| 激光雷达(LiDAR)点云数据知多少? | 您所在的位置:网站首页 › 激光是怎么产生的三个条件 › 激光雷达(LiDAR)点云数据知多少? |
激光雷达(LiDAR)点云数据知多少?
|
点击上方“小白学视觉”,选择加"星标"或“置顶” 重磅干货,第一时间送达本文转自 | 新机器视觉
作为一位测绘小白 当看到眼前这些密密麻麻的点 是否让你感到眼前一黑呢? 你能获取哪些有用的测绘信息呢?
我们都知道“一沙一世界,一叶一菩提”,但不一定知道的是,还有“一点一方位空间”。 这些点可大有来头,用处可大了! 且听笔者详细道来吧~ 原来,这些都是激光雷达(LiDAR)点云数据,每一个点都包含了三维坐标信息,也是我们常说的X、Y、Z三个元素,有时还包含颜色信息、反射强度信息、回波次数信息等。
▲点云信息查询 首先,让我们了解一下它们是如何产生的。 其实,这些点是机载激光雷达向地面发射激光信号,然后收集地面反射的激光信号而来的。此后,内业通过联合解算、偏差校正,便可以计算出这些点的准确空间信息。看上去一个简单的数据获取,其实包含了较为复杂的设备结构及数据采集过程。
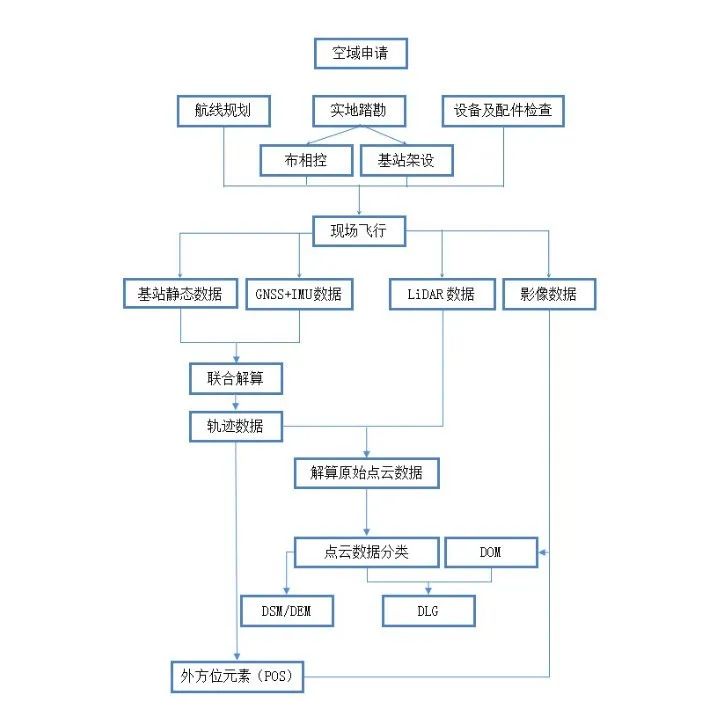
▲机载激光雷达数据获取 其一,激光雷达(LiDAR)包括了激光测距系统、光学机械扫描单元、控制记录单元、全球定位系统(Global Position System, GPS)、惯性测量系统(Inertial Measurement Unit,IMU)以及一套成像设备等。其二,机载激光雷达(LiDAR)进行采集点云数据时除了天气需要满足飞行条件外,还需要获得空域许可,提前设计航线,实地勘察。
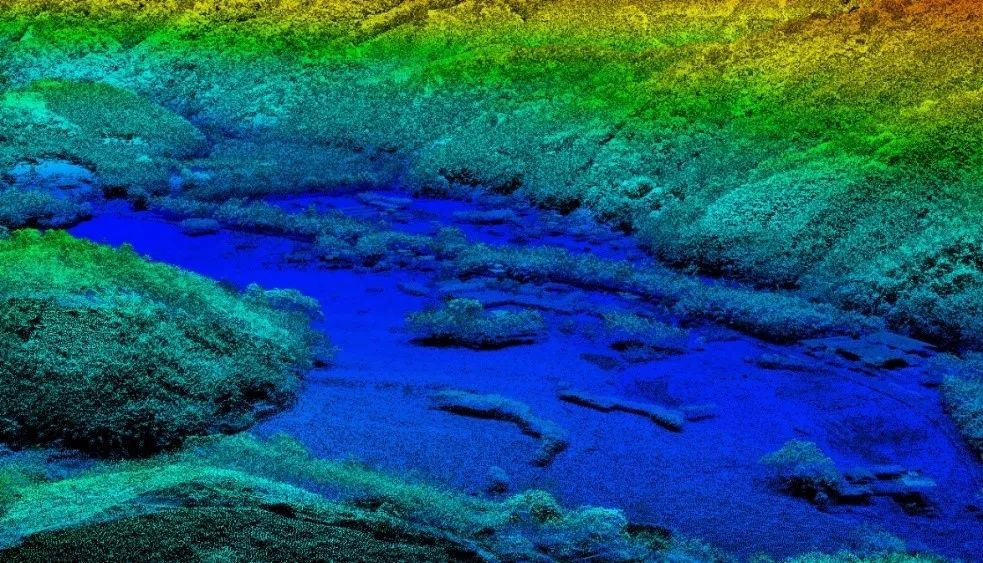
▲点云数据获取及解算过程 我们在上文所见的那些离散点无法获取有用信息,是因为打开的方式不对。 正确的打开方式是这样的:
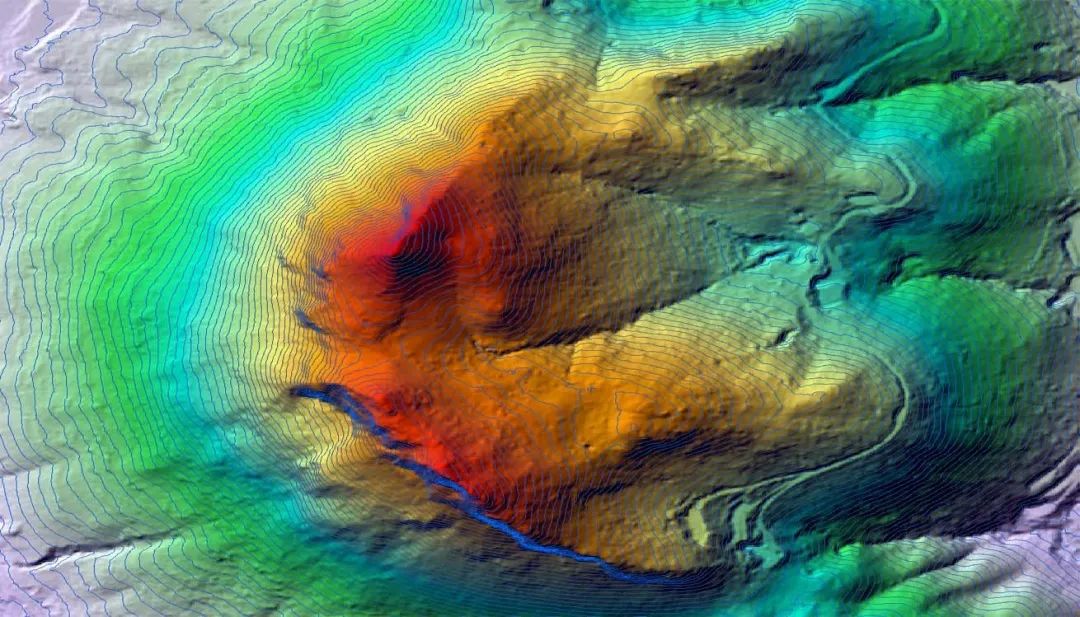
▲点云三维预览 三维预览,只是点云最基本的表面特征,因为每一个点云都具备空间坐标信息,因此它们都具备测量能力。两点成线,三点成面,四点成体,通过这些点,不仅可以明确了解地表空间上的某个点的坐标信息,还可以计算它们之间的长度、面积、体积、角度等信息,正好应对了测量需要的要素。 那点云数据可以用来干什么? 1 可用于制作数字高程模型 通过对点云数据进行自动化预处理,地面滤波,结合人工编辑对激光点云进行进一步的精分类,保留地面点,剩余的地面点通过构建不规则三角网(TIN)等模型进行栅格化,可得到高精度的数字高程模型(DEM)数据,也可以转换为等高线数据。
▲数字高程模型及等高线
2 可用于三维建模 随着激光雷达技术的逐步成熟,三维激光雷达技术制作的三维模型精度高,适用范围广,外业工作量少,省时省力。在建筑物的房屋轮廓提取、特征点检测和三维重建工作上发挥了重要作用。且结合倾斜摄影技术,地物提取更加便捷,数据可视化程度更高。
▲点云三维模型
3 可用于农林普查 机载激光点云可以用于普查林木的特征,例如树木的平均高度,树冠密度,生物量,林木储量和植被覆盖度。如果搭配高光谱成像仪,可以确定更多的信息,如植被分类、植被储量、土壤变化等。其次,衍生数据可用于监测森林生长,风暴或火灾造成的损害等。
▲林木整体分布展示
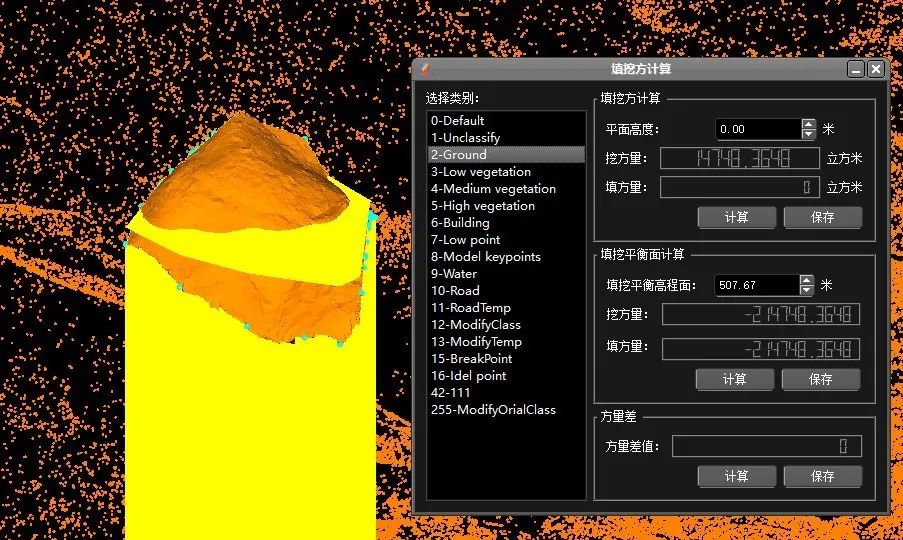
4 可用于土方计算 高精度激光点云,可用于构建地形三维模型,为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,大大减少工程勘察设计中的外业工作量,缩短工作周期。
▲点云计算土方量
5 可用于监测地质灾害 通过地形三维模型的建立,可以大面积监测地形的变化,可以根据地形的变化方向及地形的变化量,作出风险评估,为预防地质灾害的发生提供依据。例如,对滑坡体地表的监测,特别是在陡坡下的道路、铁轨,以及削坡建房等容易发生滑坡地区,能够为滑坡体成因和发育趋势的推断提供重要依据。
▲削坡建房
上述五个方面,只是点云数据应用的其中一部分。 因为激光雷达具备着以下几个特点: 全天候工作,主动获取数据; 隐蔽性好,抗有源干扰能力强,且获取数据范围广; 激光穿透能力强; 外业工作量小; 点云精度高,空间坐标信息准确。 所以,激光雷达(LiDAR)获取的点云数据,往往也适用资源勘探、城市规划、农业开发、水利工程、环境监测、矿山测量、隧道测量、公路道路测量、电缆监测、海洋深水测量等各个方面。 今天的激光雷达(LiDAR)点云数据就介绍到这里啦,你有没有get到呢? 文 | 陈洪斌 转载 | 广东省国土资源测绘院
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。 下载1:OpenCV-Contrib扩展模块中文版教程 在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。 下载2:Python视觉实战项目52讲 在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。 下载3:OpenCV实战项目20讲 在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。 交流群 欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
|








 End
End 

【本文地址】