|
这里写目录标题
💥1. 主要功能:💥2. 讲解视频:💥3. 仿真💥4. 程序代码💥5. 设计报告💥6. 设计资料内容清单&&下载链接💥[网盘链接:](https://docs.qq.com/doc/DS2RGaVBRcHhId3Bk)
51单片机水位监测控制报警仿真设计
( proteus仿真+程序+设计报告+讲解视频)
仿真图proteus7.8及以上
程序编译器:keil 4/keil 5
编程语言:C语言
设计编号:S0064
💥1. 主要功能:
基于51单片机AT89C51/52(与AT89S51/52、AT89C51/52、STC89C51/52等51内核单片机通用)
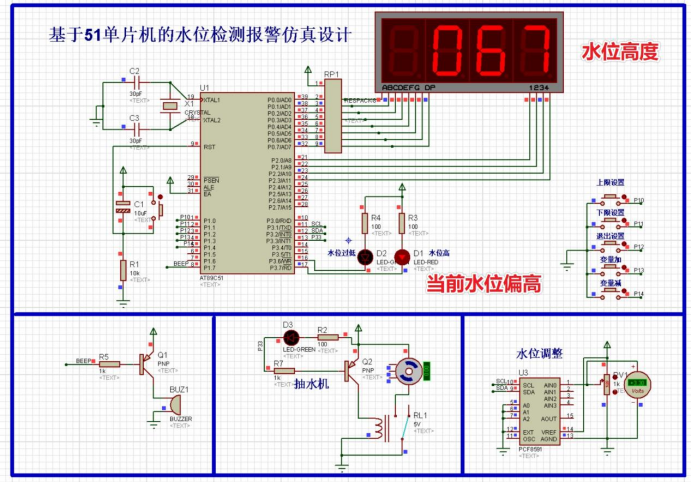
基于51单片机水位监测控制报警仿真设计
1、监测并通过数码管显示当前水位;
2、利用电机模拟水泵,具有蜂鸣器,显示灯等装置;
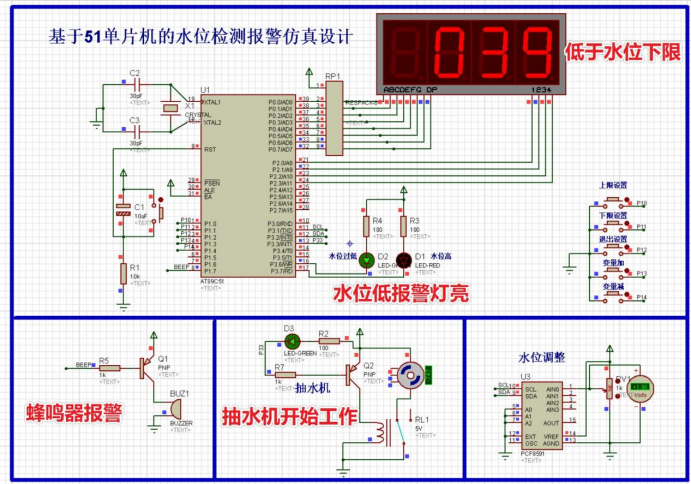
3、带有水位上下限设置功能,低于水位下限加水,高于上限停止加水;
4、当前水位高于水位上限蜂鸣器报警,并抽水,水泵抽水时显示灯亮,抽到水位上限时则停止抽水;
需注意仿真中51单片机芯片是兼容的,AT89C51,AT89C52是51单片机的具体型号,内核是一样的。相同的原理图里,无论stc还是at都一样,引脚功能都是一样的,程序是兼容的,芯片可以替换为STC89C52/STC89C51/AT89C52/AT89C51等51单片机芯片。
💥2. 讲解视频:
讲解视频包含仿真运行讲解和代码讲解
💥3. 仿真
打开仿真工程,双击proteus中的单片机,选择hex文件路径,然后开始仿真。开始仿真后,数码管显示水位,如果水位偏高,偏高指示灯亮红色
当前水位高于水位上限蜂鸣器报警,并抽水,水泵抽水时显示灯亮,抽到水位上限时则停止抽水;
💥4. 程序代码
使用keil4或者keil5编译,代码有注释,可以结合报告理解代码含义。
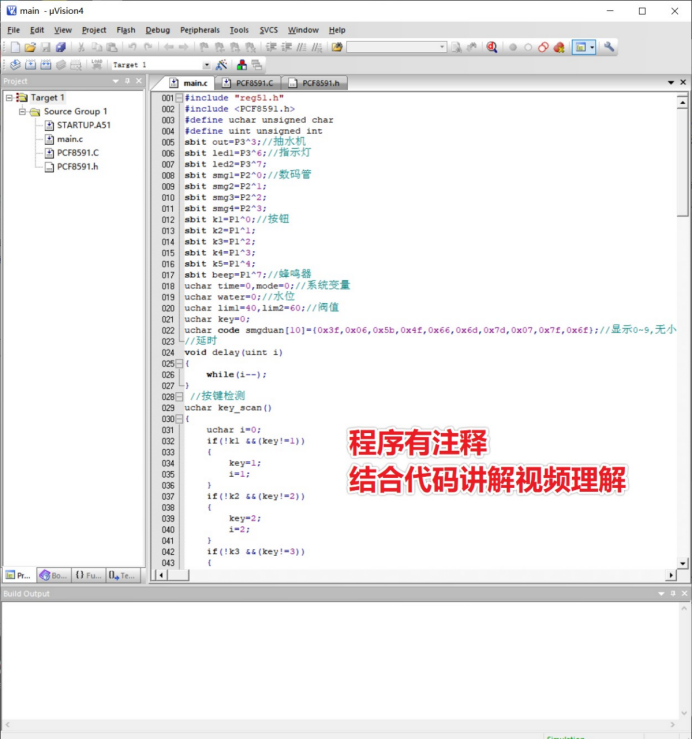 main.c main.c
#include "reg51.h"
#include
#define uchar unsigned char
#define uint unsigned int
sbit out=P3^3;//抽水机
sbit led1=P3^6;//指示灯
sbit led2=P3^7;
sbit smg1=P2^0;//数码管
sbit smg2=P2^1;
sbit smg3=P2^2;
sbit smg4=P2^3;
sbit k1=P1^0;//按钮
sbit k2=P1^1;
sbit k3=P1^2;
sbit k4=P1^3;
sbit k5=P1^4;
sbit beep=P1^7;//蜂鸣器
uchar time=0,mode=0;//系统变量
uchar water=0;//水位
uchar lim1=40,lim2=60;//阀值
uchar key=0;
uchar code smgduan[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//显示0~9,无小数点
//延时
部分函数,工程文件压缩包解压后即可获取
void delay(uint i)
{
while(i--);
}
//按键检测
uchar key_scan()
{
uchar i=0;
if(!k1 &&(key!=1))
{
key=1;
i=1;
}
if(!k2 &&(key!=2))
{
key=2;
i=2;
}
if(!k3 &&(key!=3))
{
key=3;
i=3;
}
if(!k4 &&(key!=4))
{
key=4;
i=4;
}
if(!k5 &&(key!=5))
{
key=5;
i=5;
}
if(k1 && k2 && k3 && k4 && k5 )
key=0;
return i;
}
//主函数
void main()
{
uchar i=0,k=0;
TMOD|=0X01;
TH0=0X3C;
TL0=0XB0;
ET0=1;//打开定时器0中断允许
EA=1;//打开总中断
TR0=1;//打开定时器
while(1)
{
i=key_scan();//按键检测
//设置按钮
if(i==2)
{
mode=1;
}
if(i==1)
{
mode=2;
}
if(mode==1)//设置下限
{
if(i==4)
{
if(lim1
if(i==4)
{
if(lim2
mode=0;
}
//点亮LED
if(water
led1=1;led2=0;
}
else
{
led1=1;led2=1;
}
//显示水位
if(mode==0)
{
P0=smgduan[water/100]; smg2=0;delay(100);smg2=1;
P0=smgduan[water%100/10]; smg3=0;delay(100);smg3=1;
P0=smgduan[water%10]; smg4=0;delay(100);smg4=1;
}
//显示下限
if(mode==1)
{
P0=0x38; smg1=0;delay(100);smg1=1;
P0=smgduan[lim1/100]; smg2=0;delay(100);smg2=1;
P0=smgduan[lim1%100/10]; smg3=0;delay(100);smg3=1;
P0=smgduan[lim1%10]; smg4=0;delay(100);smg4=1;
}
//显示上限
if(mode==2)
{
P0=0x76; smg1=0;delay(100);smg1=1;
P0=smgduan[lim2/100]; smg2=0;delay(100);smg2=1;
P0=smgduan[lim2%100/10]; smg3=0;delay(100);smg3=1;
P0=smgduan[lim2%10]; smg4=0;delay(100);smg4=1;
}
}
}
//定时器中断
void Timer0() interrupt 1
{
if(time
if(water |