| 【6. 激光雷达接入ROS】 | 您所在的位置:网站首页 › 激光雷达模型设计 › 【6. 激光雷达接入ROS】 |
【6. 激光雷达接入ROS】
|
欢迎大家阅读2345VOR的博客【6. 激光雷达接入ROS】🥳🥳🥳2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹本文章属于《Ubuntu学习》和《ROS机器人学习》 :围绕Ubuntu系统基本配置及相关命令行学习记录!机器人操作系统 (ROS) 是一组软件库和工具,可帮助您构建机器人应用程序。👍👍👍
1. 前言
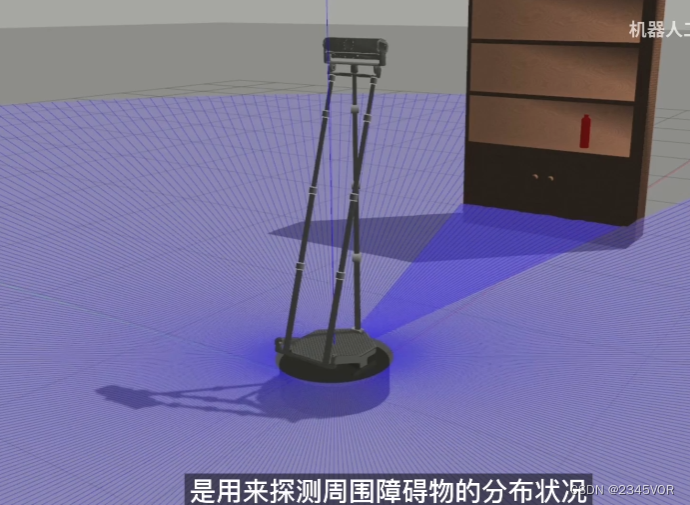
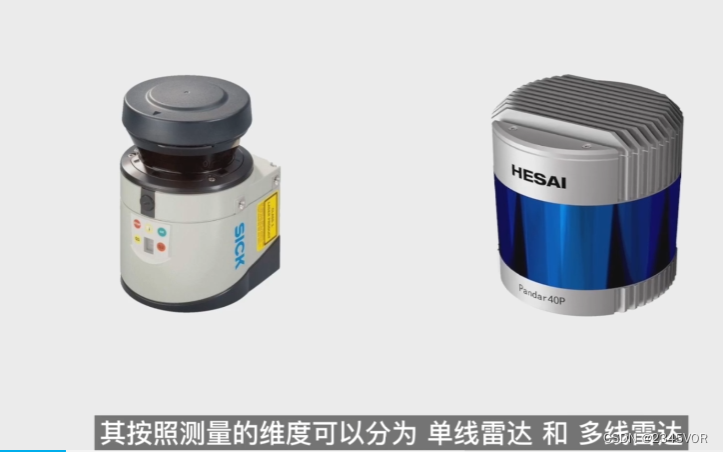
Ubuntu环境搭建 【经典Ubuntu20.04版本U盘安装双系统教程】 【Windows10安装或重装ubuntu18.04双系统教程】 【Ubuntu同步系统时间】 【Ubuntu中截图工具】 【Ubuntu安装QQ】 【Ubuntu安装后基本配置】 【Ubuntu启动菜单的默认项】 【ubuntu系统中修改hosts配置】 【18.04Ubuntu中解决无法识别显示屏】 ROS学习笔记 【1. Ubuntu18.04安装ROS Melodic】 【2. 在Github上寻找安装ROS软件包】 【3. 初学ROS,年轻人的第一个Node节点】 【4. ROS的主要通讯方式:Topic话题与Message消息】 【5. ROS机器人的运动控制】 接下来学习激光雷达如何接入ros机器人,激光雷达是用来探测周围障碍物的分布状况! 其按照测量的维度可以分为单线雷达和多线雷达
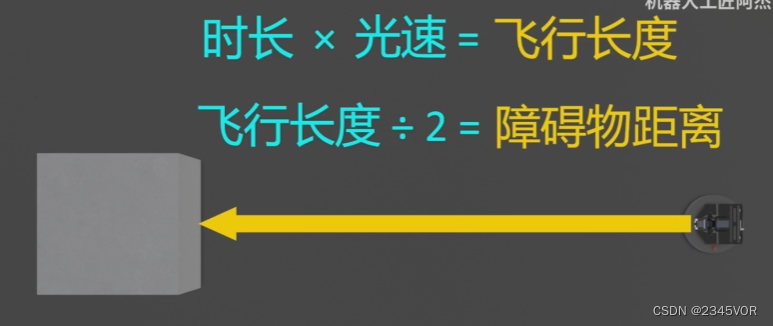
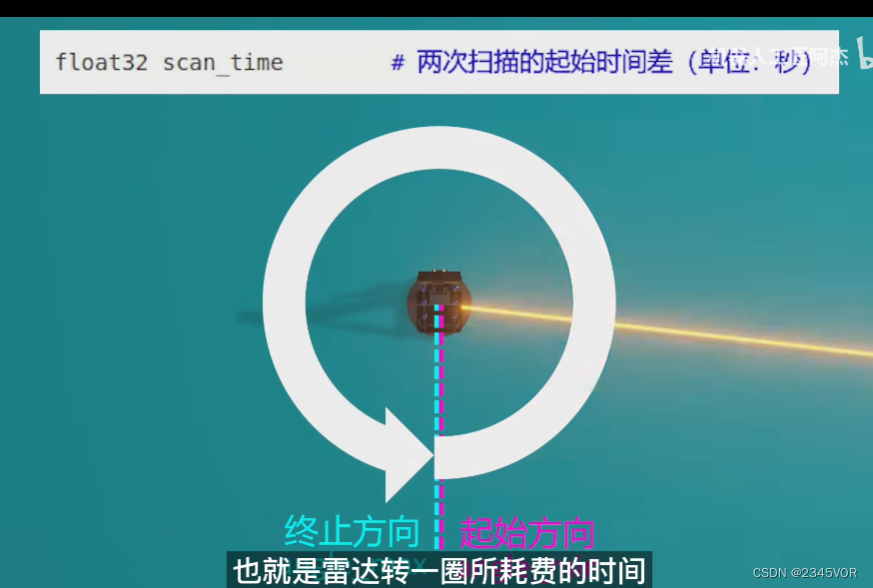
简单来说,就是计算光的“飞行时间”。
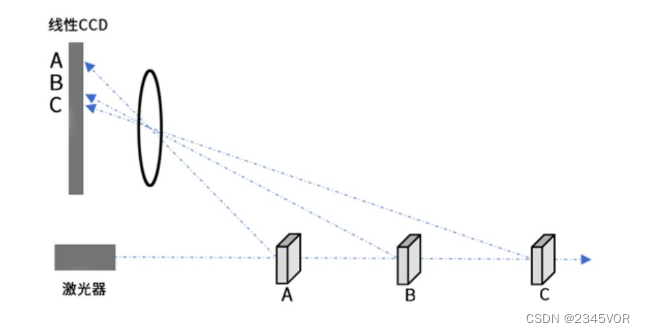
由激光器发射一个激光脉冲,通过计时器记录下光的出射和回返的时间,两个时间相减即可得到光的“飞行时间”,而光速是固定的,根据已知速度和时间就可以计算出距离。 3.2 何为三角测距?三角测距采用激光器发射激光,在照射到物体之后,反射光会由线性CCD接收,因为激光器和探测器间隔了一段距离,所以根据光学路径,不同距离的物体将会在CCD上成像在不同的位置,按照三角公式进行计算,就可以推导出被测物体的距离。 TOF激光雷达计算如下
RViz这个工具的全名叫做 The Robot Visualization Tool
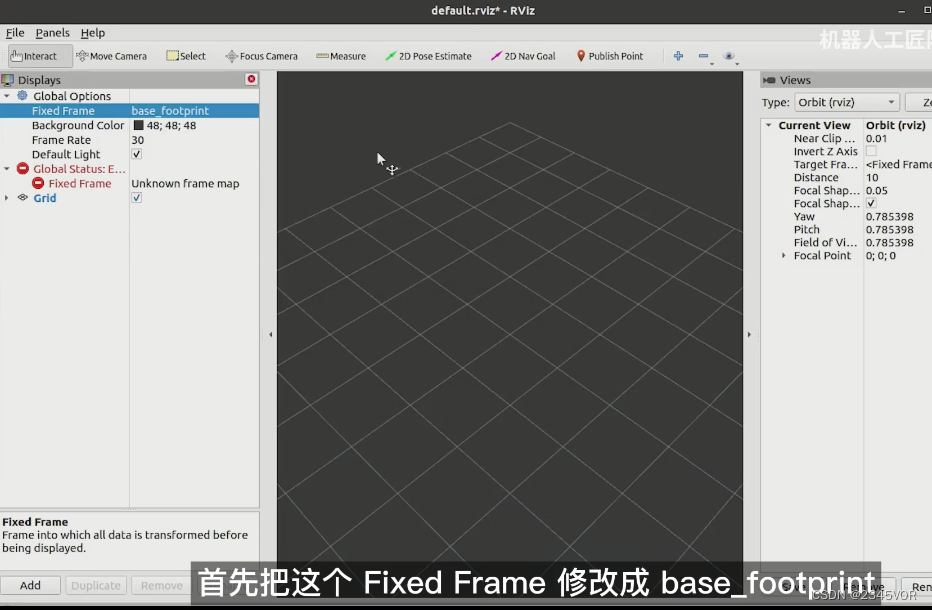
打开三个终端分别运行三条指令 roscore roslaunch wpr_simulation wpb_simple.launch rviz首先把这个Fixed Frame修改成base_footprint
点击file菜单,选择Save Config As 然后在RViz中的file菜单,选择Open Config
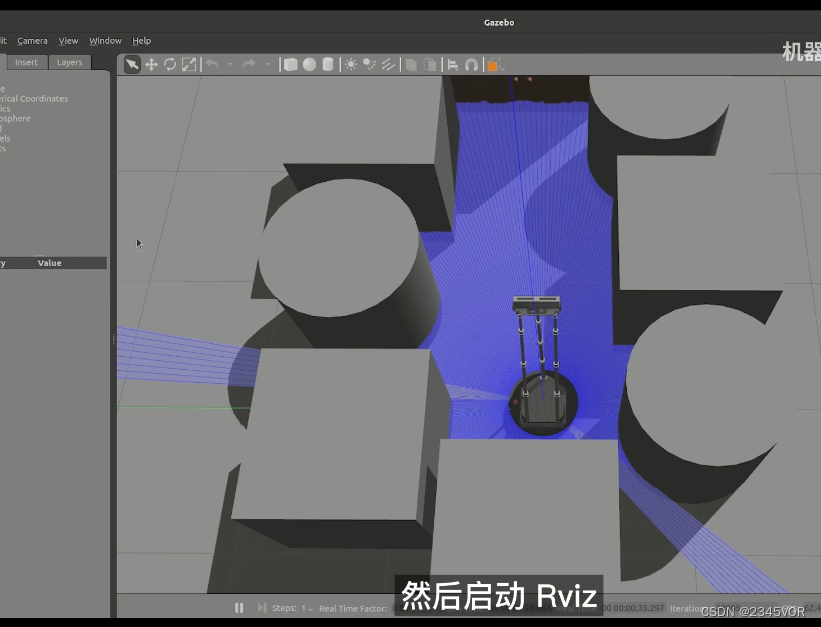
还可以在launch文件里自动加载rviz配置文件 先关闭RViz,然后打开终端输入 roslaunch wpr_simulation wpb_rviz.launch
打开三个终端分别运行三条指令 roscore roslaunch wpr_simulation wpb_simple.launch roslaunch wpr_simulation wpb_rviz.launch
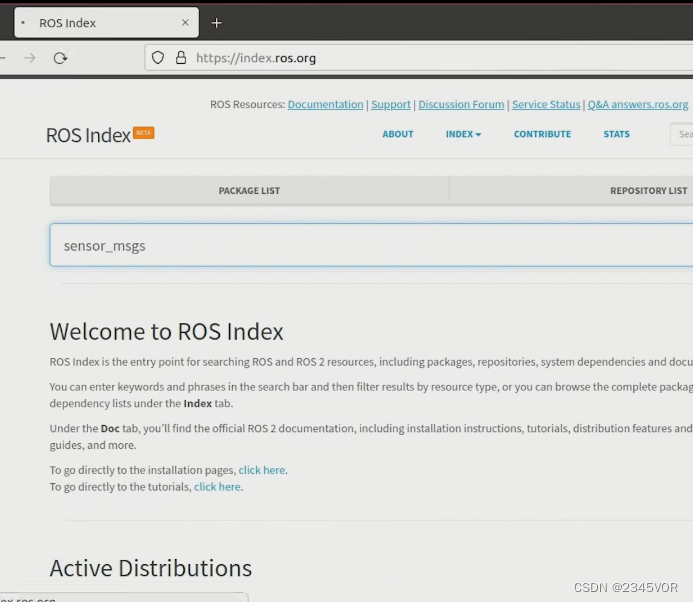
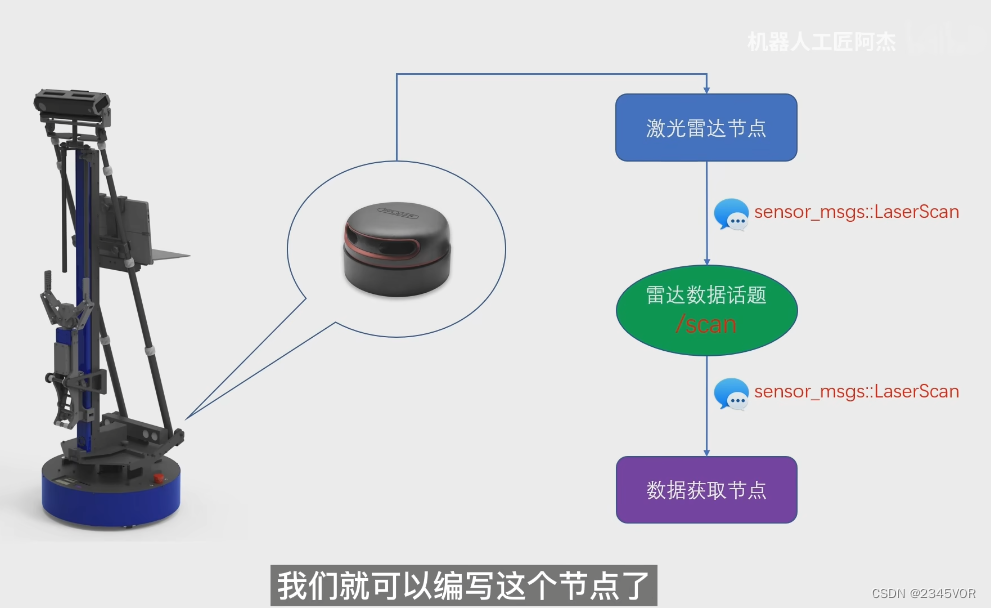
在Gazebo中围绕机器人堆积障碍物 进入ROS Index官网搜索sensor_msgs
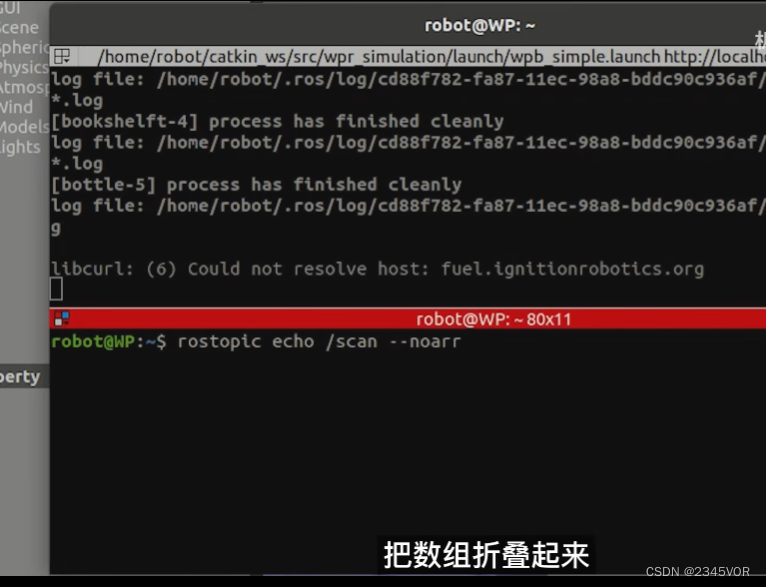
新开终端输入 rostopic echo /scan --noarr
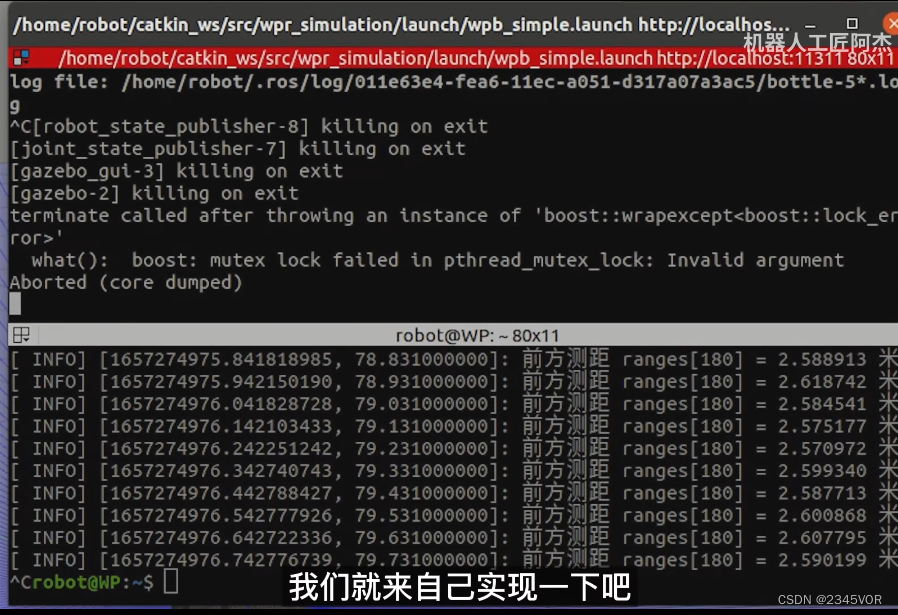
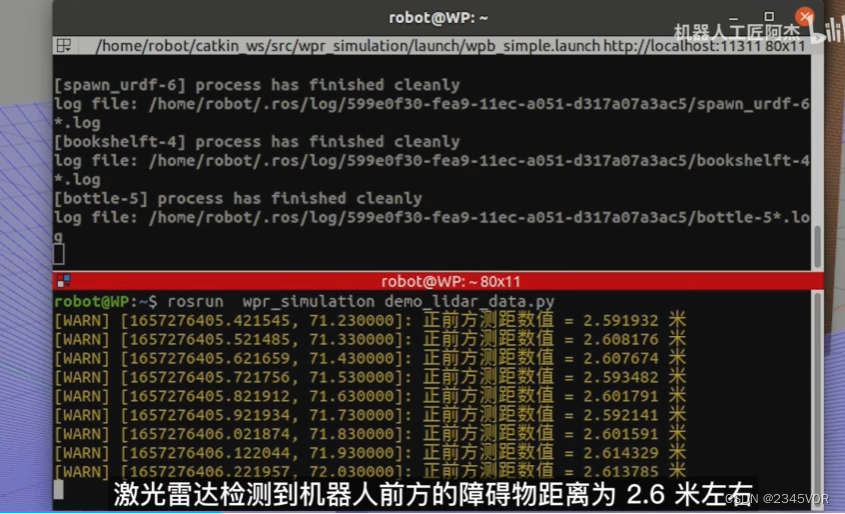
采用wpr_simulation开源工程,打开三个终端分别运行三条指令 roscore roslaunch wpr_simulation wpb_simple.launch rosrunwpr_simulation deno_lidar_data
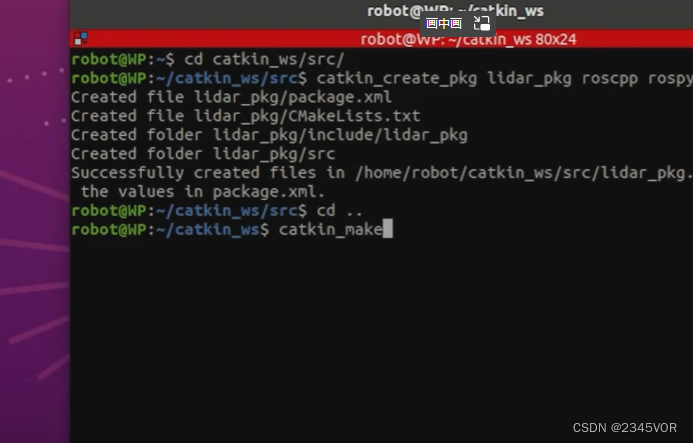
构思 在工作空间src文件创建基于sensor_msgs模板的lidar_pkg cd ~/catkin_ws/src/ catkin_create_pkg lidar_pkg roscpp rospy sensor_msgs
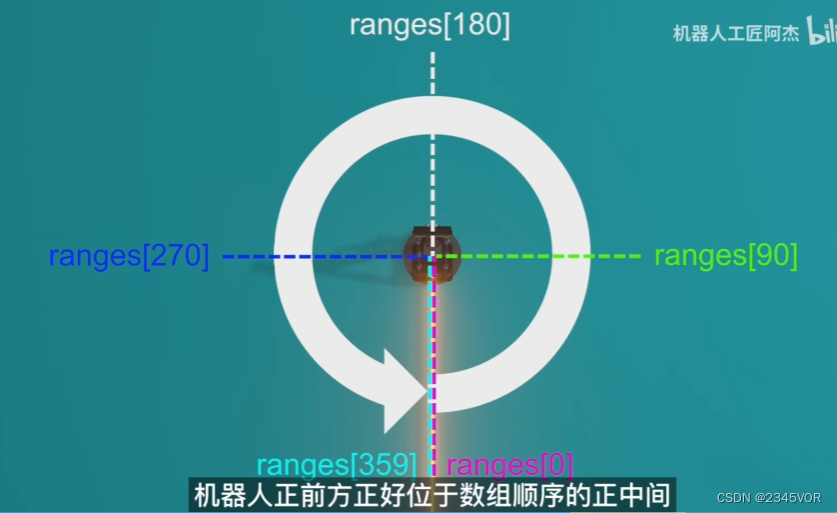
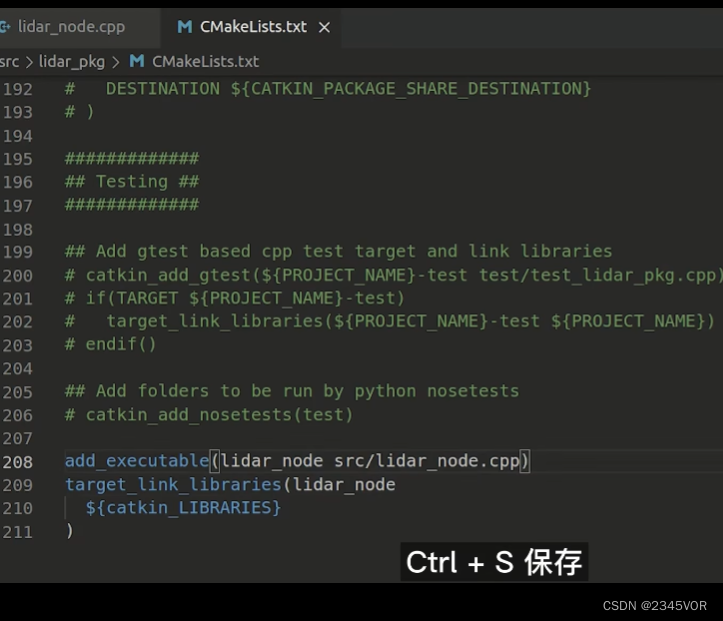
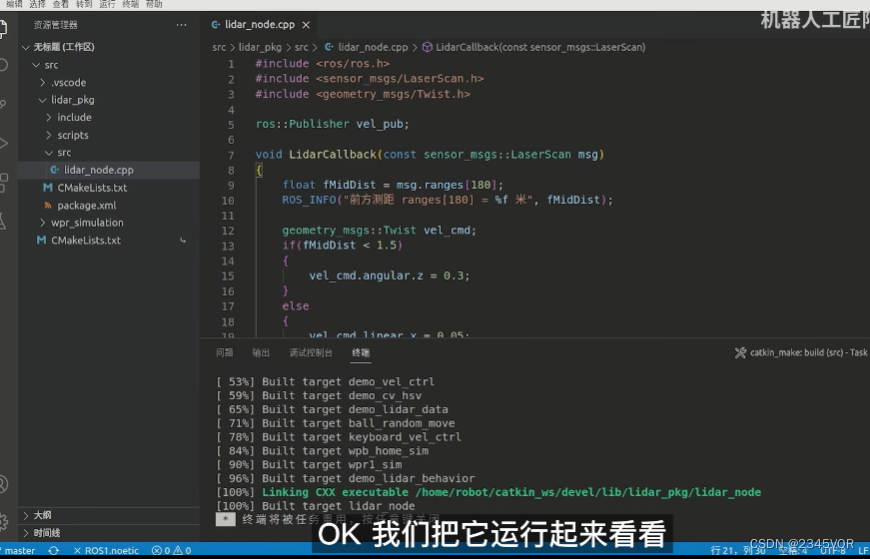
lidar_node源码 #include #include void Lidarcallback(const sensor_msgs::LaserScan msg) { float fMidDist = msg.ranges[180] ; ROS_INFO("前方测距ranges [180]=%f 米", fMidDist); } int main(int argc,char *argv[]) { setlocale(LC_ALL, "" ); ros::init(argc, argv,"lidar_node" ); ros::NodeHandle n; ros::Subscriber lidar_sub = n.subscribe( " /scan", 10, &LidarCallback); ros::spin(); return 0; }ctrl+s快捷保存 6.5 设置C++编译规则打开CMake文件 add_executable(lidar_node src/lidar_node.cpp) target_link_libraries(lidar_node ${catkin_LIBRARIES} )ctrl+s快捷保存 编译,打开终端 cd ~/catkin_ws/ catkin_make采用wpr_simulation开源工程,打开三个终端分别运行三条指令 roscore roslaunch wpr_simulation wpb_simple.launch rosrun lidar_pkg lidar_node
采用wpr_simulation开源工程,打开三个终端分别运行三条指令 roscore roslaunch wpr_simulation wpb_simple.launch rosrun wpr_simulation deno_lidar_data.py
构思 在工作空间src文件创建基于sensor_msgs模板的lidar_pkg,编译 cd ~/catkin_ws/src/ catkin_create_pkg lidar_pkg roscpp rospy sensor_msgs cd .. catkin_make
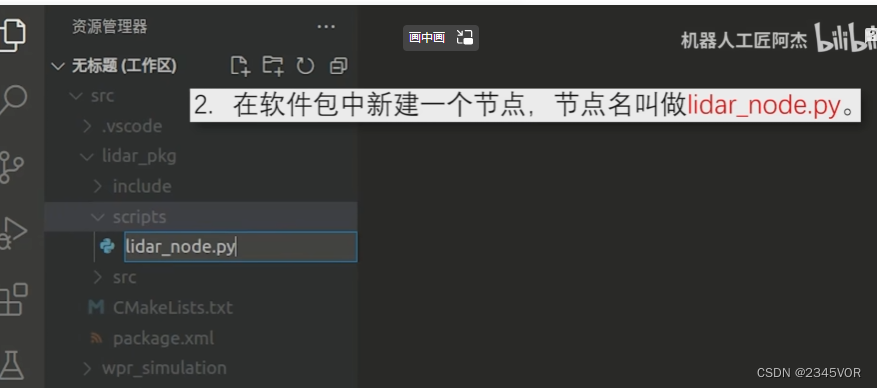
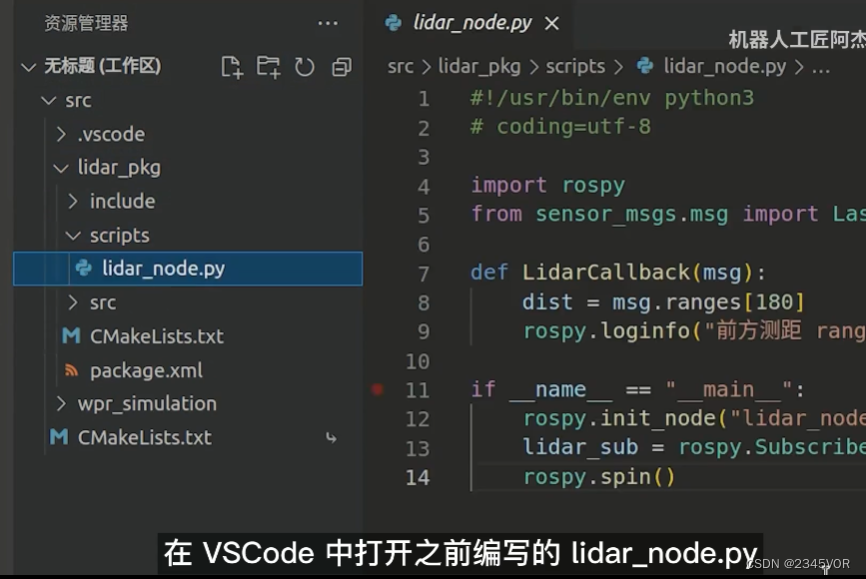
在lidar_pkg文件夹下新建script文件夹中创建lidar_node.py
先引入python包,设置中文utf-8显示 ros>=20.04,采用python3ros vel_cmd.angular.z = 0.3; } else { vel_cmd.linear.x = 0.05; } vel_pub.publish(vel_cmd); } int main(int argc,char *argv[]) { setlocale(LC_ALL, "" ); ros::init(argc, argv,"lidar_node" ); ros::NodeHandle n; ros::Subscriber lidar_sub = n.subscribe( " /scan", 10, &LidarCallback); ros::spin(); return 0; }ctrl+s快捷保存 ctrl+shift+b快捷编译 采用wpr_simulation开源工程,打开三个终端分别运行三条指令 roscore roslaunch wpr_simulation wpb_simple.launch rosrun lidar_pkg lidar_node
当机器人检测前方障碍物时,最简单把转弯角度调大一点,原地转弯 lidar_node源码 #include #include #include ros::Publisher vel_pub; int ncount = 0; void Lidarcallback(const sensor_msgs::LaserScan msg) { float fMidDist = msg.ranges[180] ; ROS_INFO("前方测距ranges [180]=%f 米", fMidDist); if(ncount > 0) { ncount--; return; } geometry msgs::Twist vel_cmd ; if( fMidDist vel_cmd.linear.x = 0.05; } vel_pub.publish(vel_cmd); } int main(int argc,char *argv[]) { setlocale(LC_ALL, "" ); ros::init(argc, argv,"lidar_node" ); ros::NodeHandle n; ros::Subscriber lidar_sub = n.subscribe( " /scan", 10, &LidarCallback); ros::spin(); return 0; }ctrl+s快捷保存 ctrl+shift+b快捷编译 然后在调试就OK啦 可参照开源项目wpr_simulation下的src文件夹的demo_lidar_behavior.cpp
构思 打开7.4编写lidar_node.py lidar_node.py源码 #!/usr/bin/env python3 #coding=utf-8 import rospy from sensor_msgs.msg import LaserScan from geometry_msgs.msg import Twist count =0 def Lidarcallback(msg): global vel_pub global count dist = msg.ranges [ 180] rospy.loginfo("前方测距 ranges [ 180] = %f 米" , dist) if count > 0: count = count - 1 return vel_cmd = Twist() if dist |
 按照测量原理分为三角测距雷达和TOF雷达
按照测量原理分为三角测距雷达和TOF雷达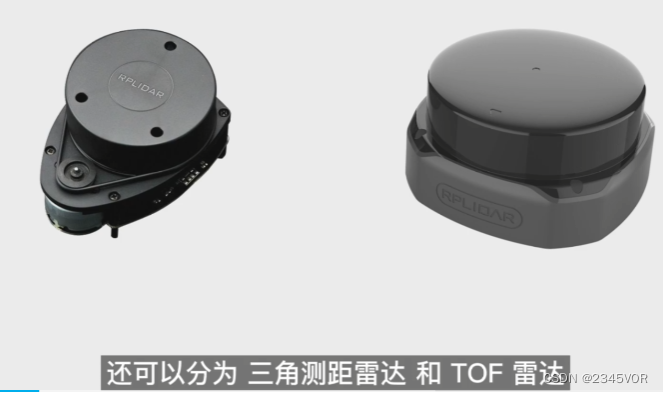 根据工作方式分为机械旋转雷达和固态雷达
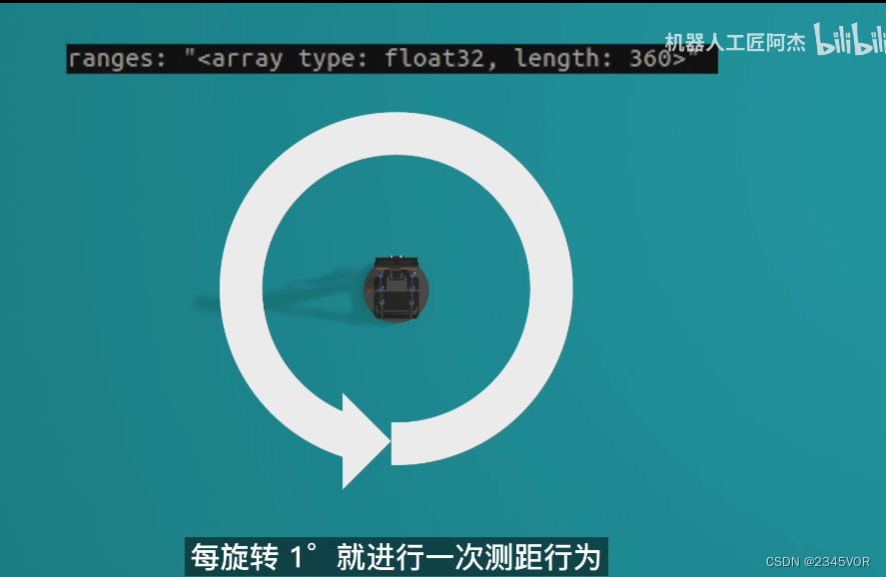
根据工作方式分为机械旋转雷达和固态雷达 激光雷达虽各有不同,但是在ROS中呈现的数据格式是一样的,只是在数据完整度和精度上会有所差异。下面就选取TOF激光雷达作为例子
激光雷达虽各有不同,但是在ROS中呈现的数据格式是一样的,只是在数据完整度和精度上会有所差异。下面就选取TOF激光雷达作为例子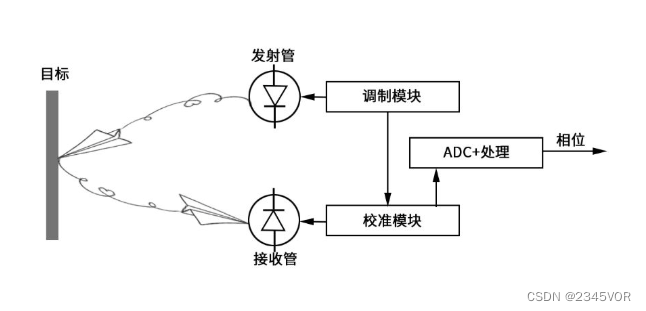
 状态栏添加机器人模型,最后点击ok
状态栏添加机器人模型,最后点击ok 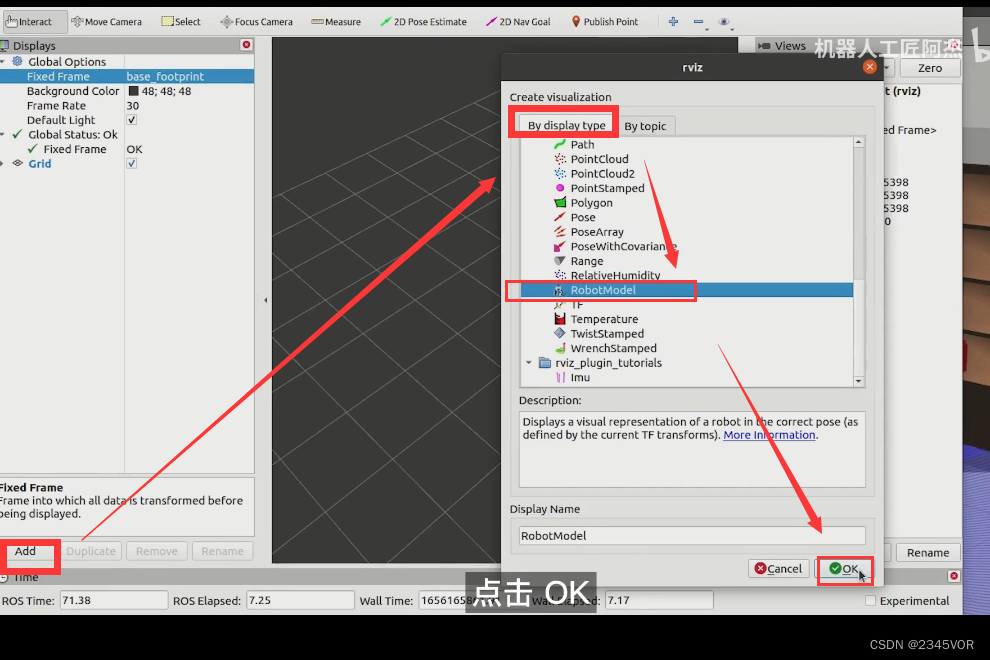 选择激光雷达的话题名称/scan
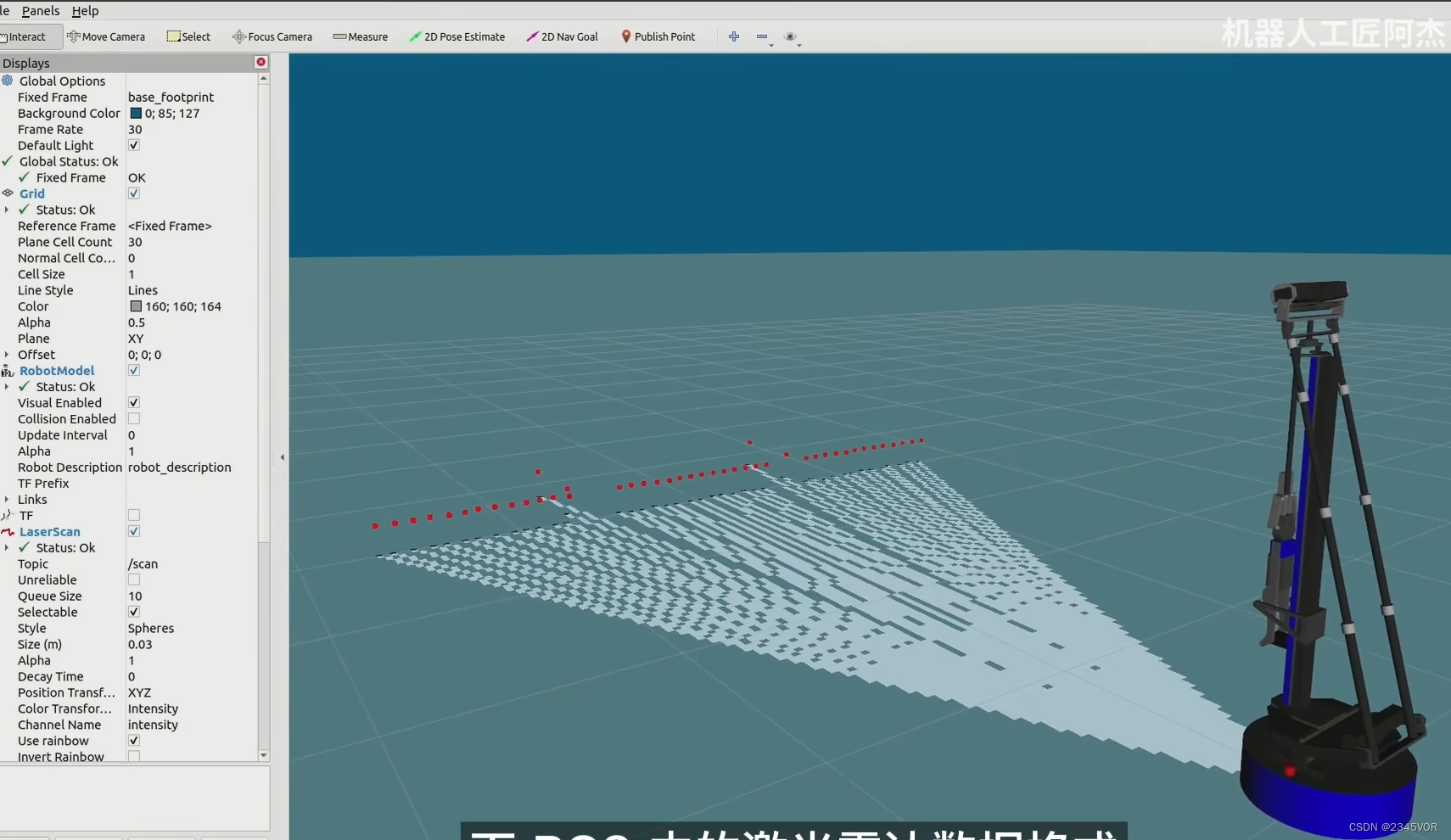
选择激光雷达的话题名称/scan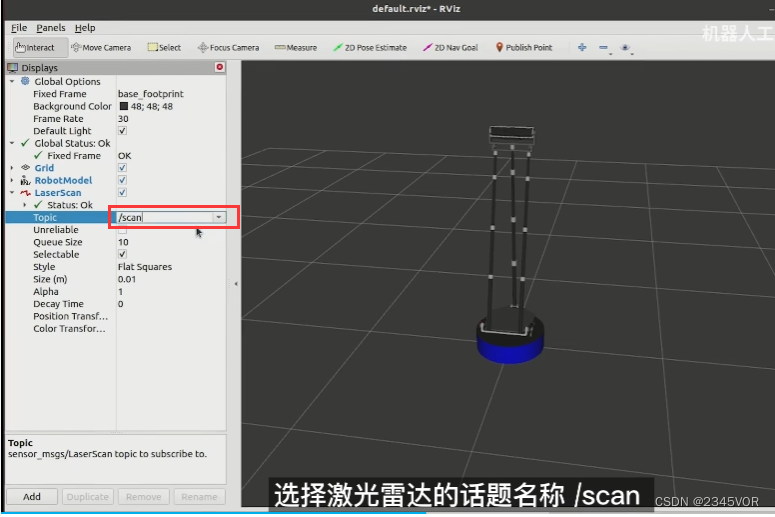 调整size为0.03
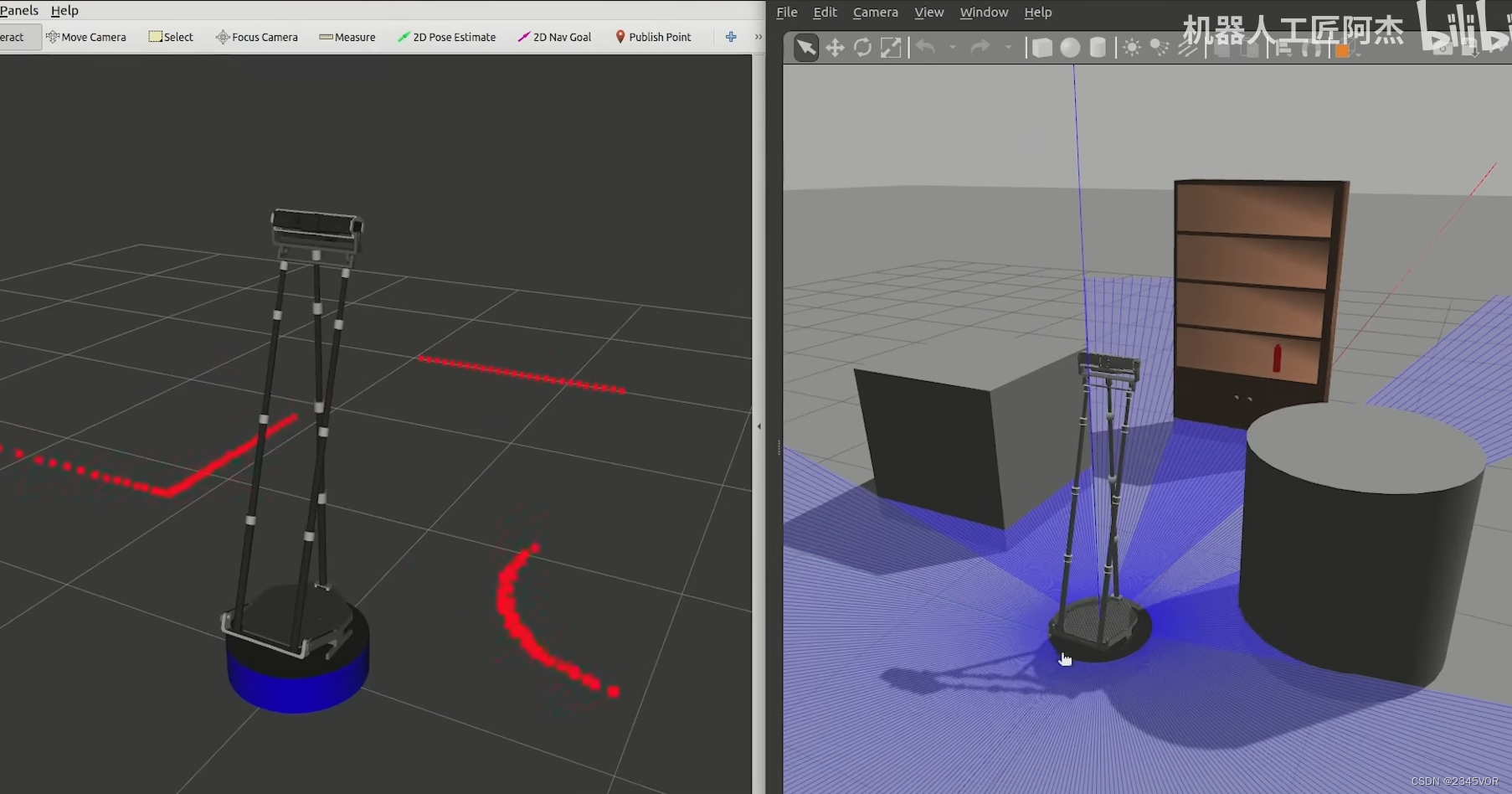
调整size为0.03 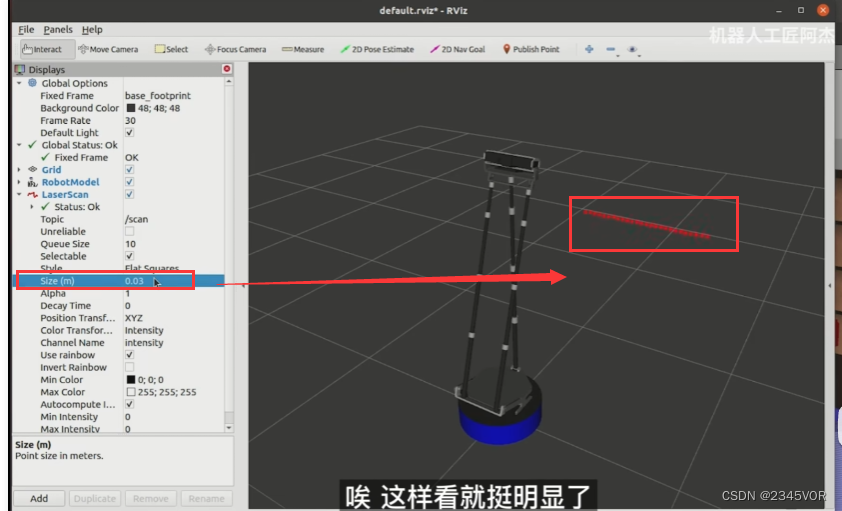 调整RViz和Gazebo分屏
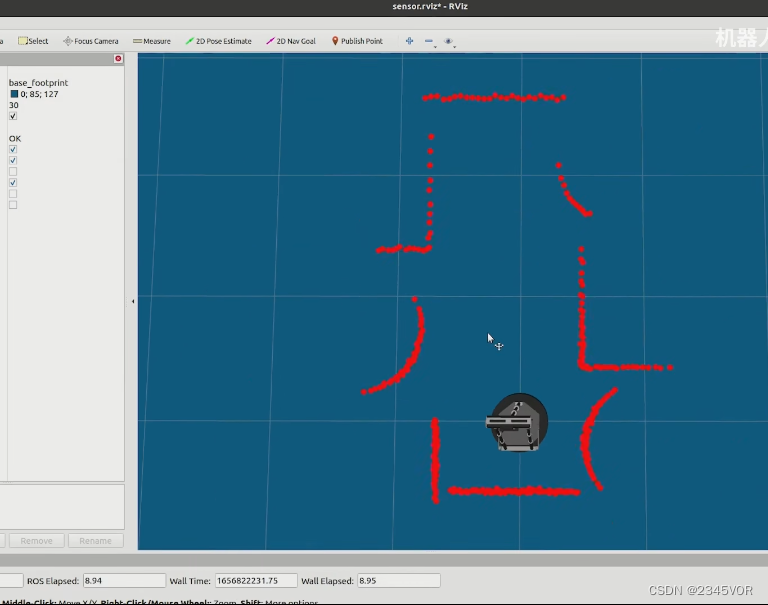
调整RViz和Gazebo分屏 Gazebo是模拟真实机器人发出传感器数据的工具 RViz显示的是机器人实际能探测到的环境状况
Gazebo是模拟真实机器人发出传感器数据的工具 RViz显示的是机器人实际能探测到的环境状况 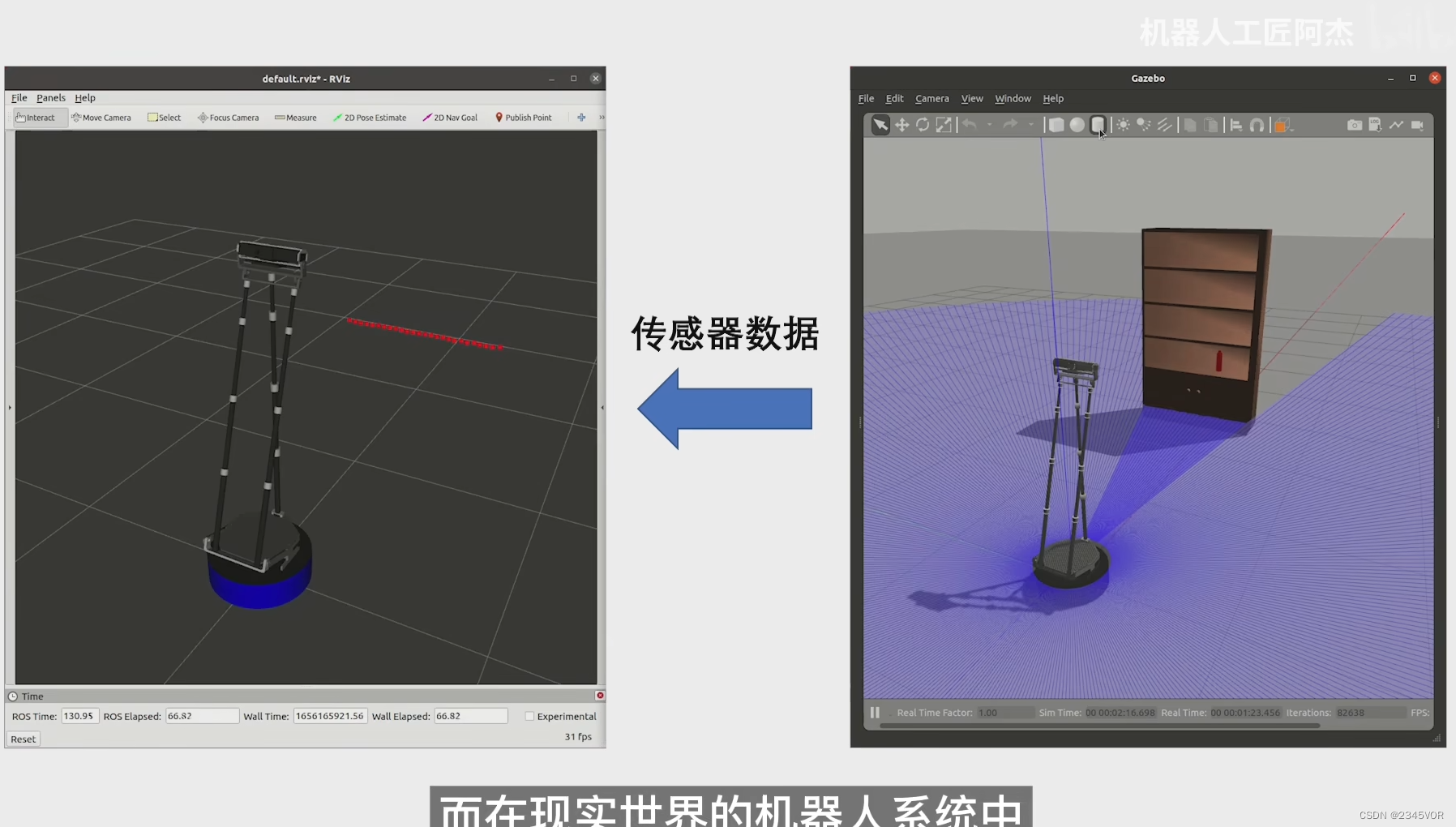
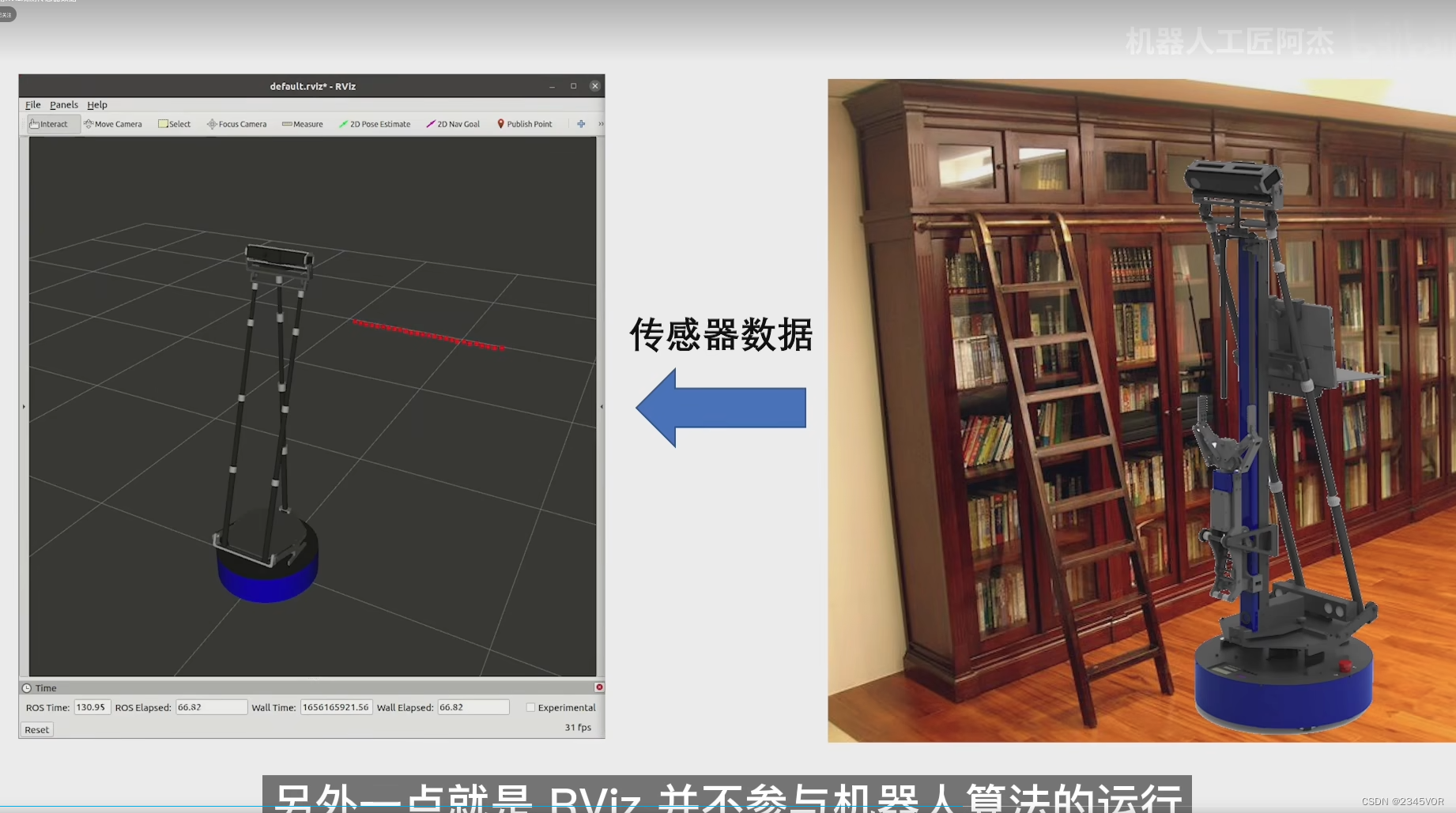 另外一点就是RViz并不参与机器人算法的运行,它只是一个为了方便人类进行观测的工具而已 即使没有RViz,也不影响机器人的ROS系统的运行 只有需要观察某些数据实时变化的时候,才会打开RViz 下面添加虚拟环境的圆柱体障碍物
另外一点就是RViz并不参与机器人算法的运行,它只是一个为了方便人类进行观测的工具而已 即使没有RViz,也不影响机器人的ROS系统的运行 只有需要观察某些数据实时变化的时候,才会打开RViz 下面添加虚拟环境的圆柱体障碍物 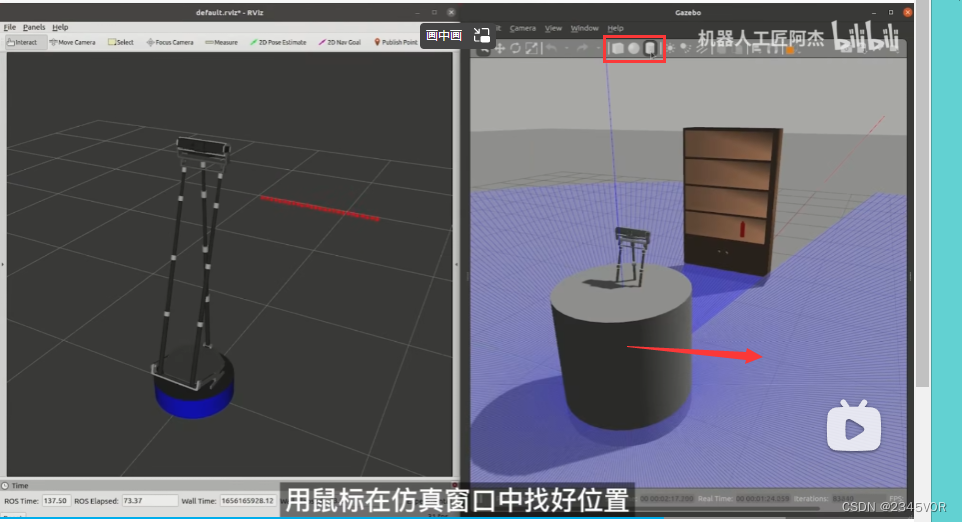
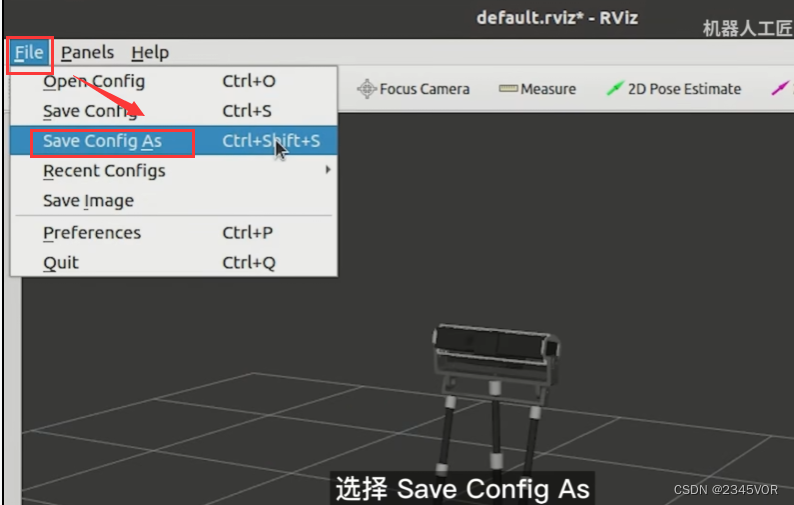 选择保存地址,方便后期直接加载
选择保存地址,方便后期直接加载 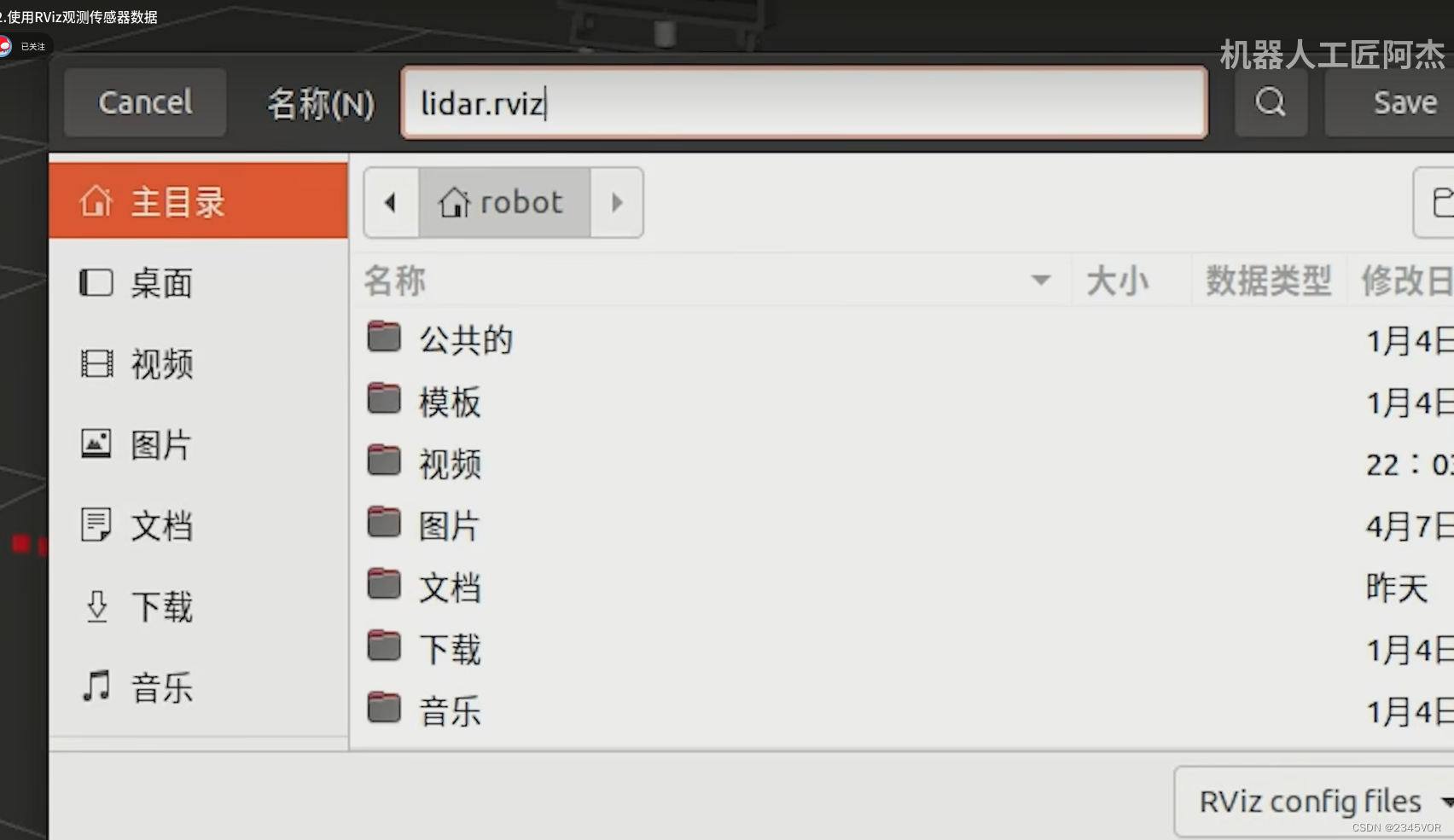 然后关闭所有终端 打开三个终端分别运行三条指令
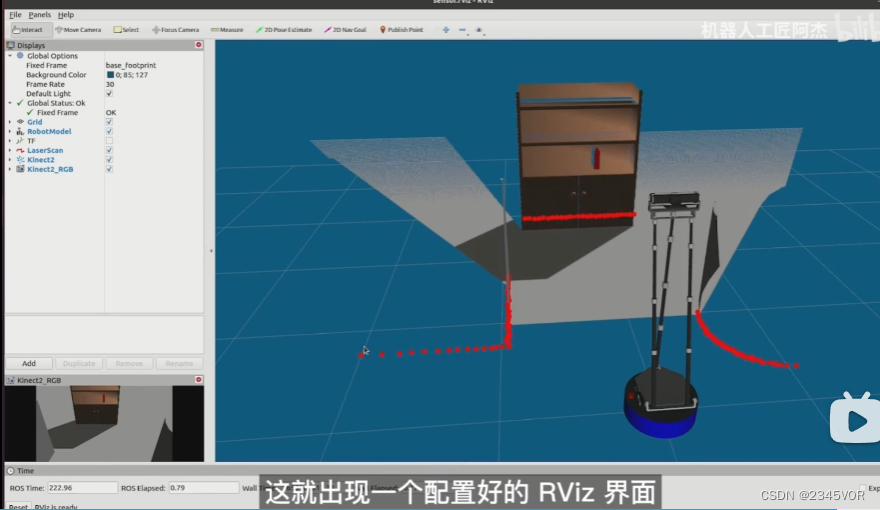
然后关闭所有终端 打开三个终端分别运行三条指令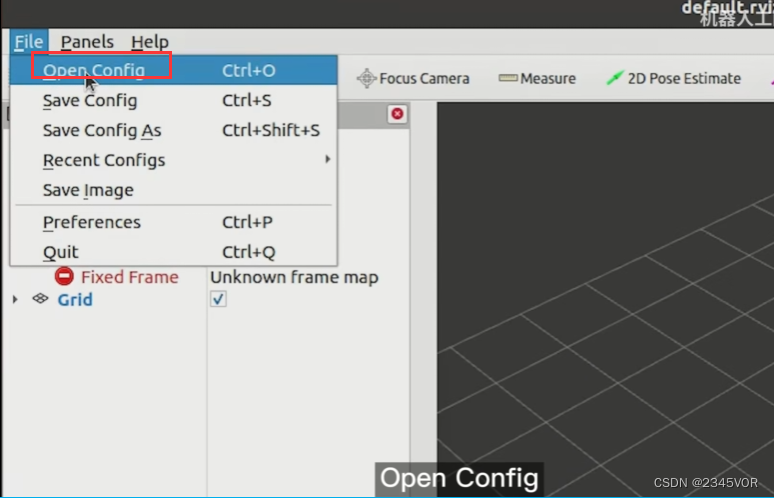 然后选择刚保存的位置
然后选择刚保存的位置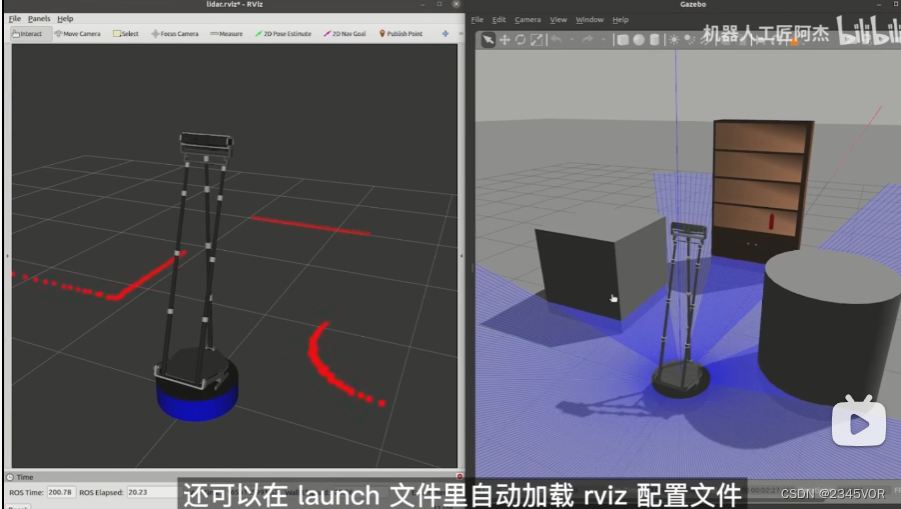
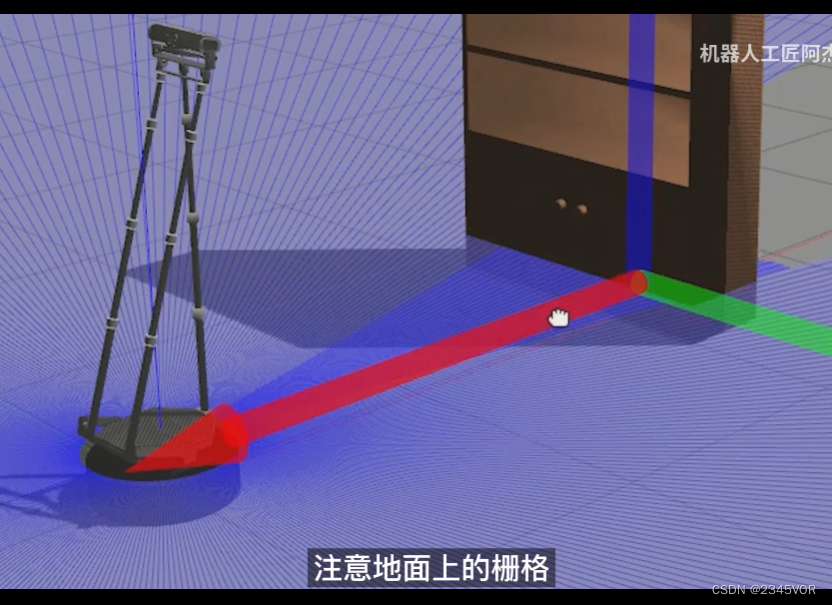
 关闭摄像头,保留激光雷达
关闭摄像头,保留激光雷达 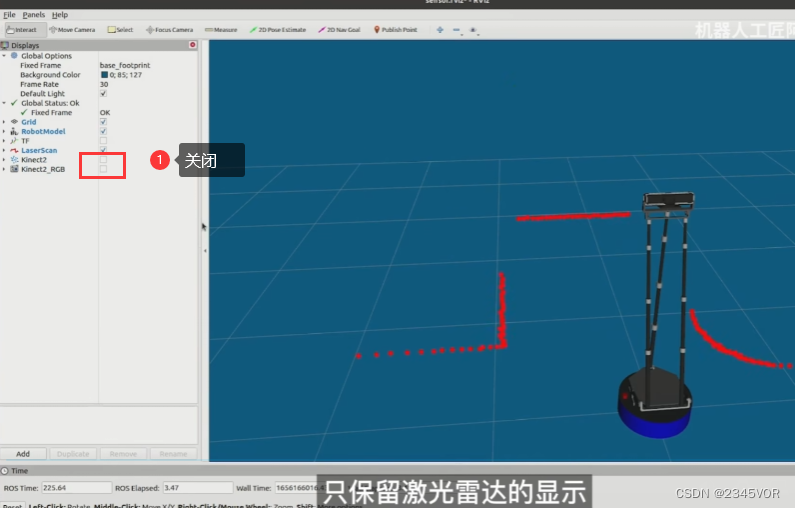 调整视角
调整视角 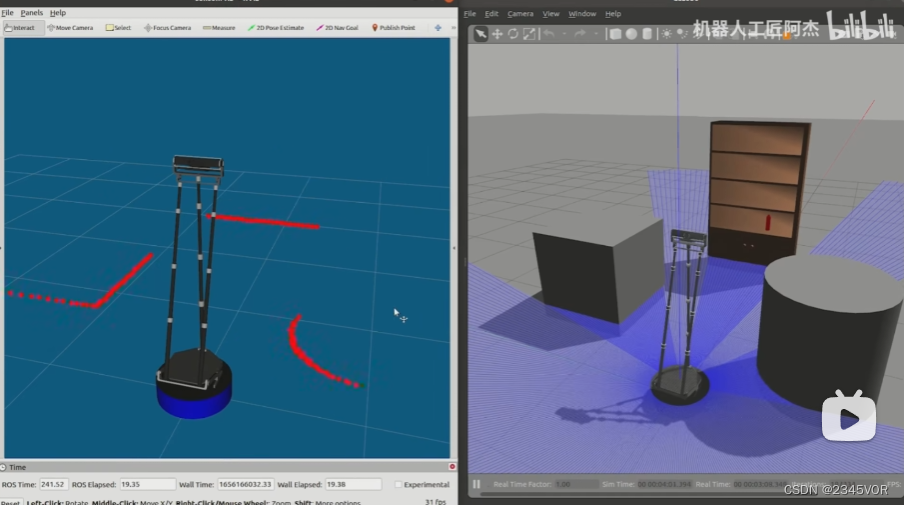
 进入website
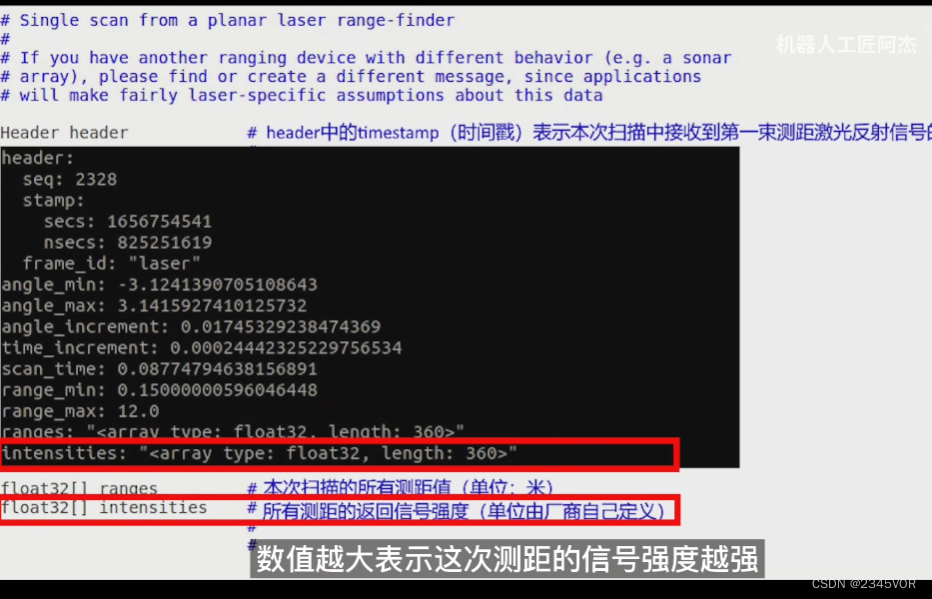
进入website 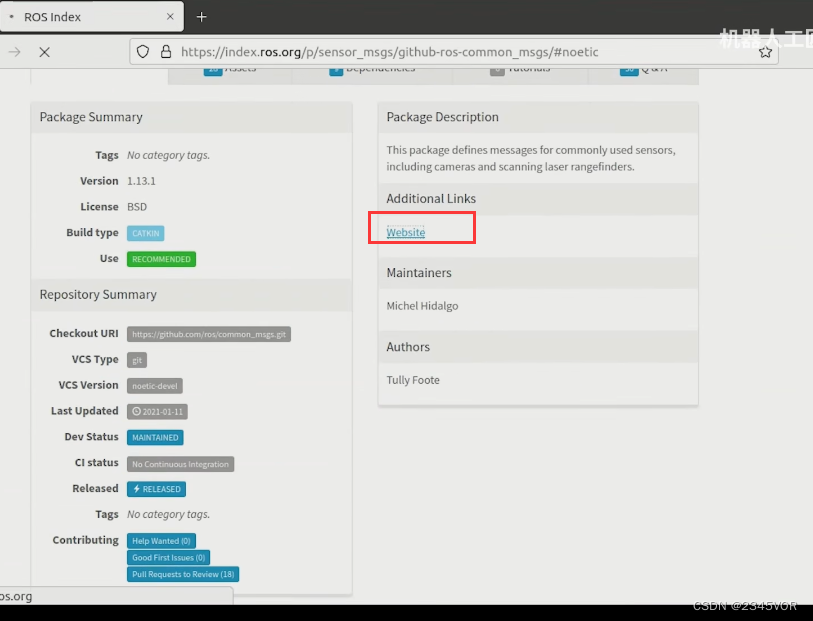 在消息中找到LaserScan
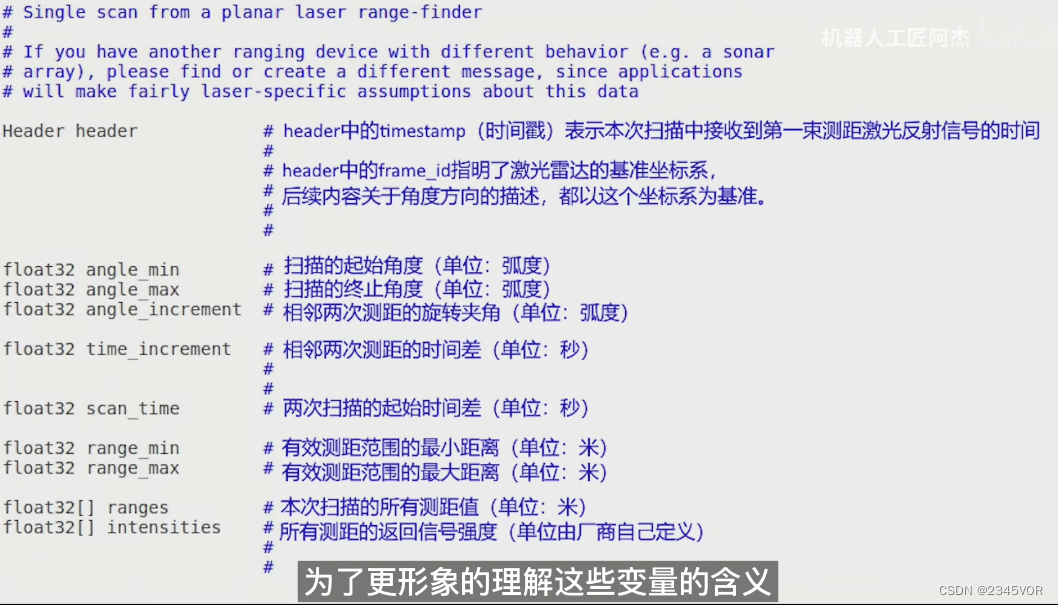
在消息中找到LaserScan  这就打开了激光雷达消息包的格式定义
这就打开了激光雷达消息包的格式定义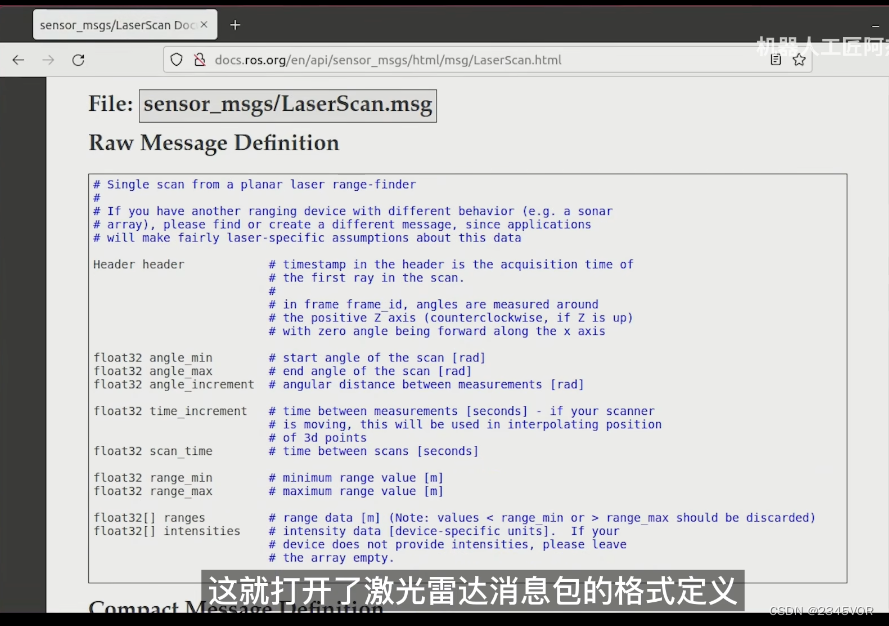
 显示对比
显示对比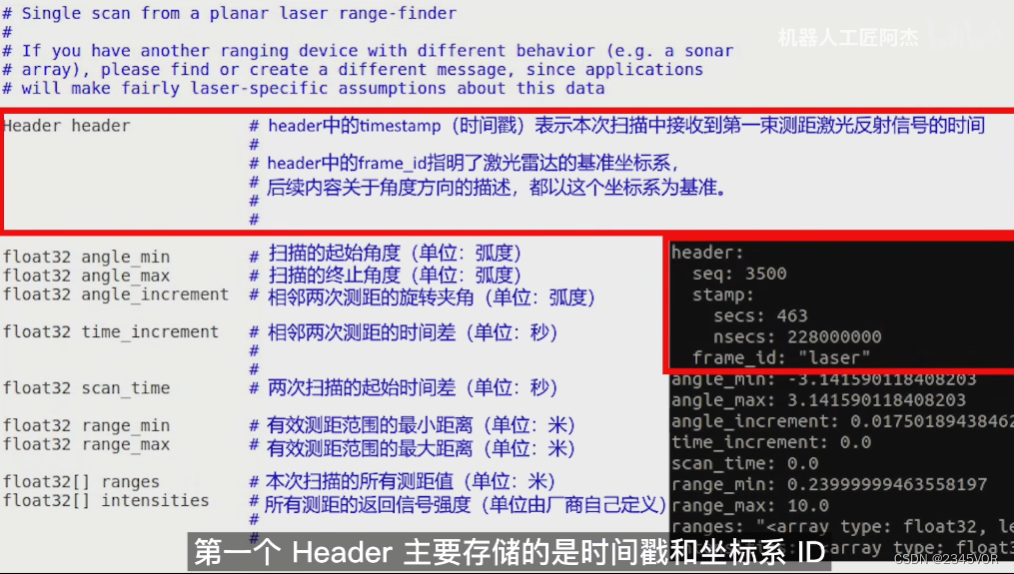
 实现步骤
实现步骤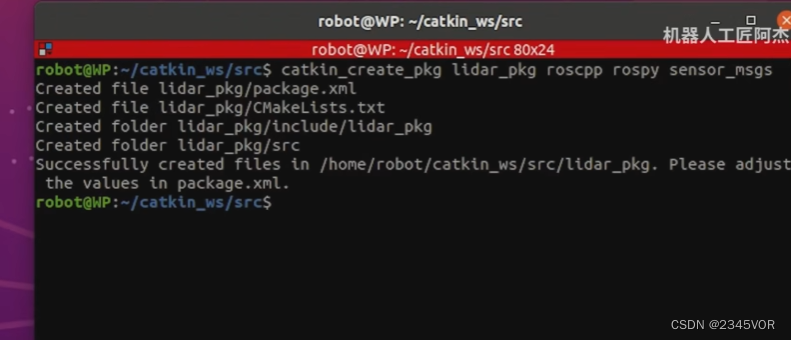 在lidar_pkg文件夹下src中创建lidar_node.cpp
在lidar_pkg文件夹下src中创建lidar_node.cpp 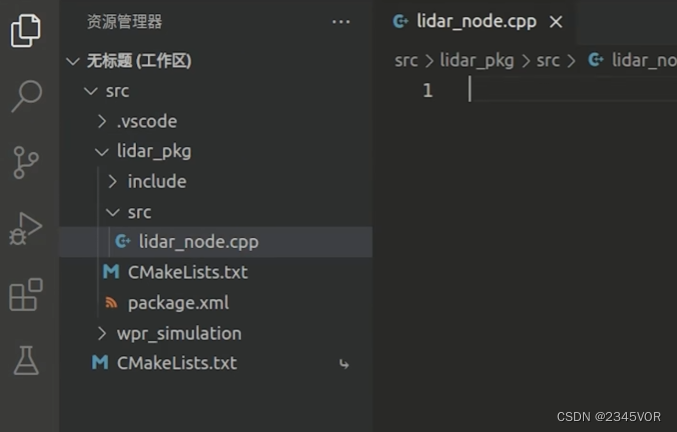
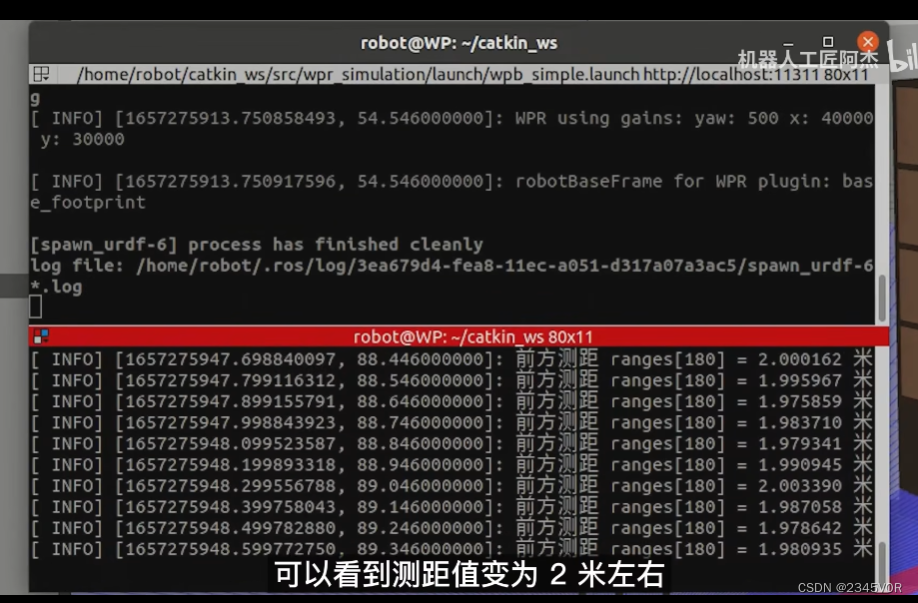
 ctrl+shift+b快捷编译
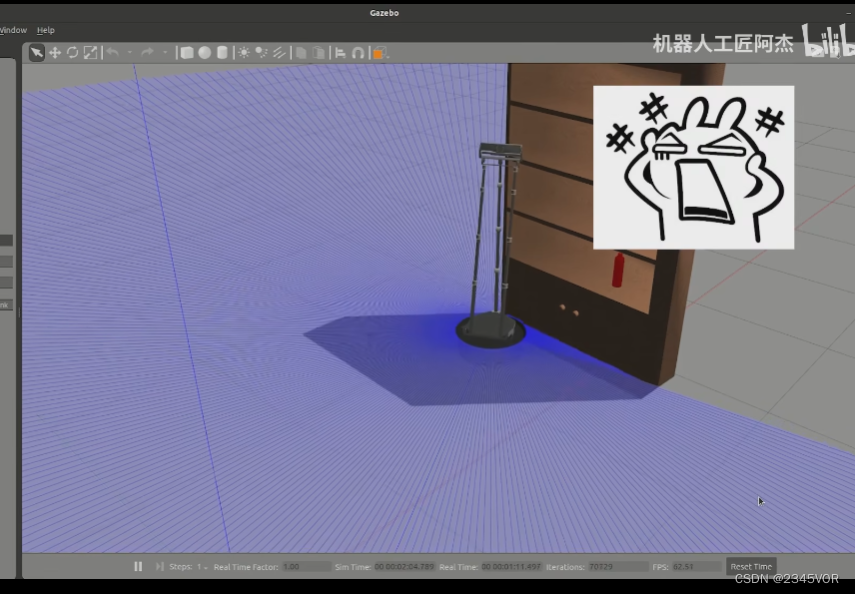
ctrl+shift+b快捷编译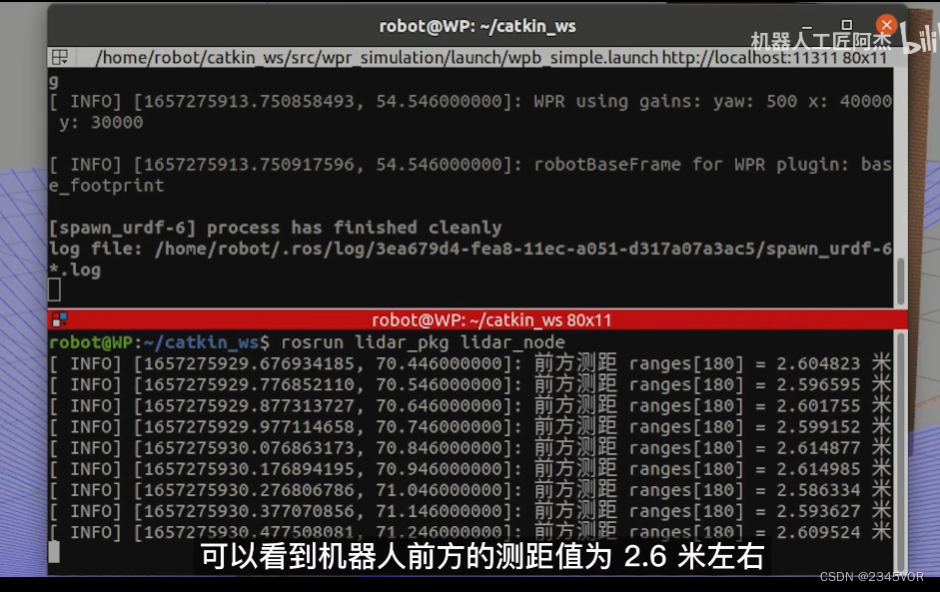 前方距离2.6m,然后在Gazebo中调整书柜,选择移动靠近机器人
前方距离2.6m,然后在Gazebo中调整书柜,选择移动靠近机器人 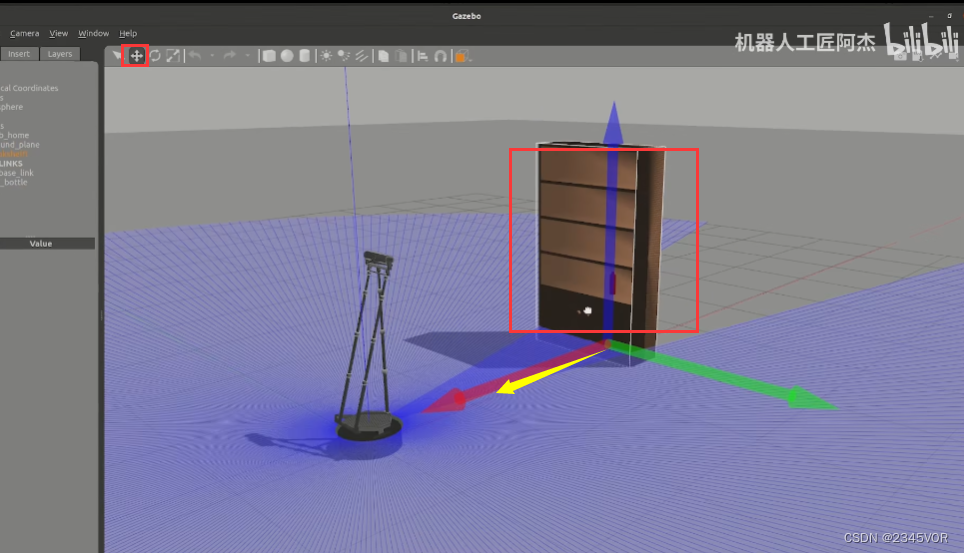
 可参照可以打开.wpr_simulation里的demo_lidar_data.cpp文件
可参照可以打开.wpr_simulation里的demo_lidar_data.cpp文件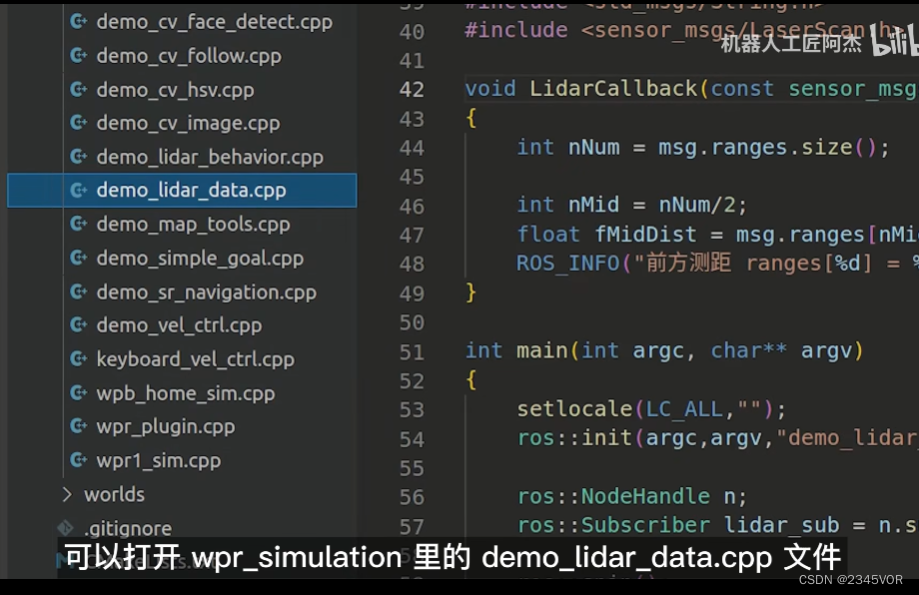
 机器人撞到障碍物,机器人有宽度
机器人撞到障碍物,机器人有宽度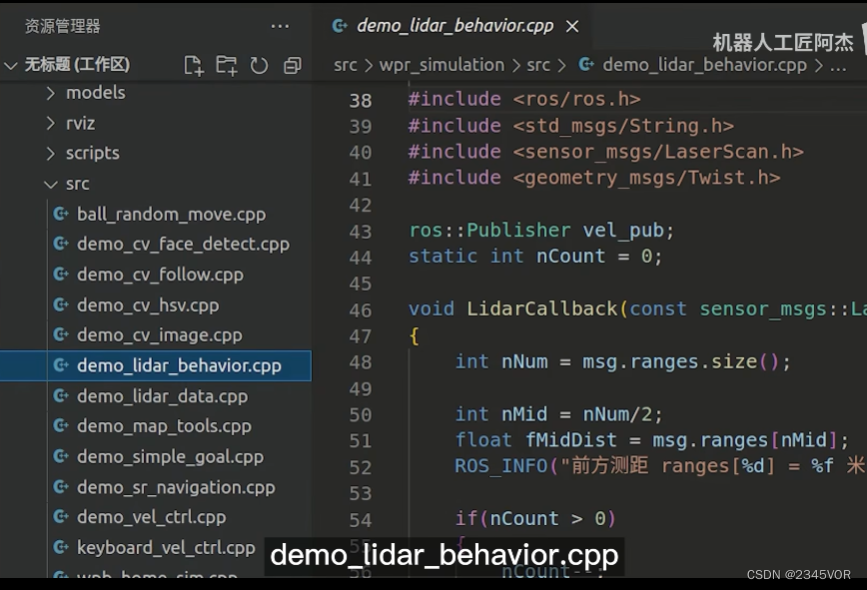
【本文地址】