| Heading/Pitch/Roll与Omega/Phi/Kappa简单介绍 | 您所在的位置:网站首页 › 电信网络怎么增强信号强弱 › Heading/Pitch/Roll与Omega/Phi/Kappa简单介绍 |
Heading/Pitch/Roll与Omega/Phi/Kappa简单介绍
|
Heading/Pitch/Roll vs Omega/Phi/Kappa
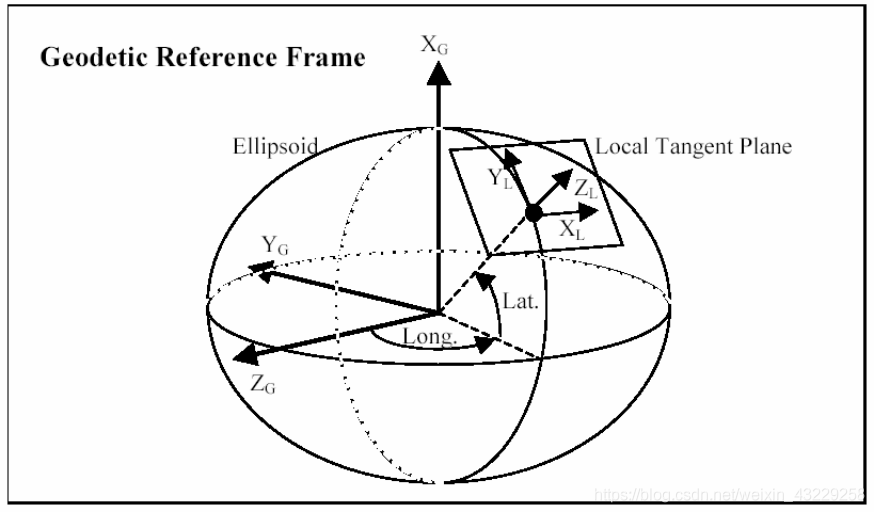
本人从事空中三角测量,经常使用这两套姿态信息,在国内外网站查的一些信息,我整理了一下。 Heading/Pitch/Roll首先说Heading, Pitch, and Roll。这些是将图像/传感器的x、y、z轴转化为局部水平面的三个旋转。一般来说,这些旋转是按顺序应用的。 Heading - 围绕Z轴的旋转。 Pitch - 围绕X轴旋转 Roll - 绕Y轴旋转 Heading、Pitch、Roll是将飞机(也就是图像)的轴与局部平面的X、Y、Z轴的角度。这个局部平面通常被定义为在曝光点处与大地椭圆体相切的平面。局部平面的北(+Y)轴是椭球体上的局部经线的正切线,指向极点。局部平面的东(+X)轴为大地椭球面的正切线,垂直于当地子午线。局部平面的上(+Z)轴垂直于大地椭球面,垂直于大地椭球面。
现在说Omega、Phi、Kappa形式的外部姿态。这三个旋转是图像参考系统与平面、投影映射平面(最常见的是UTM)之间的变换。这三种旋转通常是按顺序应用的。 Omega - 围绕X轴的旋转 Phi - 绕Y轴旋转 Kappa - 绕Z轴旋转 这些角度将产生与上述所有的转换(基于Heading、Pitch、Roll)相同的结果,直接将原始图像映射到UTM映射平面。由于航空摄影测量主要关注的是获取地理坐标系统,所以他們通常只用Omega, Phi, Kappa。 |
 可以应用Heading、Pitch、Roll旋转来将原始图像转换到局部切线平面上的正确位置。将图像轴对准飞机轴通常是非常简单的事情,可能包括交换X和Y,改变一个或多个角度上的符号,并应用校准偏移。之后,应用平移、俯仰和滚动旋转来将原始图像映射到局部切线平面。
可以应用Heading、Pitch、Roll旋转来将原始图像转换到局部切线平面上的正确位置。将图像轴对准飞机轴通常是非常简单的事情,可能包括交换X和Y,改变一个或多个角度上的符号,并应用校准偏移。之后,应用平移、俯仰和滚动旋转来将原始图像映射到局部切线平面。 照相机/传感器的坐标通常是以所谓的 “以地球为中心----地球固定”(ECEF)大地测量参考框架为基准。X、Y、Z坐标是从椭圆体中心开始测量的,而不是在一个平面上。它们也可以用纬度、经度和椭球体上的高度来表示。传统上,大多数GPS/INS应用于大地测量应用,其中椭球体参考系统是首选。然而,对于摄影测量应用来说,我们必须制作一张平面的影像图,在投影中可以随时使用,并与其他投影数据合并。我们有必要将我们的局部切线平面转换为测绘投影平面,如UTM等。 现在我们的图像已经对航向、俯仰、滚动进行了校正,但被映射到一个本地定义的平面。下一步是将我们的局部平面图像转换为基于世界的投影,如UTM。局部切线平面是参照大地椭球体来定义的。它是在曝光点处与椭圆体的切线。UTM投影是通过将椭球体地球投影到一个圆柱体上形成的。圆柱体被横向放置在椭球体上,沿经纬线切线与地球相切。这个切线的子午线称为中心子午线。当我们将圆柱体展开形成平面图时,中心子午线将保持为沿UTM+Y轴的垂直线。当你离开中心子午线时,其他子午线会出现越来越多的上翘,在两极与中心子午线汇合。而经过局部平面切线点的局部经线通常不会与中心经线重合。这意味着局部切线平面的X轴和Y轴与UTM投影的X轴和Y轴会有差异。在这两个系统中,Z轴在任何地方都会有差异,除非局部切线点正好在中心子午线上。
照相机/传感器的坐标通常是以所谓的 “以地球为中心----地球固定”(ECEF)大地测量参考框架为基准。X、Y、Z坐标是从椭圆体中心开始测量的,而不是在一个平面上。它们也可以用纬度、经度和椭球体上的高度来表示。传统上,大多数GPS/INS应用于大地测量应用,其中椭球体参考系统是首选。然而,对于摄影测量应用来说,我们必须制作一张平面的影像图,在投影中可以随时使用,并与其他投影数据合并。我们有必要将我们的局部切线平面转换为测绘投影平面,如UTM等。 现在我们的图像已经对航向、俯仰、滚动进行了校正,但被映射到一个本地定义的平面。下一步是将我们的局部平面图像转换为基于世界的投影,如UTM。局部切线平面是参照大地椭球体来定义的。它是在曝光点处与椭圆体的切线。UTM投影是通过将椭球体地球投影到一个圆柱体上形成的。圆柱体被横向放置在椭球体上,沿经纬线切线与地球相切。这个切线的子午线称为中心子午线。当我们将圆柱体展开形成平面图时,中心子午线将保持为沿UTM+Y轴的垂直线。当你离开中心子午线时,其他子午线会出现越来越多的上翘,在两极与中心子午线汇合。而经过局部平面切线点的局部经线通常不会与中心经线重合。这意味着局部切线平面的X轴和Y轴与UTM投影的X轴和Y轴会有差异。在这两个系统中,Z轴在任何地方都会有差异,除非局部切线点正好在中心子午线上。 
 目前有些软件可以相互转换,把Heading、Pitch、Roll转换为Omega、Phi、Kappa。我是搞航空摄影测量的,常用的空三软件例如Inpho或者Photoscan等软件都支持两个格式。
目前有些软件可以相互转换,把Heading、Pitch、Roll转换为Omega、Phi、Kappa。我是搞航空摄影测量的,常用的空三软件例如Inpho或者Photoscan等软件都支持两个格式。【本文地址】