| ROS:bag数据包内容提取 | 您所在的位置:网站首页 › 激光雷达rosbag数据读取 › ROS:bag数据包内容提取 |
ROS:bag数据包内容提取
|
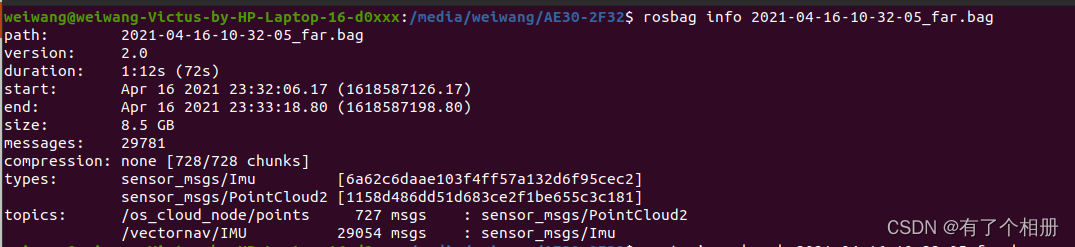
通常在利用ros采集传感器数据时,我们会得到一个包含多个传感器数据的bag数据包,下面将会介绍从bag数据包提取雷达点云数据和imu数据的方法。 系统版本:Ubuntu20.04 ROS版本:Noetic 先觉条件: 查看bag数据包中雷达点云数据和imu数据所对应的topic名称,通过下面这条指令实现。 rosbag info #指bag数据包的名称例如: rosbag info 2021-04-16-10-32-05_far.bag下图为具体的实现过程:
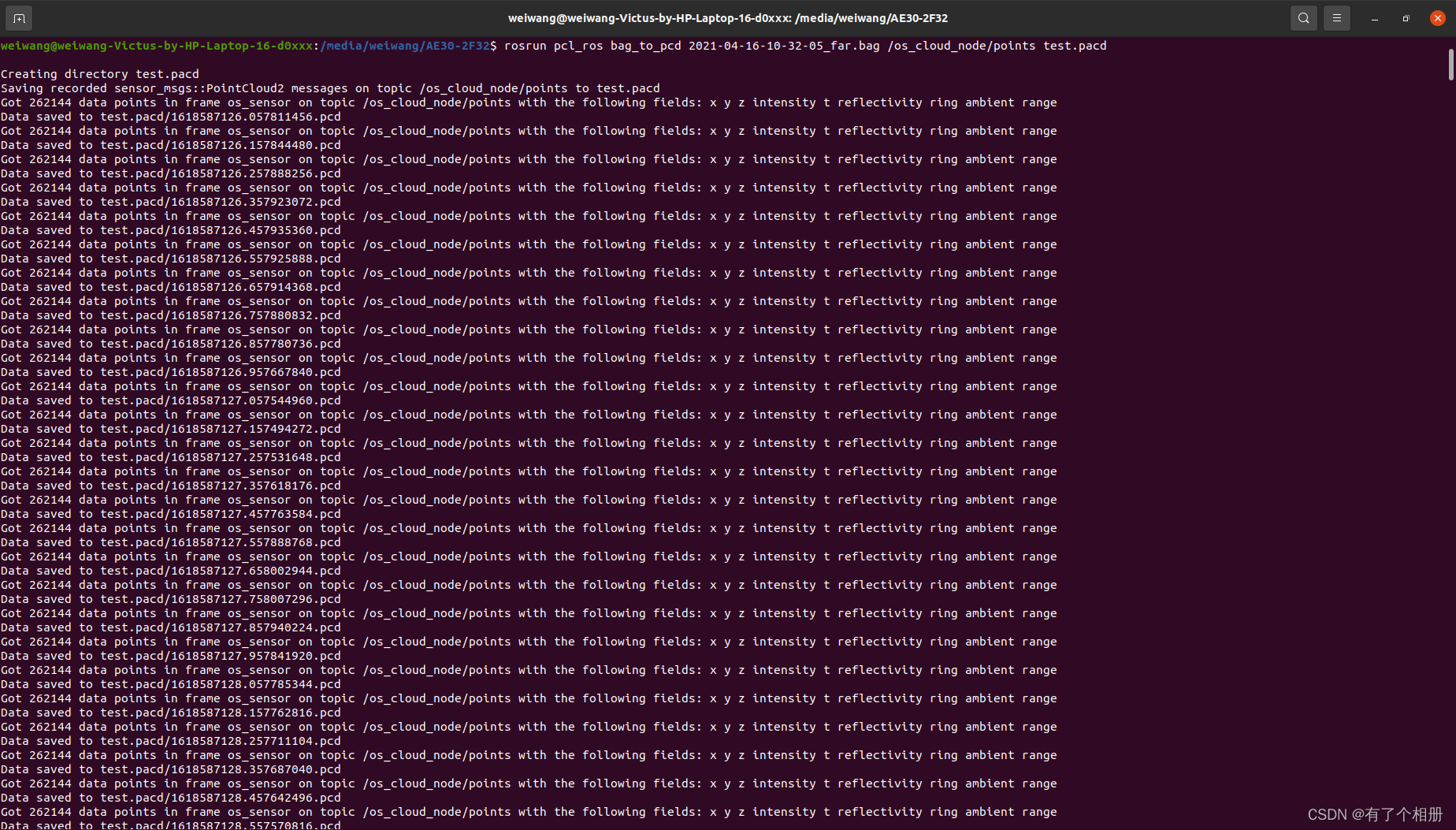
1、提取雷达点云数据 启动roscore,打开终端,输入下面这条指令实现 roscore从bag数据包中提取雷达点云数据,并将雷达点云数据转换为pcd格式,通过下面这条命令实现。 rosrun pcl_ros bag_to_pcd # 指读取的bag数据包的名字 # 指bag数据包雷达点云数据对应的topic名称 # 指输出过程中所创建的目录名称,得到的pcd格式的雷达点云数据放在此目录下例如: rosrun pcl_ros bag_to_pcd 2021-04-16-10-32-05_far.bag /os_cloud_node/points test.pacd下图为具体的实现过程:
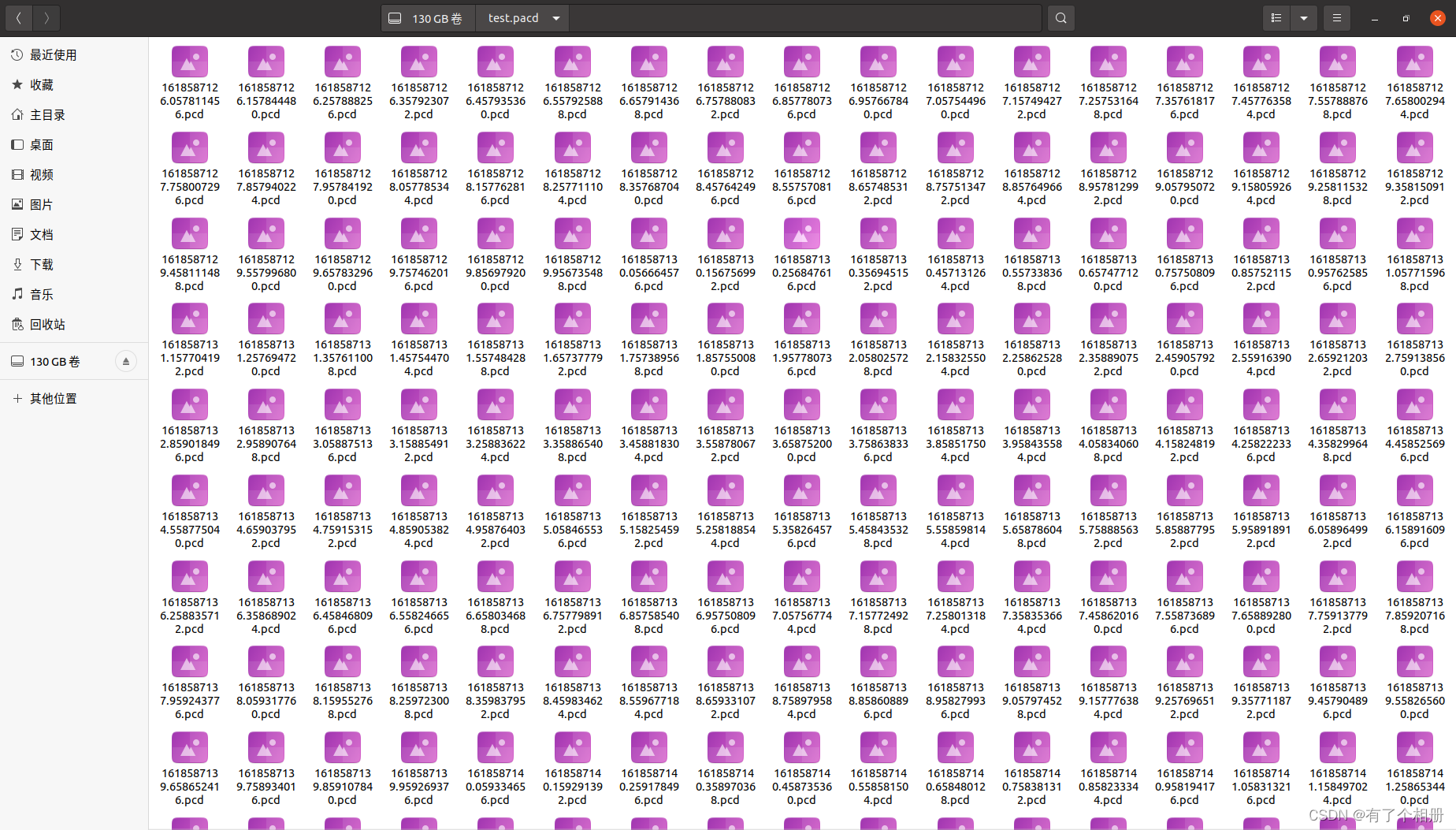
然后会得到按照时间戳排序的雷达点云数据。
2、提取imu数据 从bag数据包中提取imu数据,可将其转化为txt格式后者csv格式,通过下面的指令实现。 rostopic echo -b -p > xxxxxx.txt 或者 rostopic echo -b -p > xxxxx.csv # 指读取的bag数据包的名字 # 指bag数据包imu数据对应的topic名称 # xxxxxx.txt xxxxxx.csv中xxxxxx指自己给得到的文件取的名字例如: rostopic echo -b 2021-04-16-10-32-05_far.bag -p /vectornav/IMU > imu.csv需注意:读取成功后,终端不会给出提示
但实际上已生成所要的文件
得到imu.csv的文件内容:
|

【本文地址】
公司简介
联系我们