| 机器人学习 | 您所在的位置:网站首页 › 百度地图加标签 › 机器人学习 |
机器人学习
|
转自: 占据栅格地图构建(Occupancy Grid Map) - 知乎 占据栅格地图构建(Occupancy Grid Map)_「小白学移动机器人」一个专注分享移动机器人相关知识的公众号!-CSDN博客_构建栅格地图 用于学习参考用。 懂了占据栅格地图构建算法,就意味着SLAM问题不再是抽象的理论公式,它变成了浮现在你我脑海里的动态构建过程。这将对我们完整理解各种激光SLAM算法起着十分重要的作用。
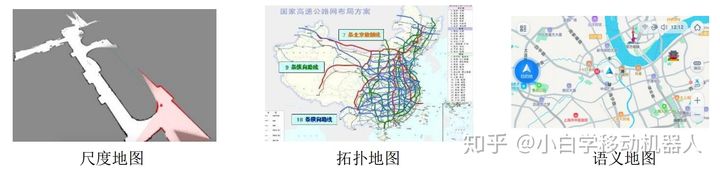
移动机器人常见的地图有三种:尺度地图、拓扑地图、语义地图。
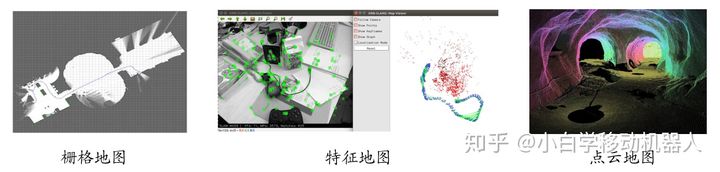
尺度地图:具有真实的物理尺寸,如栅格地图、特征地图、点云地图;常用于地图构建、定位、SLAM、小规模路径规划。 拓扑地图:不具备真实的物理尺寸,只表示不同地点的连通关系和距离,如铁路网,常用于超大规模的机器人路径规划。 语义地图:加标签的尺度地图,公认SLAM的未来--SLAM和深度学习的结合,常用于人机交互。 其中对尺度地图进行补充说明,如下图所示。
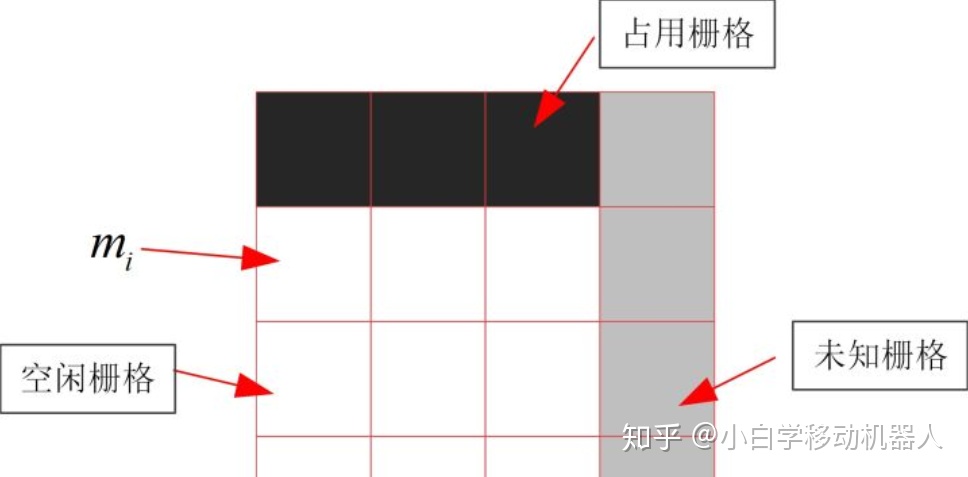
顾名思义,占据栅格地图构建算法当然构建的是栅格地图。 2.1、为什么使用占用栅格地图构建算法构建地图?在开始讲解之前,我们要明确一些事情。 第一,构建栅格地图需要使用激光雷达传感器。 第二,激光雷达传感器是有噪声存在的,通俗的说,"不一定准"。 举个例子,机器人在同一位姿下的不同时刻,通过激光雷达对一个固定的障碍物的探测距离不一致,一帧为5m,一帧为5.1m,我们难道要把5m和5.1m的位置都标记为障碍物?这也就是使用占据栅格地图构建算法的原因。 2.2、什么是占据栅格地图构建算法?为了解决这一问题,我们引入占据栅格地图(Occupancy Grid Map)的概念。我们将地图栅格化,对于每一个栅格的状态要么占用,要么空闲,要么未知(即初始化状态)。
关于占据栅格地图构建算法的引出、推导、演化,从下面的图片得出。(哈哈,图省事,在word里推导的)
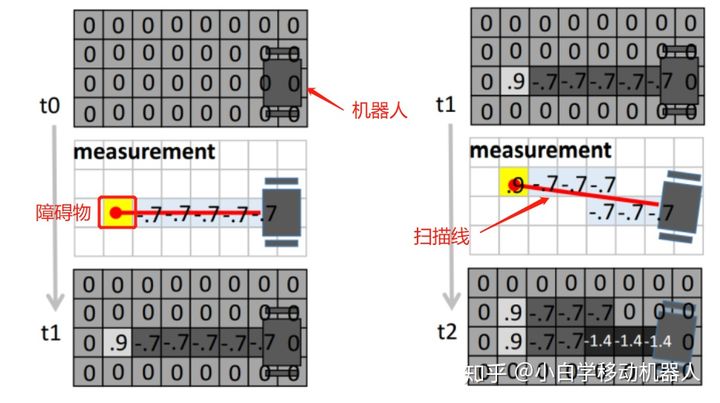
首先,我们假设 looccu = 0.9,lofree = -0.7。那么,显而易见,一个栅格状态的数值越大,就越表示该栅格为占据状态,相反数值越小,就表示改栅格为空闲状态。(这也就解决了此前文中提出的激光雷达观测值"不一定准"的问题)
上图是用两次激光扫描数据更新地图的过程。在结果中,颜色越深越表示栅格是空闲的,颜色越浅越表示是占据的。这里要区分常用的激光SLAM算法中的地图,只是表述方式的不同,没有对错之分。 3、如何通过激光数据构建栅格地图? 3.1、算法核心依据通过上述的讲解,你是否了抓住算法实现的的重要依据是什么?要是没有,你就要反思一下自己是否仔细读了这篇文章? 显然,整篇文章得出的一个结论就是下图所示,这里假设lofree和looccu为确定的数值,一般情况下一正一负。
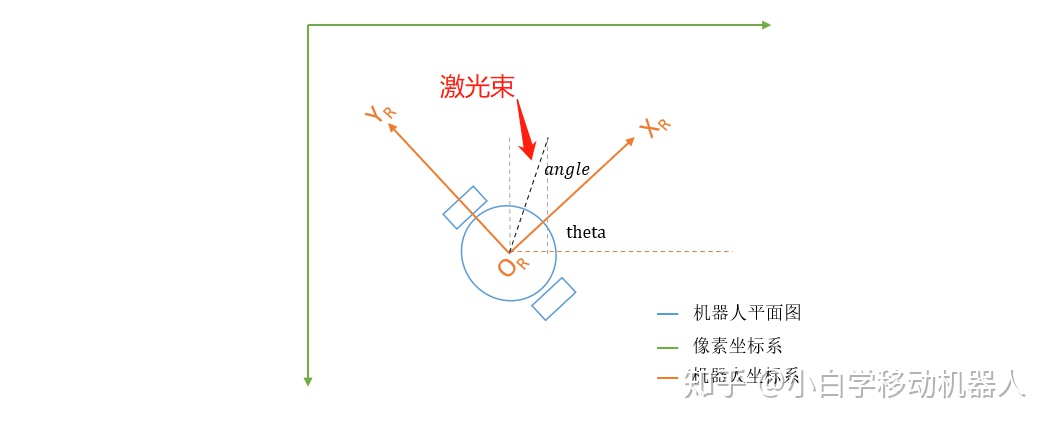
然后,我们通过激光雷达数据栅格进行判断,如果判定栅格是空闲,就执行上面公式;如果判定栅格是占据,就执行下面的公式。在经过许多帧激光雷达数据的洗礼之后,每一个栅格都存储了一个值,此时我们可以自己设定阈值与该值比较,来做栅格最终状态的判定。 3.2、算法输入数据激光雷达数据包(每个扫描点包含角度(逆时针为正方向)和距离,每帧激光数据包含若干扫描点,激光雷达数据包包含若干帧激光雷达数据) 机器人位姿数据包(每一个位姿包含世界坐标系下的机器人位置和航向角,初始航向角与世界坐标系X轴正方向重合,逆时针为正方向) 地图参数(需要构建地图的高度和宽度,构建地图的起始点,lofree和looccu的设定值,地图的分辨率) 假设激光雷达坐标系和机器人坐标系重合 3.3、算法步骤这里以处理第一帧激光雷达为例,从上向下依次介绍。 (1)读取一帧激光雷达数据和该帧对应的机器人位姿 //获取每一帧的激光雷达、机器人位姿数据 GeneralLaserScan scan = scans[i]; Eigen::Vector3d robotPose = robot_poses[i];(2)计算该帧机器人位置的栅格序号 //获取该帧机器人位姿的栅格序号 GridIndex robotIndex = ConvertWorld2GridIndex(robotPose(0),robotPose(1));即从世界坐标系转入栅格坐标系,每个栅格序号有x,y两个数字。这里与地图分辨率有关,比如说:地图分辨率为0.05,也就是1m用20个栅格表示。 例如:世界坐标系下机器人位置(1,1)对应栅格坐标系的(20,20)。 注意:世界坐标系与像素坐标系区分开来,他们之间的y轴方向相反,其他都一致,地图的显示使用的像素坐标系(栅格坐标系)。 (3)遍历该帧激光雷达数据的所有扫描点执行以下操作 计算每一个激光点击中栅格在像素坐标系下的栅格序号 //明确这里的世界坐标系world_x,不是真实的世界坐标系,而是像素坐标系,y轴与真实的世界坐标系相反,这样是laser_y加负号的原因 double laser_x = dist * cos(theta + angle); double laser_y = -dist * sin(theta + angle); //得到该激光扫描点,在世界坐标系下(像素坐标系下)的位置 double world_x = laser_x + robotPose(0); double world_y = laser_y + robotPose(1); //将该激光扫描点在世界坐标系下的位置,转化为栅格序号 GridIndex mapIndex = ConvertWorld2GridIndex(world_x,world_y);
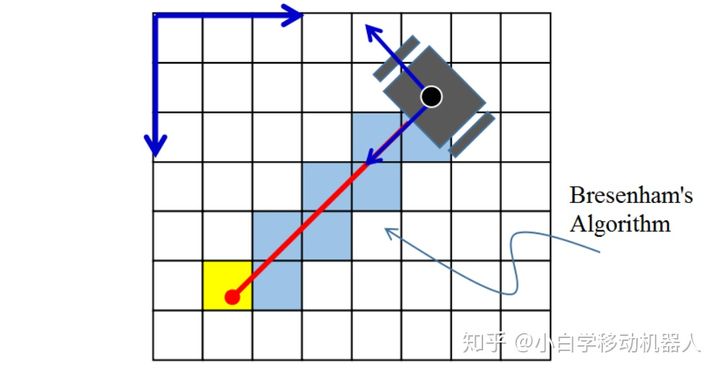
从当前机器人位姿的栅格序号到该激光扫描点的栅格序号划线,找出所有空闲的栅格序号 //从机器人的栅格序号到该激光扫描点的栅格序号划线 //目的:找到两点之间途径的空闲栅格,将栅格序号存入std::vector中 std::vector freeIndex = TraceLine(robotIndex.x,robotIndex.y,mapIndex.x,mapIndex.y);
遍历所有空闲的栅格更新空闲栅格状态 data += mapParams.log_free;//log_free=-1,data将变小更新该激光扫描点击中的栅格状态 data += mapParams.log_occ;//log_occ=2,data将变大(4)结束 4、占据栅格地图构建算法c++实现这里分享核心代码,具体算法功能包,可在公众号:小白学移动机器人,发送:栅格地图,即可获得。 本算法功能包,给出了详细的中文注释,是提升c++编程技能的阅读良品。 //占据栅格地图构建算法 //输入激光雷达数据和机器人位姿数据 //目的:通过遍历所有帧数据,为pMap[]中的每个穿过的空闲栅格或者击中栅格赋新值,中间有个计算方法,也就是占用栅格地图构建的理论实现 void OccupanyMapping(std::vector& scans,std::vector& robot_poses) { std::cout |


【本文地址】