| Gazebo模拟激光雷达进行距离和强度数据收集range+intensity,反光板导航 | 您所在的位置:网站首页 › 激光雷达数据格式怎么设置 › Gazebo模拟激光雷达进行距离和强度数据收集range+intensity,反光板导航 |
Gazebo模拟激光雷达进行距离和强度数据收集range+intensity,反光板导航
|
为一些物体设置一个高值可以使模拟的2D激光雷达扫描仪输出包含反射器存在的角度的高强度数据成为可能。这行得通吗? 我想在gazebo中模拟激光雷达并进行rosbag的录制,但是网上的教程基本都是对range进行设置和记录,而无法收取物体的反射强度,这里给出如何设置物体的光反射强度。所用环境为ubuntu 18.04, ros melodic gazebo 9.0 无法获得强度模拟,需要更新到11 ,链接为https://blog.csdn.net/weixin_44623637/article/details/109249607激光雷达配置文件laser.xacro为 0 0 0 0 0 0 true 10 1000 1 -3 3 0.10 30.0 0.01 gaussian 0.0 0.01 /scan laser 重点是世界中物体反射强度的设置 (1)我建立的环境如下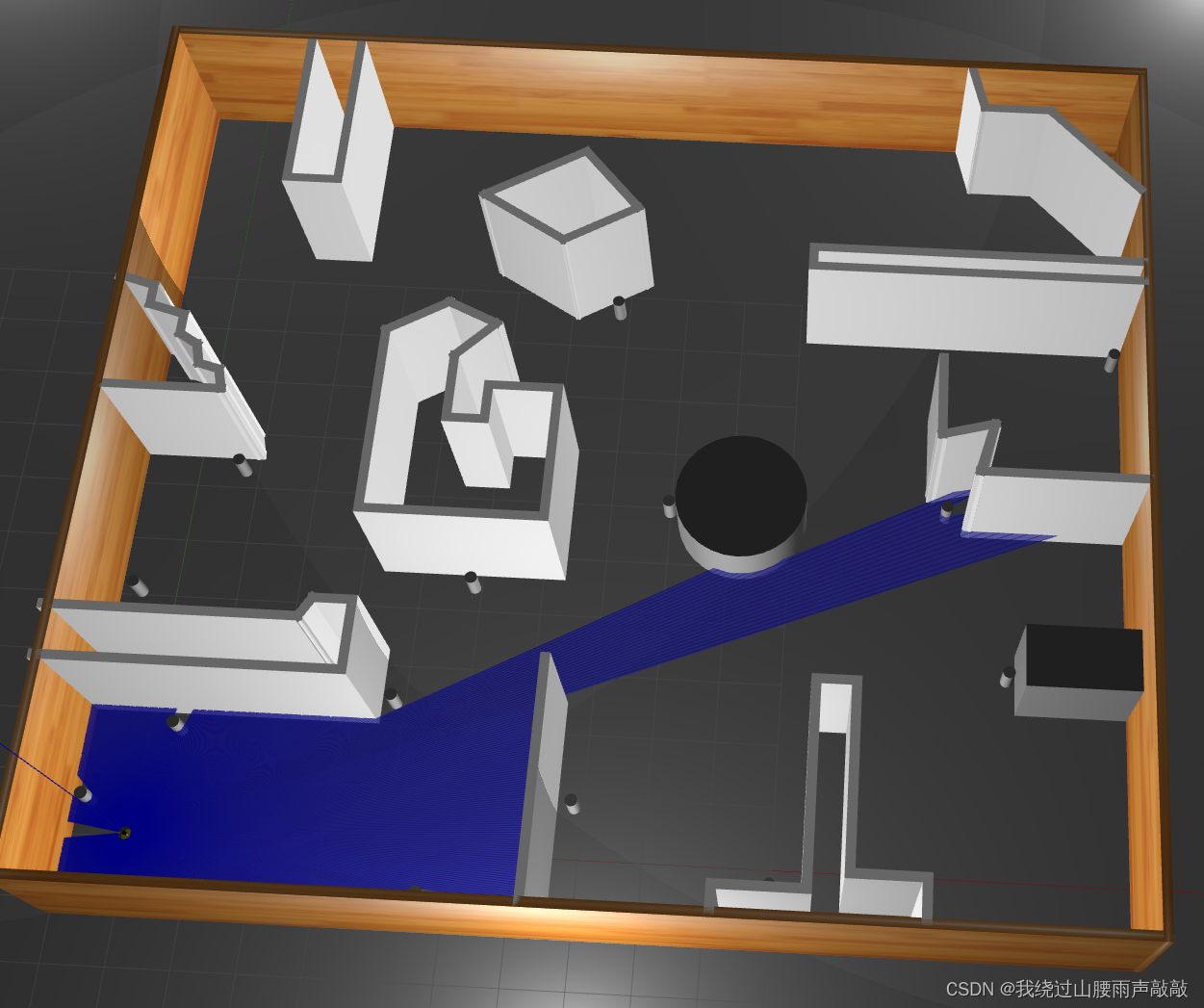 选中物体在左侧栏中可看到属性laser_retro的值,默认为0 选中物体在左侧栏中可看到属性laser_retro的值,默认为0 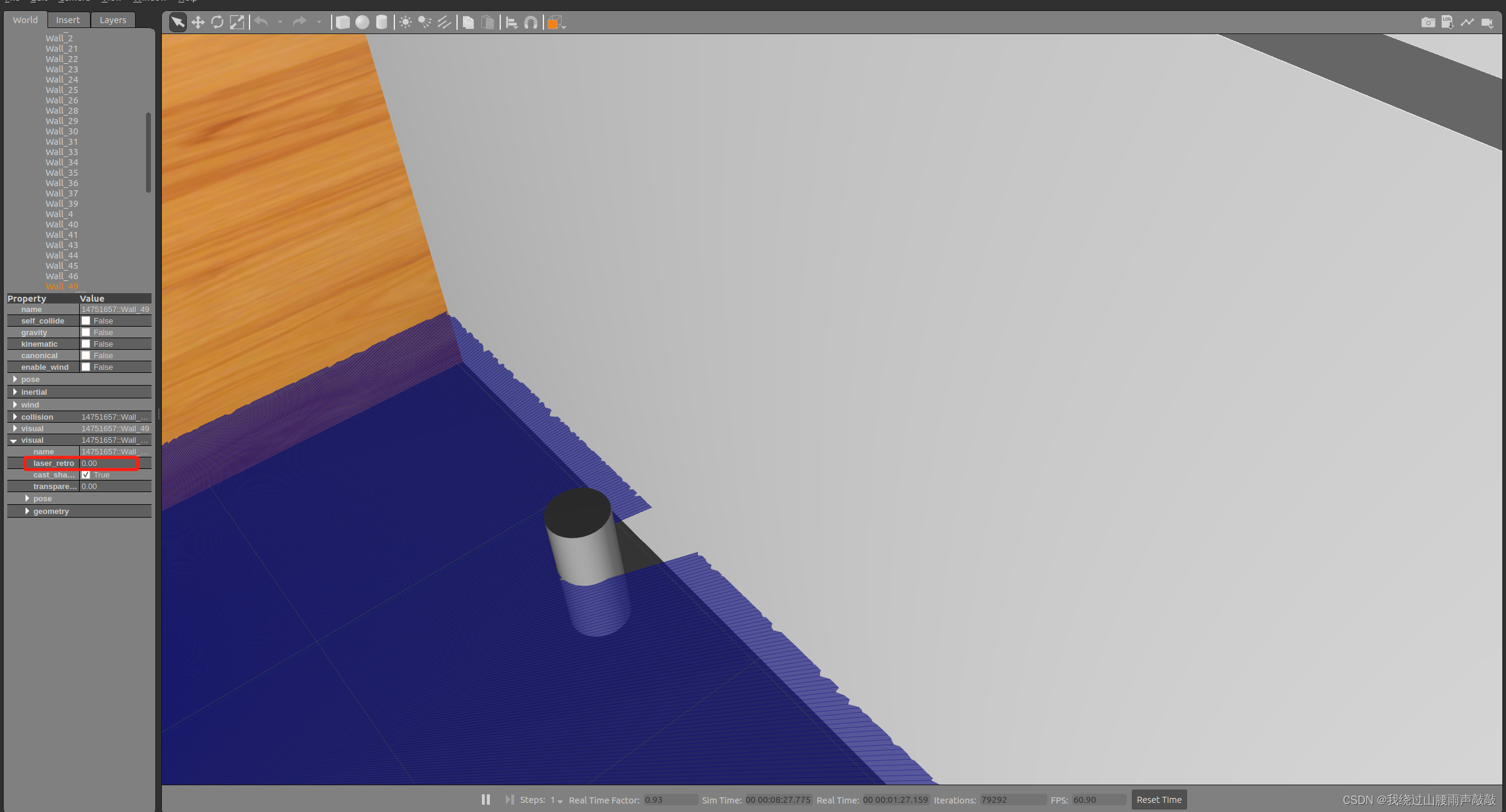 (2)设置环境中的物体的反射强度值,以环境中的圆柱(用作反光板)为例,gazebo中选中物体,查看名称,到对应的.world文件(由gazebo建立环境后存储)下找到对应描述。当然需要首先edit model来建立一个形状,这里我讲这个model命名为reflector,其实就是圆柱修改了半径和高度尺寸。 (2)设置环境中的物体的反射强度值,以环境中的圆柱(用作反光板)为例,gazebo中选中物体,查看名称,到对应的.world文件(由gazebo建立环境后存储)下找到对应描述。当然需要首先edit model来建立一个形状,这里我讲这个model命名为reflector,其实就是圆柱修改了半径和高度尺寸。 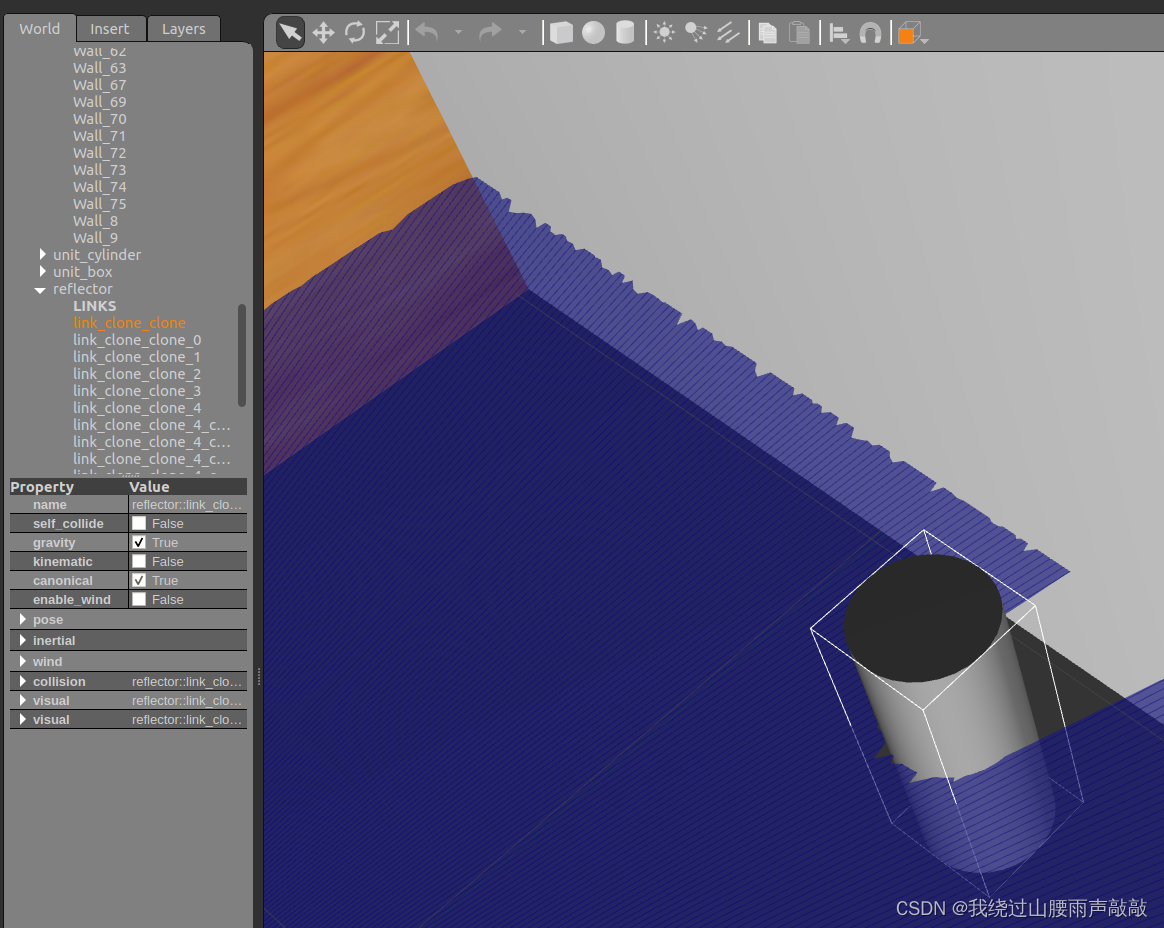 上图中反光板名称为link_clone_clone,因此在.world描述文件中可找到相关段落:
1
0.145833
0
0
0.145833
0
0.125
0 0 0 0 -0 0
0
0
0
-3.29191 0.432873 -0 0 -0 0
1
255.0 // 添加语句
0.1
0.5
Gazebo/Grey
file://media/materials/scripts/gazebo.material
__default__
0.3 0.3 0.3 1
0.7 0.7 0.7 1
0.01 0.01 0.01 1
0 0 0 1
0 0 0 0 -0 0
0
1
255.0 // 添加语句
10
0 0 0 0 -0 0
0.1
0.5
1
1
0 0 0
0
0
1
0
0
1
0
0
1e+06
0
1
1
0
0.2
1e+13
1
0.01
0
1
-0.01
0
0.2
1e+13
1 上图中反光板名称为link_clone_clone,因此在.world描述文件中可找到相关段落:
1
0.145833
0
0
0.145833
0
0.125
0 0 0 0 -0 0
0
0
0
-3.29191 0.432873 -0 0 -0 0
1
255.0 // 添加语句
0.1
0.5
Gazebo/Grey
file://media/materials/scripts/gazebo.material
__default__
0.3 0.3 0.3 1
0.7 0.7 0.7 1
0.01 0.01 0.01 1
0 0 0 1
0 0 0 0 -0 0
0
1
255.0 // 添加语句
10
0 0 0 0 -0 0
0.1
0.5
1
1
0 0 0
0
0
1
0
0
1
0
0
1e+06
0
1
1
0
0.2
1e+13
1
0.01
0
1
-0.01
0
0.2
1e+13
1
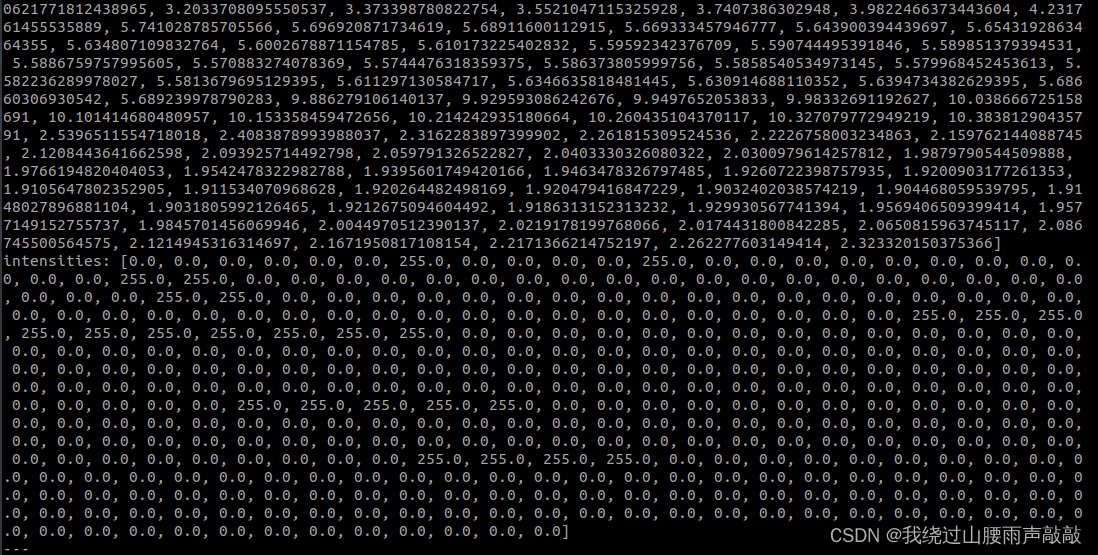
在上述部分添加相关语句,格式为255.0。 然后即可rostopic echo /scan 看到收到的range和强度数据。 |
【本文地址】
公司简介
联系我们