| 【计算机视觉】相机畸变校正(Lens Distortion Correction) | 您所在的位置:网站首页 › 照片畸变是什么样的 › 【计算机视觉】相机畸变校正(Lens Distortion Correction) |
【计算机视觉】相机畸变校正(Lens Distortion Correction)
|
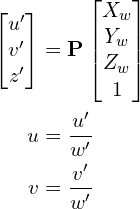
正如文章中所解释的,要找到一个3D点在图像平面上的投影,我们首先需要使用外部参数(Rotation R和Translation T)将这个点从世界坐标系转换到摄像机坐标系。接下来,利用相机的内在参数,我们将点投影到图像平面上。 三维点
其中,P是一个3×4投影矩阵,由两部分组成:包含内部参数的内参矩阵(K)和由3×3旋转矩阵R和3×1平移向量t组合而成的外参矩阵。
如前所述,本征矩阵K是上三角矩阵:
其中,
相机标定的目标 校准过程的目标是使用一组已知的3D点 总之,摄像机标定算法有以下输入和输出: 输入:已知二维图像坐标和三维世界坐标的点的图像集合。 输出:3x3的相机内参矩阵,每张图像的旋转和平移。注意:在OpenCV中,相机内参矩阵不包含倾斜参数。这个矩阵就是这种形式
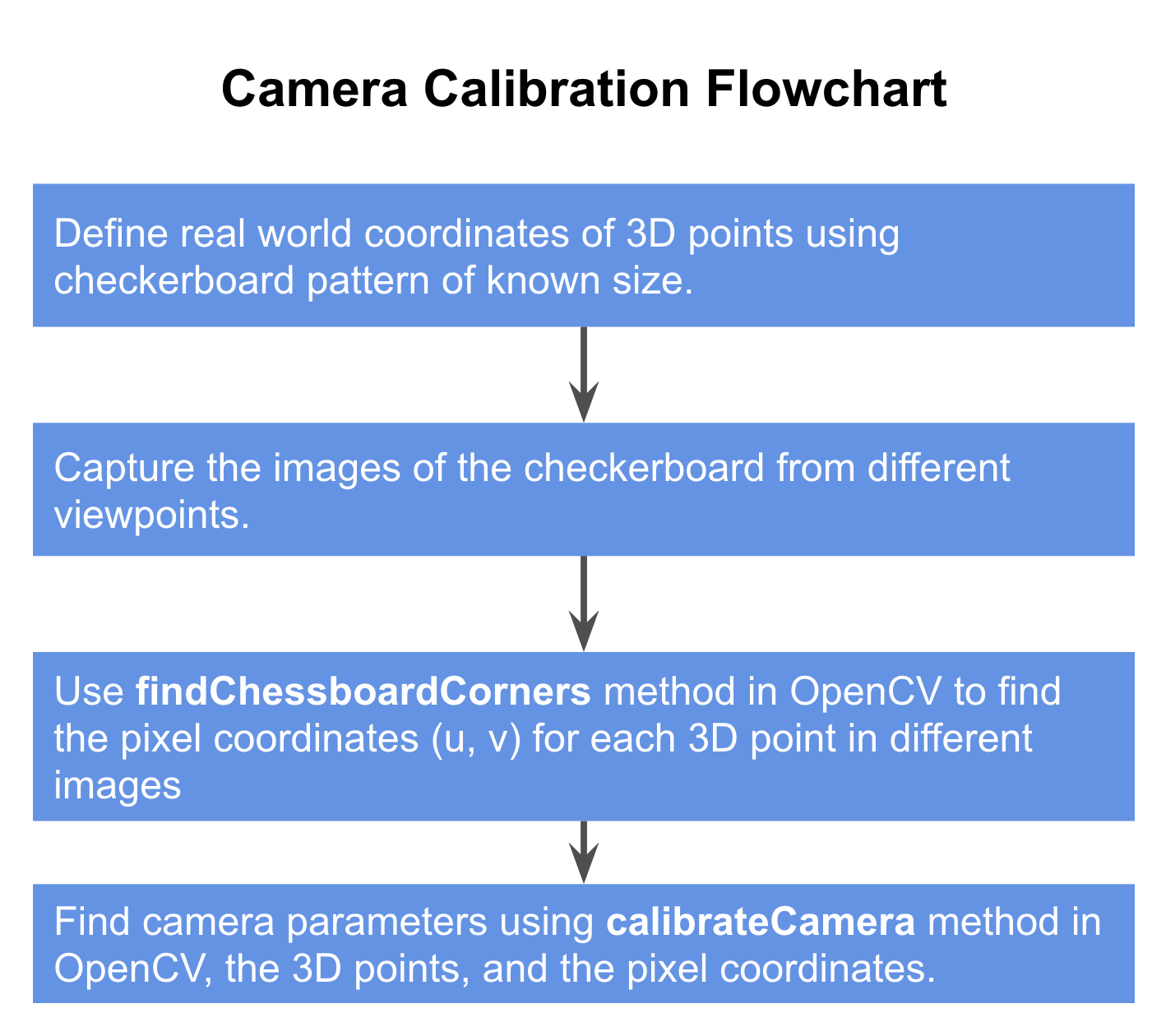
不同类型的相机标定方法 以下是几种主要的相机标定方法: 校准模式:当我们完全控制成像过程时,进行校准的最佳方式是从不同的视角捕捉一个物体或已知尺寸的模式的几张图像。我们将在这篇文章中学习的基于棋盘的方法属于这一类。我们也可以用已知尺寸的圆形图案来代替棋盘图案。 几何线索:有时我们在场景中会有其他几何线索,如直线和消失点,这些线索可以用于校准。 基于深度学习的:当我们对成像设置几乎没有控制时(例如,我们只有场景的一张图像),仍然可以使用基于深度学习的方法获得相机的校准信息。相机标定的步骤 用以下流程图来描述相机标定的步骤:
具体细节此处不再详述,参考:https://learnopencv.com/camera-calibration-using-opencv/ ->相机标定的python实现: #!/usr/bin/env python import cv2 import numpy as np import os import glob # Defining the dimensions of checkerboard CHECKERBOARD = (6,9) criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # Creating vector to store vectors of 3D points for each checkerboard image objpoints = [] # Creating vector to store vectors of 2D points for each checkerboard image imgpoints = [] # Defining the world coordinates for 3D points objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32) objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2) prev_img_shape = None # Extracting path of individual image stored in a given directory images = glob.glob('./images/*.jpg') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # Find the chess board corners # If desired number of corners are found in the image then ret = true ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH + cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE) """ If desired number of corner are detected, we refine the pixel coordinates and display them on the images of checker board """ if ret == True: objpoints.append(objp) # refining pixel coordinates for given 2d points. corners2 = cv2.cornerSubPix(gray, corners, (11,11),(-1,-1), criteria) imgpoints.append(corners2) # Draw and display the corners img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret) cv2.imshow('img',img) cv2.waitKey(0) cv2.destroyAllWindows() h,w = img.shape[:2] """ Performing camera calibration by passing the value of known 3D points (objpoints) and corresponding pixel coordinates of the detected corners (imgpoints) """ ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) print("Camera matrix : \n") print(mtx) print("dist : \n") print(dist) print("rvecs : \n") print(rvecs) print("tvecs : \n") print(tvecs)->相机标定的C++实现: #include #include #include #include #include #include // Defining the dimensions of checkerboard int CHECKERBOARD[2]{6,9}; int main() { // Creating vector to store vectors of 3D points for each checkerboard image std::vector objpoints; // Creating vector to store vectors of 2D points for each checkerboard image std::vector imgpoints; // Defining the world coordinates for 3D points std::vector objp; for(int i{0}; i |
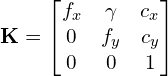
 是光学中心在接收平面中的x坐标和y坐标。使用图像的中心通常是一个足够好的近似。
是光学中心在接收平面中的x坐标和y坐标。使用图像的中心通常是一个足够好的近似。 是坐标轴之间的斜度。通常是0。
是坐标轴之间的斜度。通常是0。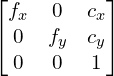
【本文地址】
公司简介
联系我们