| 【矩阵论】范数和矩阵函数(1) | 您所在的位置:网站首页 › 算子范数与矩阵范数的区别 › 【矩阵论】范数和矩阵函数(1) |
【矩阵论】范数和矩阵函数(1)
|
范数及矩阵函数之范数的概念
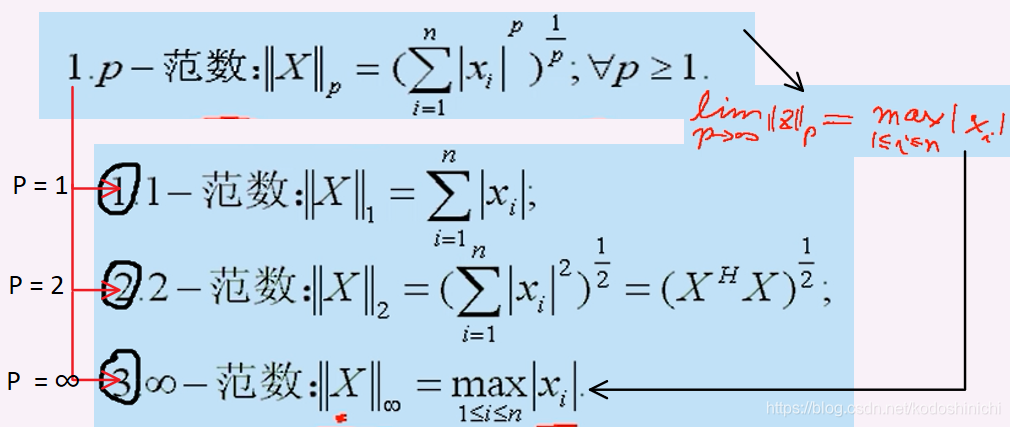
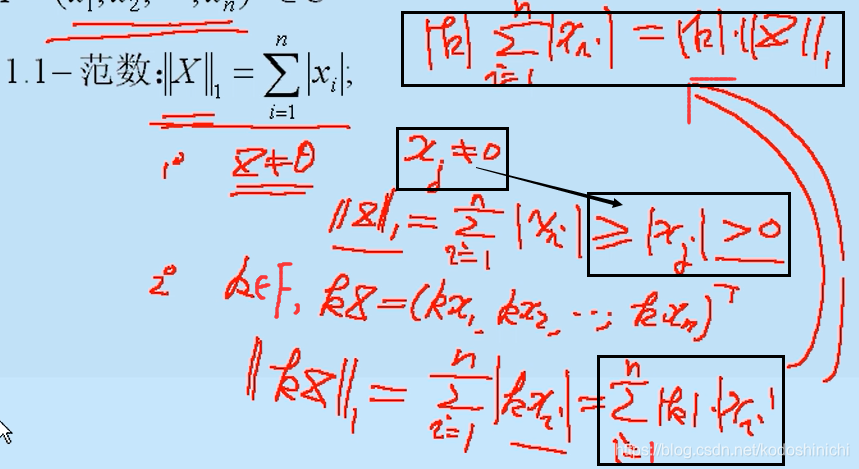
首先将本章的内容做以下大致的梳理: (1)范数——向量空间上的满足某些性质的实值函数 性质1称为范数的正定性(恒正性) 性质2称为范数的齐次性,其中因为k∈F,F可能是复数域,所以k值要取模值 性质3称为范数的三角不等式 (2)赋范线性空间 把定义了范数的线性空间称为是赋范线性空间 2. 常见的范数与赋范线性空间举例(1)内积空间中的长度即是范数的一种 【回顾】内积空间就是定义了内积的线性空间:若F∈R,则为欧几里得空间;若F∈C,则为酉空间。 因为内积空间的长度是最常见也是很重要的一种范数,所以这一章在表示“范数”时,我们都使用记号||·|| 注意:在谈论范数时,||·||并不是唯一指代向量长度。 (2)Cn中范数举例(p范数与范数的变换) 假设有任意向量X = (x1,x2,…,xn)T∈Cn ①P范数族 有关p范数是否满足范数定义的三性质,以下通过1-范数来举例说明: 【注】1-范数的“正定性”、“齐次性”和“三角不等式”性质的满足本质上是模运算的相应性质的满足。 ②范数的变换 对于Cn空间上已知的范数定义,通过一个可逆矩阵A,即可相应得到另一种范数定义。 简要证明如下: (3)任意线性空间中的范数定义
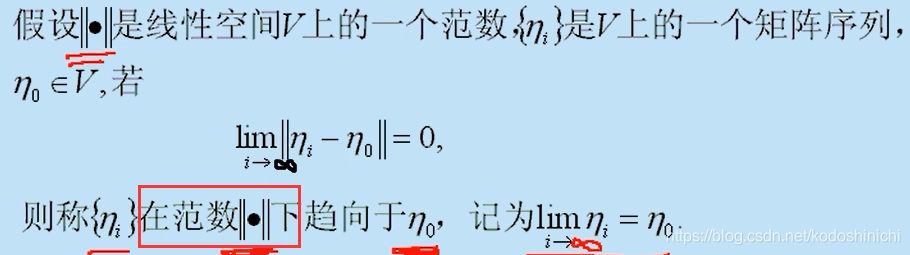
换言之,就是对于任意给定的一个线性空间V(F∈C); 找到该空间V上的一组基,V上的任意向量α在该组基上的坐标相应为X; 则V上的任意向量α的范数||α||V就可以转换成其坐标X向量(X∈Cn)在Cn空间中的范数||X||C^n^。 p.s. 而前面我们讨论了很多Cn空间行得通的范数定义,根据需要选用即可。 二. 范数与极限此部分讲述定义“范数”概念的必要性。 定义范数是为了定义向量序列与向量的极限。 1. 矩阵序列与收敛
p.s. 矩阵序列的收敛是与选用的范数定义相关的。 2. 范数的可比较性一言以蔽之,如果两个范数是可比较的,那么在这两个范数下所描述的矩阵序列的收敛性是等价的。 看回矩阵序列收敛的定义处,如果选用两个不同的范数,那么是否会存在相同的矩阵序列收敛于不同的值的情况? ——基于此,我们提出了范数的可比较性。 (1)定义
Tip:既然“可比较”的定义中给出了不等式关系,证明时主要利用极限的夹逼准则。 若||ηi-η0||→0,则||ηi-η0||'→0 根据可比较的定义: ||ηi-η0||'≤(1/k1)||ηi-η0||→0; ||ηi-η0||'≥(1/k2)||ηi-η0||→0; 根据夹逼准则,有||ηi-η0||'→0。 若||ηi-η0||'→0,则||ηi-η0||→0 思路同上: ||ηi-η0||≤k2||ηi-η0||'→0; ||ηi-η0||≥k1||ηi-η0||'→0; 根据夹逼准则,有||ηi-η0||→0 (3)定理 有限维线性空间V上任意两个范数均是可比较的。 三. 矩阵范数之前我们讨论的都是一般的线性空间的范数定义,以下我们讨论一个较为特殊的线性空间——矩阵空间上的范数定义。 1. 常见的矩阵范数的定义(1)矩阵p-范数 如果把矩阵进行行分块或者列分块,每一个分块元素都可以套用之前Cn空间中定义的范数,从而就可以引出矩阵范数的相关定义。
这其中对矩阵2-范数要格外引起注意: 矩阵2-范数(Frobenius范数)对于酉变换保持不变性。 (2)算子范数 如果以线性变换的角度来看待一个矩阵,那么Amxn∈Cmxn这个矩阵可以看做把一个属于Cm空间中的向量X,映射成属于Cn空间中的向量AX。 基于这个线性映射的计算过程,我们同样也想要定义相对应的范数。
虽然此处不会深究讨论,但读者需要培养一个思维,当我们定义了上述的范数形式后,想要认可其确实可以作为一个范数,还需要思考以下问题: ||A||该范数是否有意义?||A||该范数是否满足范数公理? 算子1范数,算子2范数和算子3范数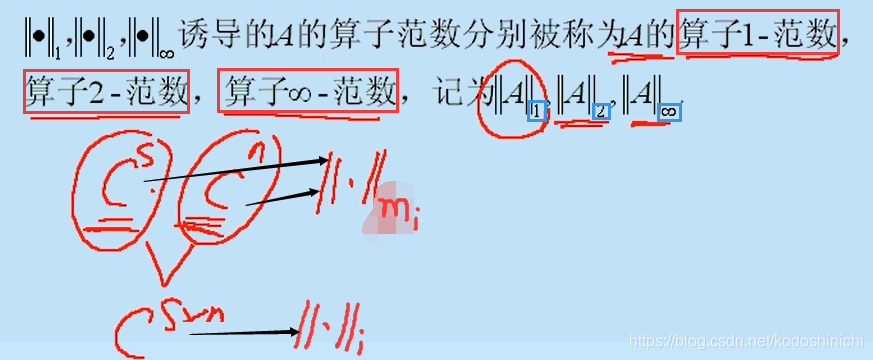
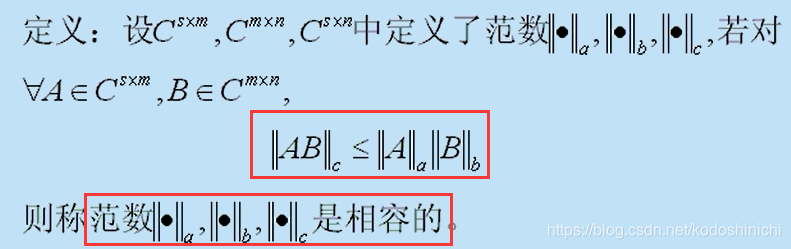
当原空间和变换空间分别取||·||mi(矩阵某范数),那么由此诱导出来的算子范数就是||·||i(相应的算子某范数)。 p.s. 这里一定要注意下标的表示方式,不要弄混了。 2. 矩阵范数的相容性对于矩阵来说,其不仅有数乘、加法运算,还具有乘法运算。 数乘和加法运算针对于范数来说,根据范数定义中的齐性和三角不等式得到了规范; 但是乘法运算相应于范数还未有规范,至此我们提出“相容性”的概念。 (1)相容性的定义 证明矩阵无穷大范数不相容,只需要给出反例即可 如上图考虑一个2阶全1方阵,其自身的无穷大范数为1;其2阶幂乘的结果是2阶的全2方阵,相应的无穷大范数为2; 显然不等式2≤1x1是不满足的。 故,不相容。 关于矩阵1范数与2范数的相容性,视频中未给出证明,读者可以自行尝试。 证明的思路可以借鉴下方链接中的证明题,利用范数的定义、性质进行不等式的放缩即可。 https://www.bilibili.com/read/cv4152269 (3)定理2——算子范数一定是相容的 也就意味着如果对于三个线性空间Cs,Cm和Cn,分别定义了其空间中的三个范数||·||Vs,||·||Vm和||·||Vn; 那么这三个范数又分别可以诱导出三个算子范数为||·||sxm,||·||sxn和||·||mxn。 “算子范数一定是相容的”,也就是说||·||sxm,||·||sxn和||·||mxn这三个范数是一定满足相容性的定义的。 (4)定理3——算子范数的求解 算子1范数就是最大的模长列和算子2范数就是矩阵AHA的谱半径算子无穷大范数就是最大的模长行和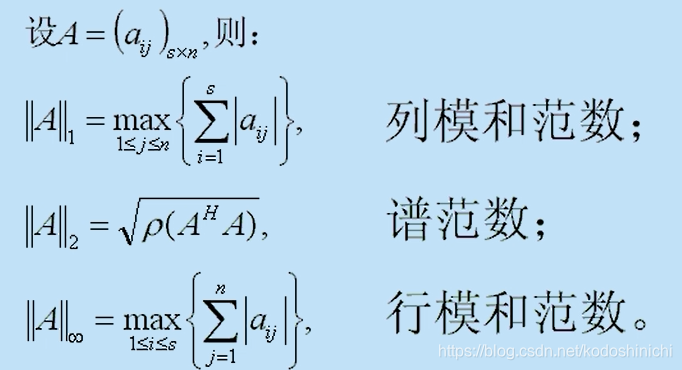
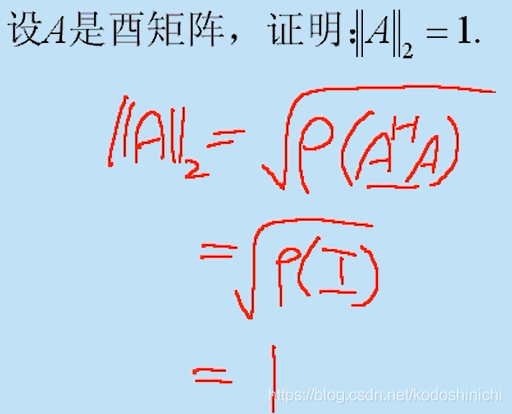
以上三种算子范数中,谱范数是最重要的。 到此,有两个我们需要重点关注的矩阵范数,其一是矩阵2范数(Frobenuis范数),其二就是算子2范数(谱范数)。 【例】矩阵范数的求解 - 1 按照范数的定义相应代入计算即可。 拓展询问一下,若要求A(是一个酉矩阵)的矩阵2范数,那么根据定义—— ||A||m2 = (tr(AHA))1/2 = (tr(I))1/2 = (n)1/2 n阶酉矩阵的矩阵2范数为n1/2n阶酉矩阵的算子2范数为1【例】矩阵范数的求解 - 2  证明思路比较清晰,这里不再赘述,将例题中的结论提炼出来。 对于一个分块对角矩阵其矩阵2范数就是各分块矩阵2范数的平方和再开方其算子2范数就是各分块矩阵算子2范数中取最大值 证明思路比较清晰,这里不再赘述,将例题中的结论提炼出来。 对于一个分块对角矩阵其矩阵2范数就是各分块矩阵2范数的平方和再开方其算子2范数就是各分块矩阵算子2范数中取最大值
记忆技巧: 矩阵2范数↔迹;算子2范数↔谱半径↔取最值 在分块对角中迹是相加的关系; 在分块对角中谱半径是再取最值的关系。 |
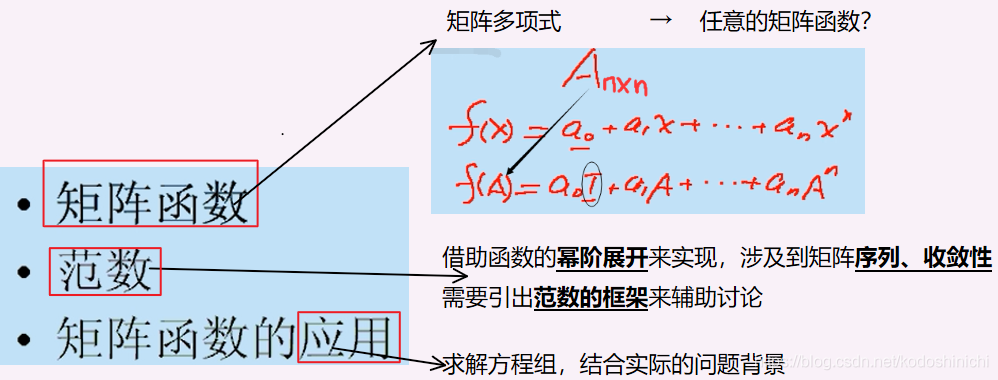 我们通过范数的概念来解决矩阵函数的问题,利用矩阵的函数可以解决很多实际问题。
我们通过范数的概念来解决矩阵函数的问题,利用矩阵的函数可以解决很多实际问题。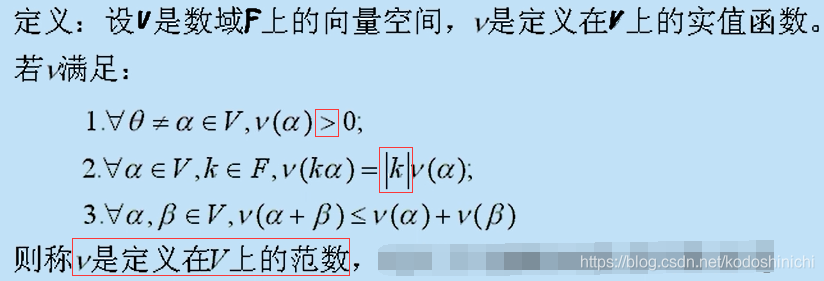

 上图中用黑框标注的地方就是证明的关键位。
上图中用黑框标注的地方就是证明的关键位。
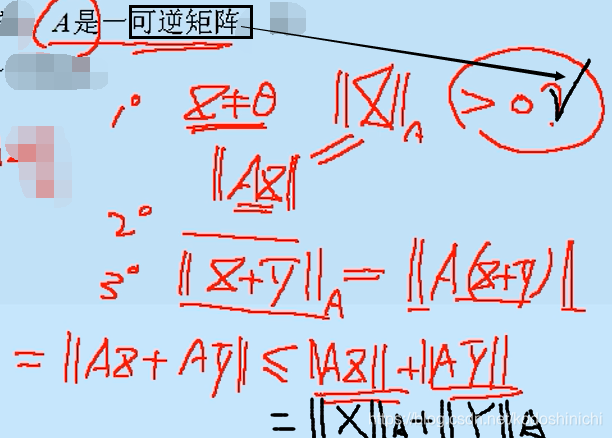 Tip:对于一个可逆矩阵A和一个非零向量x,Ax≠θ一定成立。可以用反证法论证。
Tip:对于一个可逆矩阵A和一个非零向量x,Ax≠θ一定成立。可以用反证法论证。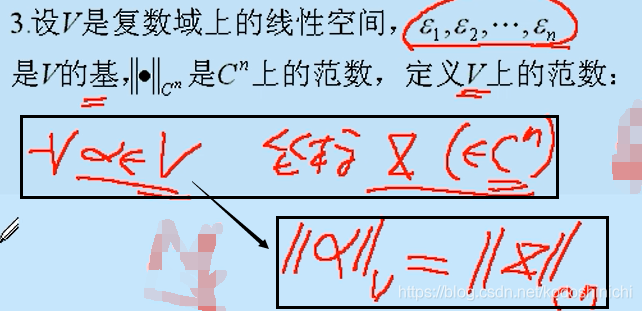
 (2)证明与理解 以下进行证明“两个范数是可比较的 ↔ 矩阵序列在两个范数下的极限值是相同的”
(2)证明与理解 以下进行证明“两个范数是可比较的 ↔ 矩阵序列在两个范数下的极限值是相同的”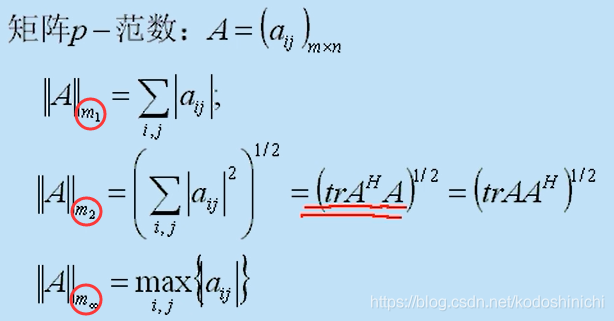
 【证明】利用矩阵2-范数的定义可以对以上结论很好地进行证明 ||A||F = (trAHA)1/2; ||UAV||F = (tr(UAV)H(UAV))1/2 = (tr(VHAHUHUAV))1/2 因为U是酉矩阵,所以满足UHU = I ||UAV||F = (trVHAHAV)1/2 因为V也是酉矩阵,所以满足VH = V-1 则||UAV||F = (trV-1AHAV)1/2,因为V-1AHAV与AHA一定是相似的,其二者具有相同的特征值 p.s. 矩阵的迹(tr)等于矩阵主对角线元素之和,也等于矩阵的全部特征值之和。 故证毕。
【证明】利用矩阵2-范数的定义可以对以上结论很好地进行证明 ||A||F = (trAHA)1/2; ||UAV||F = (tr(UAV)H(UAV))1/2 = (tr(VHAHUHUAV))1/2 因为U是酉矩阵,所以满足UHU = I ||UAV||F = (trVHAHAV)1/2 因为V也是酉矩阵,所以满足VH = V-1 则||UAV||F = (trV-1AHAV)1/2,因为V-1AHAV与AHA一定是相似的,其二者具有相同的特征值 p.s. 矩阵的迹(tr)等于矩阵主对角线元素之和,也等于矩阵的全部特征值之和。 故证毕。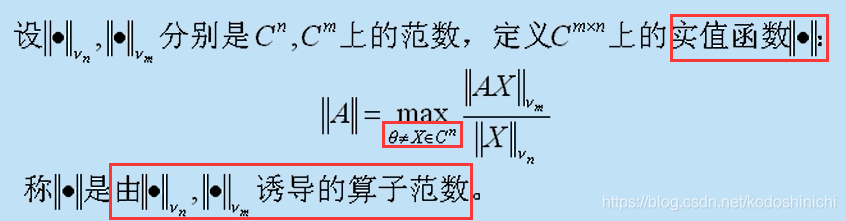
 (2)定理1——矩阵1范数,2范数相容,无穷大范数不相容
(2)定理1——矩阵1范数,2范数相容,无穷大范数不相容
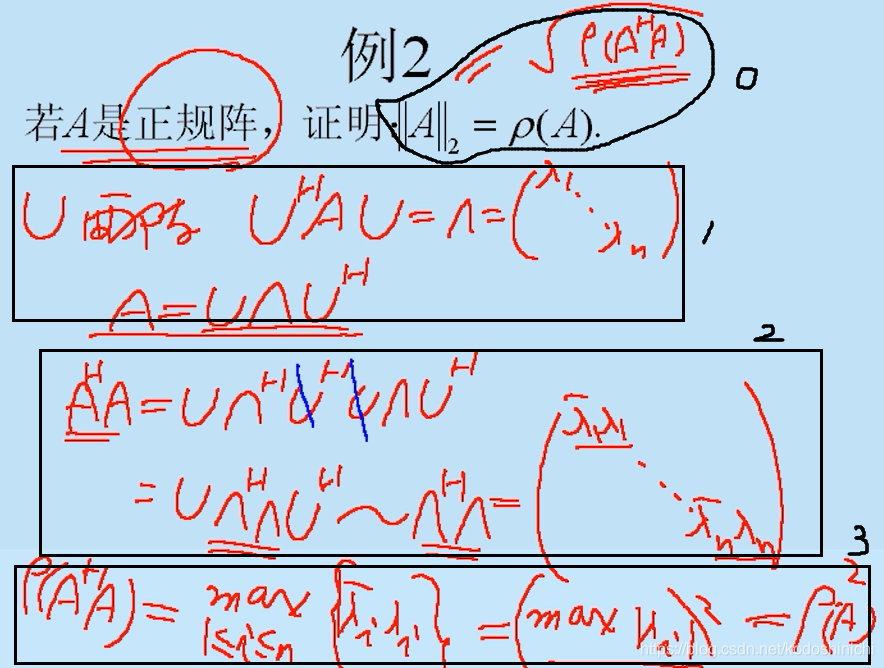 [0]:解读题意,0号框所示就是我们的证明目标; [1]:A是一个正规阵,那么A一定可以通过酉变换成为一个对角阵,将A用对角阵和酉矩阵相应表示出来; [2]:按照算子2范数的定义,需要计算AHA及其谱半径,可知道其相似于ΛHΛ; [3]:根据对角阵的运算,得到等式,两边同时开方即满足题意要求。
[0]:解读题意,0号框所示就是我们的证明目标; [1]:A是一个正规阵,那么A一定可以通过酉变换成为一个对角阵,将A用对角阵和酉矩阵相应表示出来; [2]:按照算子2范数的定义,需要计算AHA及其谱半径,可知道其相似于ΛHΛ; [3]:根据对角阵的运算,得到等式,两边同时开方即满足题意要求。【本文地址】