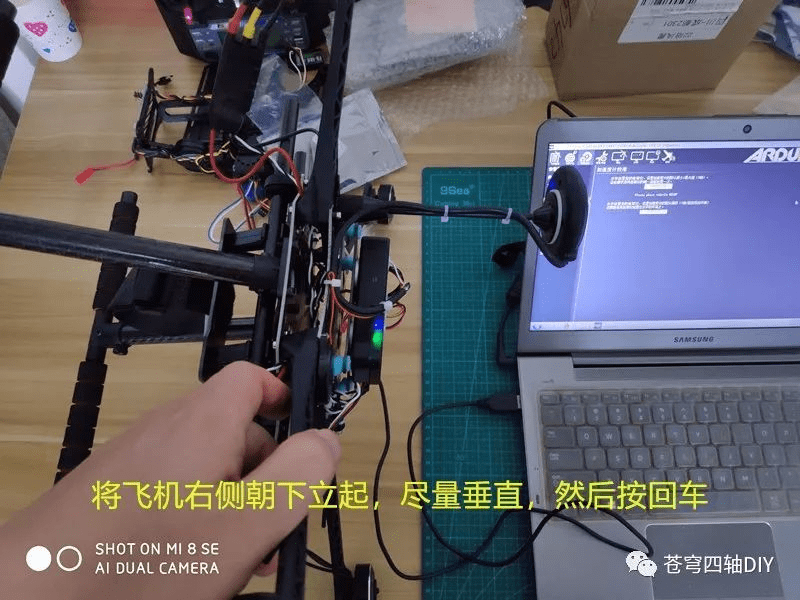
3. Place vehicle on its RIGHT side and press any key(向右边放置)完成后回车
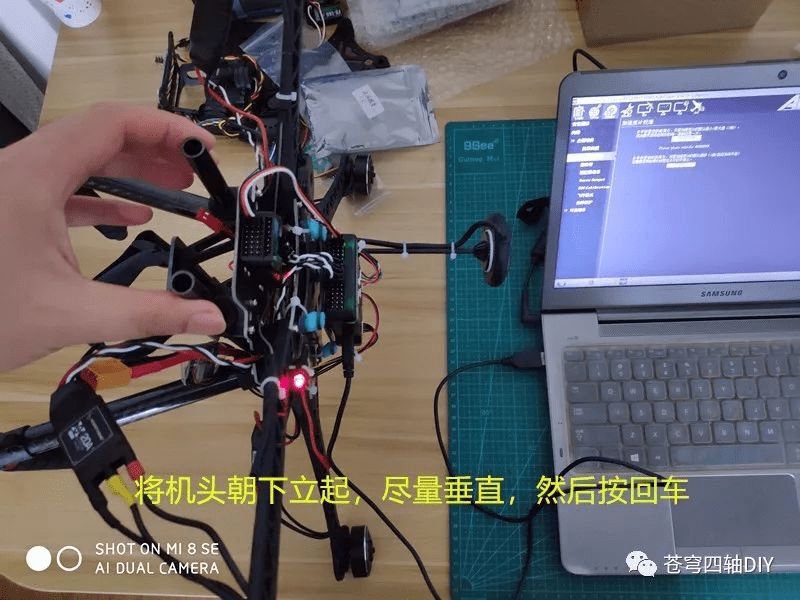
4. Place vehicle nose DOWN and press any key(向下放置)完成后回车
5. Place vehicle nose UP and press any key(向上放置)完成后回车
6. Place vehicle on its BACK and press any key(反过来放置)完成后回车
校准完成,会显示calibration Successful。 如果校准失败,请重新校准。 校准完加速度计,请断开连接,再断开USB,重新连接。 第四步:指南针校准 点击初始设置下的必要硬件菜单,请确保GPS接线正确。 选择指南针菜单,按下图勾选对应的设置以后点击开始,如下所示:
飞控里面和GPS模块里分别各有一个指南针。 GPS里集成的指南针一般叫做外置罗盘是1#,飞控里面的指南针叫内置罗盘是2#。 注意:校准罗盘请远离金属构件、喇叭等强磁性东西。 校准时要求将飞机每个面都朝上旋转1~2圈(正反均可)。 1.水平放置旋转1~2周 旋转的时候注意USB线打结,可顺时针旋转一周,逆时针旋转一周。 或则用数传模块代替USB线,就能避免USB线缠绕。
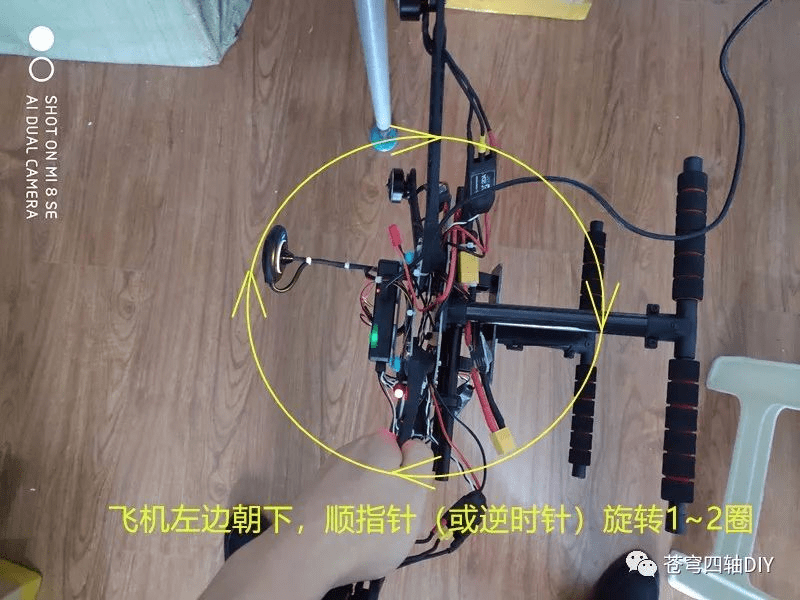
2.左侧朝下旋转1~2周
3.右侧朝下旋转1~2周
4.机头朝下旋转1~2周
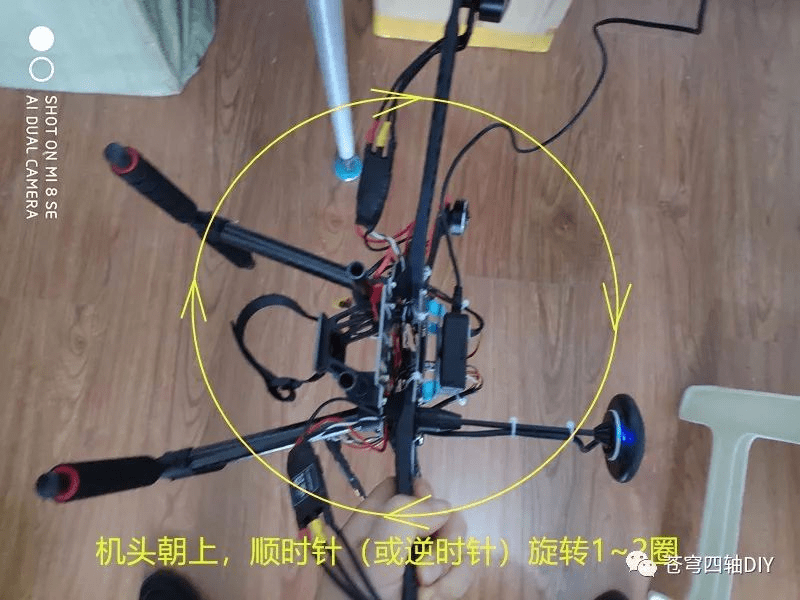
5.机头朝上旋转1~2周
6.底朝上旋转1~2周
校准过程会伴随着2个进度条的行进,当进度条行进完毕,校准就完成了。如果不能校准,请断开连接检查接线是否正确,重新执行校准。 校准完成后要求重启飞控。 重新连接USB后,再连接地面站,指南针页面就能看到指南针的数据。数值小于 400 为绿色代表数值正常可用,当大于 400 黄色代表警告,当超过 600为红色完全不可用。大于400数值需要重新校准。 第五步:遥控设置及校准 乐迪AT9S遥控器与开源飞控pixhawk可以很好兼容,价格也不贵。它的特点是可以在遥控器上实时看到飞控的飞行数据,对飞行来说是很方便的。下面就重点讲解AT9S遥控器的设置和校准。 遥控器设置
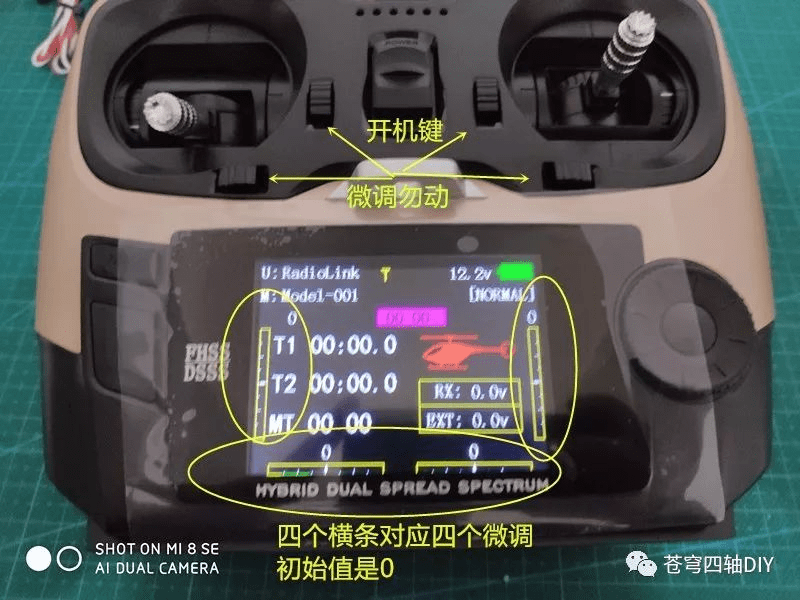
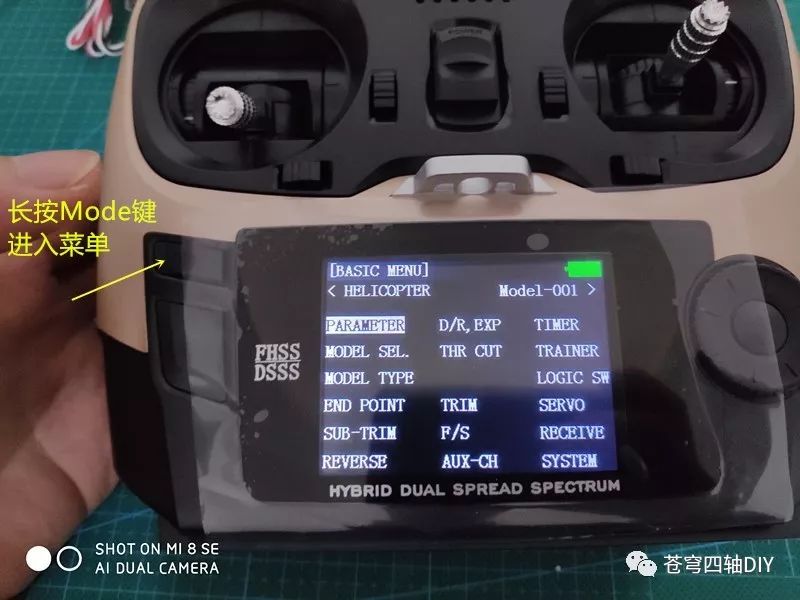
遥控器安装好电池,开机后默认是直升机模式,英文界面 1.系统设置
长按Mode键,进入设置菜单。选择 PARAMETER,按右边圆盘确认进入。
如图所示,第一项为语言设置。再按一下右边圆盘,English开始闪烁,然后旋转圆盘调至 简体,再按一下圆盘就设置好了中文界面。
如上图所示,继续旋转右边圆盘,将 发射报警 设置成10.5V,这是遥控器电池低压报警值。将 动力报警 设置成 10.6V(对于3S电池而言,如果是4S电池,则设置成14.4V),这是飞行器电压低压报警值。以后当飞行器电量低于设定值,遥控器会震动报警。 摇杆模式和发射模式不能改。用户名字可以自己改。 2.机型设置
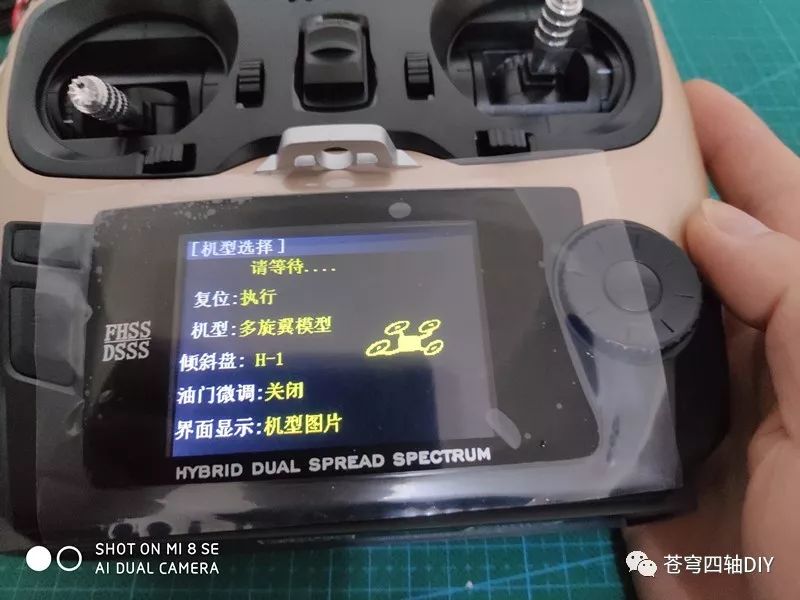
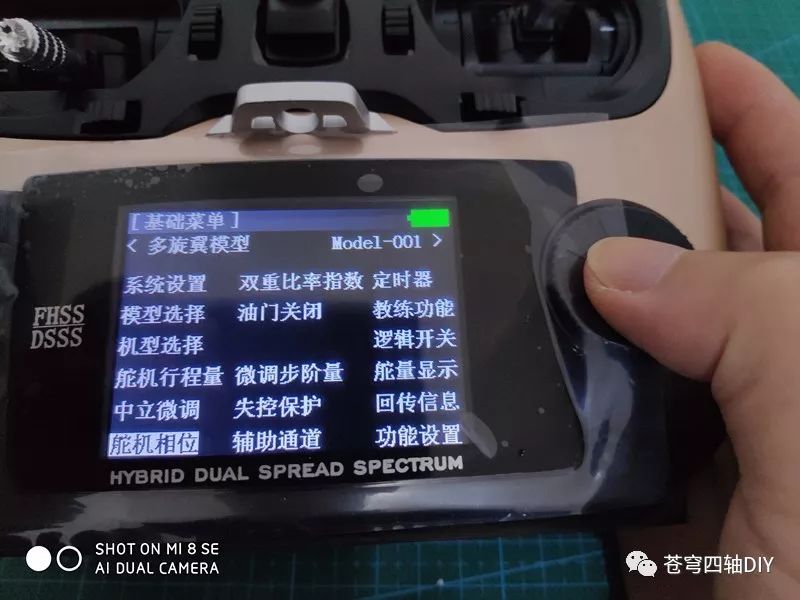
系统设置完成后,按左下角 END 键,回到菜单。旋转圆盘,选择 机型选择。
进入后,将 直升机模型 设置成 多旋翼模型 ,长按圆盘确认。
3.相位设置
进入 舵机相位 菜单
将油门相位设置成 反相 4.辅助通道设置
进入 辅助通道菜单,然后选择 五通 ,进入
将5通道,三段开关分配给SWE,二段开关分配给SWD,其他设置依照上图分别设置即可。注意:模式名称与百分比参数不能设置错误,否则和后面设置飞行模式对应不上。 5通道设置的目的是控制飞行器飞行模式。它是由一个3段开关和一个2段开关组合搭配形成。
当 开关D在上档,开关E 3个档位分别对应:定高、悬停、返航 当 开关D在下档,开关E 3个档位分别对应:降落、绕圈、自稳 具体在飞行中如何使用,请参考室外飞行操作视频。 5通道设置好以后,再根据下图分别设置好6~10通道。
遥控器背后两个拨杆分别对应VRC和VRD两个开关。 5.接收机模式设置 AT9S接收机出厂默认是PWM模式输出,需要将它设置成SBUS模式输出,飞控才能识别到遥控器信号。给飞机接上电池,这时候会看到接收机亮红灯,表示是PWM信号输出。
找一个小螺丝刀,连续按2下接收机侧面的小按钮,LED变成蓝色。表示接收机是SBUS信号输出。
设置好以后,可以将接收机,回传模块绑扎好。
绑扎好的样子。 地面站设置 连接飞控和电脑, 运行 MP软件。选择好波特率115200与端口后点击 connect 连接 PIX,接着点击初始设置——必要硬件——遥控器校准——点击窗口右边的校准遥控按钮,如下所示:
注意:如果通道里没有绿色显示,说明接收机信号没有传输到飞控,请检查飞控与接收机的接线,或则检查接收机是否是蓝灯SBUS模式输出。 点击校准遥控后会依次弹出两个提醒:分别是确认你遥控发射端已经打开 and 接收机已经连接飞控。 然后点击 OK 开始。将遥控器左右两边摇杆上下左右均推到最大,使每个通道的红色提示条移动到上下限的位置。并且四个通道的最大值和最小值数据都应该差不多。
现在使用最多的是左手油门(也叫美国手:油门摇杆在左边,不能自动回中),摇杆对应通道如下: 通道 1:低 = roll 向左,高 = roll 向右。(横滚:控制飞机左右运动) 通道 2:低 =pitch 向前,高=pitch 向后。(俯仰:控制飞机前后运动) 通道 3:低 =throttl减(关),高=throttl加。(油门:控制飞机动力及高度) 通道 4:低 = yaw 向左,高 = yaw 向右 (航向:控制飞机机头方向) 不管是哪个品牌的遥控器,1~4通道都是分配的摇杆的,是固定不变的。 拨动E和D开关,查看对应5通道是否动作; 拨动VRC开关,查看对应的6通道是否动作; 拨动A开关,查看对应7通道是否动作; 拨动B开关,查看对应8通道是否动作; 拨动H开关,查看对应9通道是否动作; 摇杆行程全部打满,通道动作没有问题,就可以点击 完成时点击 按钮。会弹出如下对话框:
点击OK,遥控器校准完成 注意:一定要等数据窗口弹出后点OK,才能保存数据。遥控器微调请勿调整。 第六步:飞行模式设置 新手对飞行模式是没有体会和认识的。这也是导致刚开始飞不好的原因! 新手往往认为,只要飞机组装调试好了,推油门就应该平稳起来,自己悬停在空中。其实不是这样的。飞机的飞行姿态,一方面是遥控器摇杆人为控制,比如前后,左右运动。一方面,就是靠选定的飞行模式控制,保持空中定高,或则定点。切换不同的飞行模式,飞行器也就执行不同的预设动作。新手还是需要多加练习,才能真正体会飞行模式的作用。 Pixhawk有多种可飞行模式可以选择,但常用的一般就六种,加上 CH7,CH8 的辅助,最多也就八种。一般来讲,要保证熟练了一种飞行模式再进行下一个练习。 点击初始设置->必要硬件->飞行模式选择,就会弹出如下的飞行模式配置界面,如下所示: 为保险起见,新手请按照我们的设置进行,以后熟悉后再根据自己的习惯来设置。(飞行模式的具体介绍,请参考公众号相关文章)
遥控器开关位置:开关组合:E=上 D=上 此时地面站 飞行模式1 会绿色高亮显示,我们将飞行模式1设置成:ALTHOLD(定高) 遥控器开关位置:开关组合:E=中 D=上 此时地面站 飞行模式2 会绿色高亮显示,我们将飞行模式2设置成:LOITER(留待=悬停=定点) 遥控器开关位置:开关组合:E=下 D=上 此时地面站 飞行模式3 会绿色高亮显示,我们将飞行模式3设置成:RTL(返航) 遥控器开关位置:开关组合:E=上 SWD=下 此时地面站 飞行模式4 会绿色高亮显示,我们将飞行模式4设置成:LAND(降落) 遥控器开关位置:开关组合:E=中 SWD=下 此时地面站 飞行模式5 会绿色高亮显示,我们将飞行模式5设置成:CIRCLE(绕圈) 遥控器开关位置:开关组合:E=下 SWD=下 此时地面站 飞行模式6 会绿色高亮显示,我们将飞行模式6设置成:Stabilite(自稳) 简单模式和超级简单模式先不勾选,勾选即表示启用。 开关组合要牢记,飞行时很重要。必要的话可以在遥控器上贴上标签注明避免操作失误。 注意:地面站里飞行模式与前面遥控器5通道模式名称是一一对应的。 设置SWA切换简单模式 地面站软件点击调试配置页面->扩展调参 将CH7设置为SIMPLE MODE 简单模式,如下所示:
简单模式就是无头模式。 以后再飞行时,通过A开关,就可以在有头模式和无头模式之间进行切换。 其他PID参数请不要设置,默认就好。 第七步 飞控的解锁与上锁 做完上面的六步,长按安全开关,安全开关LED灯长亮,飞控LED变成蓝色闪烁状态,表示飞控就可以解锁了。 注意:如果飞控还是闪黄灯,表示还有未解除的警报,请查看首页水平线大红色字体的提示。只有在警报解除完以后,才能解锁。 很多新手不明白解锁是什么意思,认为插上电池推油门飞机就应该起飞。对于玩具飞机而言,因为动力小,桨叶软,基本没有杀伤力,这样做可能并没有危险。 但是对于无人机使用的无刷电机而言,动力比较大,像我们这采用的2812电机,使用的是10寸桨(有25厘米左右)。如果插上电池,不需要解锁,在没有注意的情况下推动了油门摇杆,桨叶产生的杀伤力是很大的,触及皮肤很容易就被割破。更别说像电力架线,植保机这种大动力机型。 所以,为了安全起见,pixhawk飞控有2重安全保护:安全开关解锁和遥控器解锁。只有确认这两个解锁方式都正常,飞控才能解锁。并且解锁后,电机就会旋转,所以一再强调调试阶段不能安装桨叶! 解锁方法: 1. 将飞行模式开关切换到自稳模式,开关组合:E=下 D=下 2. 首先长按安全开关,直到灯停止闪烁变为常亮 3. 遥控器解锁,PIX 的解锁动作是以检测到第三通道最低值+第四通道最高值为标准的,即油门最低,方向最右。请保持油门最低,方向最大的动作 3秒左右。
当 PIX 解锁成功,LED 灯长亮,蜂鸣器会长响一声( 观察地面站, 故障保护页面,3通道值最小(在1000左右),4通道值最大(在2000左右),DISARMED 会变成 ARMED,表示解锁成功。
解锁后推油门,电机就会旋转。并且右边电机输出会随着油门的增加而增大。 需要注意的是:PIX 解锁以后,15 秒内没有任何操作,它会自动上锁。 手动上锁方法:油门最低,方向最左(PWM 最低)。 上锁方法: 有2种上锁方法: 1.油门摇杆处于最低位15秒没有任何动作,飞控自动上锁; 2.油门摇杆往左下角一直按住3秒左右上锁。
电机旋转方向调整 解锁后电机可以转动,我们就要进行电机旋转方向的调整(前面遗留未做)。如果电机旋转方向与示意图不同,就交换电机与电调的任意两根接线。这样电机的旋转方向就改变了。电机旋转方向一定要正确,否则飞机无法起飞。
电机旋转方向调整好,可以用尼龙扎带将电调绑扎在机臂上。做到整洁美观。减少震动。 因篇幅较长,失控保护,电流计等设置,我们在后一篇教程详细介绍。 请大家继续关注! |










































【本文地址】