| 限速之令牌桶理解 | 您所在的位置:网站首页 › 流量限速搞笑图 › 限速之令牌桶理解 |
限速之令牌桶理解
|
背景
为什么要限速?
限速的目的是防止有人恶意占用带宽,在保证用户正常业务前提下,保证整个网络不发生拥塞,提升整个网络的服务质量。 限速的方式?在高并发的场景下,我们的优化和保护系统的方式通常有:多级缓存、资源隔离、熔断降级、限流等等。 网络限速有很多种方式,比如网卡(接口)限速,队列限速,meter表限速。其中meter表限速是颇具代表性的限速方式。 流量限速技术常用的流量限速有两种技术:
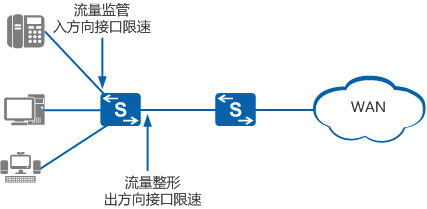
可以监督不同流量进入网络的速率,对超出部分的流量进行“惩罚”,使进入的流量被限制在一个合理的范围之内,从而保护整个网络资源和用户的利益。 流量整形(Traffic Shaping) 背景对于网络传输而言,丢包带来的成本是很高的,因为一些重要的数据包丢失后,是需要 “重传” 的,而 “重传” 太多,来回反复会增加了数据传输的延时,也会进一步恶化网络负荷,最终极大地降低了传输的效率。 需要从根本上尽可能地减少 “丢包” 的产生,简单来说,就是控制单位时间内送入网络传输的数据量,尽量平滑且不要超过网络带宽承载能力。 为了避免丢包,我们需要尽可能地将数据 “平滑” 地送入网络中,因此,“流量整形” 在此派上了用场,它作用于 “发送模块”,目标是调整数据传输的平均速率,防止突发性的流量暴增导致网络拥塞和丢包。 定义流量整形通常是为了使报文速率与下游设备相匹配。当从高速链路向低速链路传输数 据或发生突发流量时,带宽会在低速链路出口处出现瓶颈,导致数据丢失严重。这种 情况下,需要在进入低速链路的设备出口处进行流量整形;所以流量整形是一种主动调整流量输出速率的措施,其作用是限制流量与突发,使这类报文以比较均匀的速率向外发送。 流量整形是用于限制某个或某些队列的输出速率,超速的报文不是直接丢弃,而是暂时存在缓存里,等空闲了还是会输出,只有缓存满了之后才会丢弃。流量整形将上游不规整的流量进行削峰填谷,使流量输出比较平稳,从而解决下游设备的拥塞问题。 流量整形处理流程图单速单桶技术的基于流的队列整形;流量整形通常使用缓冲区和令牌桶来完成:
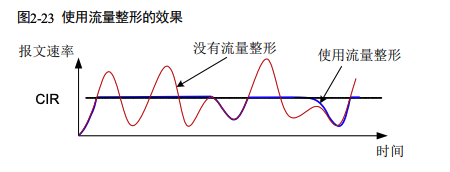
具体处理流程如下: 当报文到来的时候,首先对报文进行分类,使报文进入不同的队列。若报文进入的队列没有配置队列整形功能,则直接发送该队列的报文;否则,进入下一步处理。按用户设定的队列整形速率向令牌桶中放置令牌: 如果令牌桶中有足够的令牌可以用来发送报文,则报文直接被发送,在报文被发送的同时,令牌做相应的减少。如果令牌桶中没有足够的令牌,则将报文放入缓存队列,如果报文放入缓存队列时,缓存队列已满,则丢弃报文。缓存队列中有报文的时候,会与令牌桶中的令牌数作比较,如果令牌数足够发送报文则转发报文,直到缓存队列中的报文全部发送完毕为止。使用流量整形的效果 通过在上游设备的接口出方向配置流量整形,将上游不规整的流量进行削峰填谷, 输出一条比较平整的流量(如图 2-23),从而解决下游设备的瞬时拥塞问题。
流量监管和流量整形的对比
对于流量监管技术,当流量速率达到所配置的最大速率时,将丢弃(或重新标记)超额流量。其结果是,输出速率显示为带有波峰和波谷的锯齿状。相对于比较重要的突发流量,如果采用令牌桶技术可能导致重要数据的丢失; 采用流量整形技术,将超出的流量来不及转发的数据存放起来,在端口有带宽时再转发。流量整形在队列中保留额外的数据包,然后对额外的数据包进行调度,以便随时间的增加稍后传输。流量整形的结果是一个平滑的数据包输出速率。
常见的限流算法 既然要限速,那首先要解决测量速度的问题。以下介绍测试方法。 QoS是网络中提供差异化服务的重要方法,它通过区分不同的流量和优先级,为不同的应用和使用者提供不同质量的网络服务,比如,金融网络,可能购买了专线,要求延迟小,更不能忍受丢包,自然优先级就高些;又比如网络直播和游戏,对于网络的延迟要求非常高,而普通的上网用户则没有这么高的要求; 计数器算法 计数器算法简单粗暴,设置 1s 内的请求数阈值 qps。比如 qps = 100,从第一个请求进来开始计时,并将计数值置 0,在接下来的1s 内,每来一个请求,就把计数值加 1,如果计数值达到100,那后面的请求就全部拒绝。等到 1s 结束,把计数恢复为 0,重新开始计数。 缺点: 如果在某个 1s 内的前 10ms,已经通过了100个请求,那后面的 990ms,就只能眼巴巴的把请求拒绝。这种现象被称为突刺现象。 漏桶算法
为了消除突刺现象,可以设置一个漏桶(漏斗)。漏桶算法思路很简单,水(请求)先进入到漏桶里,漏桶以一定的速度出水,当水流入速度过大会直接溢出; 请求进来,相当于水倒入漏桶,然后从下面小口缓慢匀速的流出,不管上面的流量多大,下面流量始终不变。 所以我们需要设置两个参数:桶最大容量 cap 和漏出速率 r。若当前进来的请求数达到 cap,即漏桶满了,那后面进来的请求就拒绝掉;若 r = 50,则表示每秒处理 50 个请求,即 20ms 处理一个请求。 实现的话,可以用队列作为漏桶,然后拿另外一个线程以速率 r 从队列中拿请求来处理。一次可以拿多个请求实现并发。 缺点 无法应对短时间的突发流量。漏桶算法的出水速度是恒定的,那么意味着如果瞬时大流量的话,将有大部分请求被丢弃掉(也就是所谓的溢出)。 令牌桶算法生成令牌的速度是恒定的,而请求去拿令牌是没有速度限制的。这意味,面对瞬时大流量,该算法可以在短时间内请求拿到大量令牌,而且拿令牌的过程并不是消耗很大的事情。 令牌桶算法 令牌桶算法中想象了一种令牌和令牌桶。令牌桶容量为 b,令牌以速率 r 产生,比如 r = 2 表示每秒产生 2 个令牌,即每 500ms 产生一个。当大量请求进来时,每个请求会消耗一个令牌,当令牌被消耗时,让后面的请求处于等待状态或直接将其拒绝掉。是不是很简单?实现的话,不需要实现令牌,也不需要实现令牌桶,只需要有一个变量记录令牌数,当请求进来时,判断令牌数是否为零,来决定处理还是拒绝,若处理的话要让令牌数 -1。另外需要一个线程来只要令牌数小于 b 就以 r 的速率让令牌数 +1。 定义 令牌桶(Token-Bucket)是目前最常采用的一种流量测量方法,用来评估流量速率是否超过了规定值。这里的令牌桶是指网络设备的内部存储池,而令牌则是指以给定速率填充令牌桶的虚拟信息包。 令牌桶可以看作是一个存放令牌的容器,预先设定一定的容量。 系统按设定的速度向桶中放置令牌,当桶中令牌满时,多余的令牌溢出。
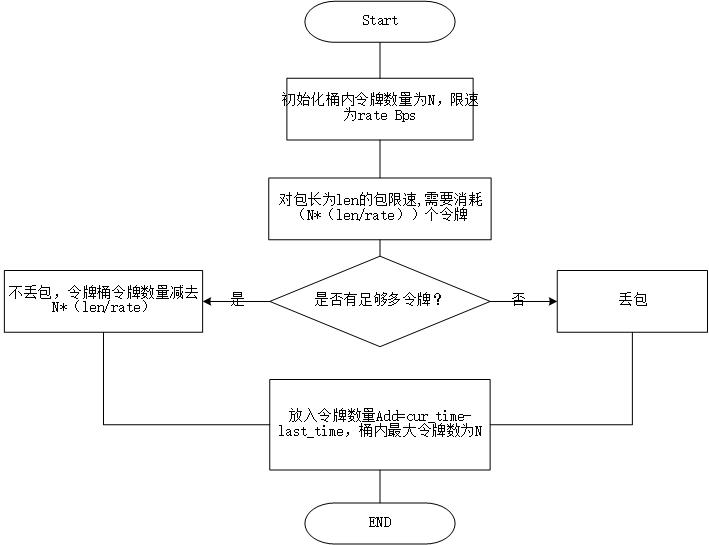
说明: 令牌桶只是一种流量测量方法,并不能对流量进行过滤或采取某种措施,比如说丢弃数据包等,这些操作由其他功能完成。 令牌桶中装的是令牌而不是分组。 如上所示,匀速的产生令牌,往桶里面丢;每次请求来,看是否有多余的令牌。如果有,获取令牌执行正常业务;如没有,丢包限速。 令牌桶算法测速限速的原理就是:每个符合规则的报文,只有在从桶中拿到令牌后才能发送出去。拿不到令牌,则丢弃; 1)桶中的令牌是怎么来的呢? 可以自己设置桶中令牌生成的速度,也就是通过设置生成令牌的生成速度来定义发送数据包的速度。 分类通常为了解决数据包突发性问题等,会使用2个令牌桶,根据他们各自生成令牌的速度,分为单速三色标记和双速三色标记。 RFC 中定义了两种令牌桶算法: 单速率三色标记(single rate three color marker,srTCM,RFC2697定义,或称为单速双桶算法)算法,主要关注报文尺寸的突发。 双速率三色标记(two rate three color marker,trTCM,RFC2698定义,或称为双速双桶算法)算法,主要关注速率的突发。 两种算法的评估结果都是为报文打上红、黄、绿三种颜色的标记,所以称为“三色标记”。这两种算法都允许流量在一定程度上突发,但单速率三色标记关注报文尺寸的突发,而双速率三色标记则关注速率上的突发。单速率较双速率实现简单,成为目前业界比较常用的流量评估方式。 QoS 会根据报文的颜色,设置报文的丢弃优先级;两种算法都可以工作于色盲模式和色敏模式下。 原理 基本原理令牌桶算法,顾名思义,系统按照一定的投放方式向桶中放置令牌,当桶中令牌满时,多出的令牌溢出,桶中令牌不再增加。如下图所示。 当有需要限速的数据包通过的时候,依据数据报文的长度算出需要取走的令牌数N(比如 限速的bps值和桶中的令牌数N对应)。 如果桶中的令牌数量大于N,那么此数据包就顺利过了限速测试。 反之,此数据包就没有通过限速测试,于是就将报文进行丢弃处理(大多数情况下是如此,也可以进行其他处理,依赖用户程序的设计)。
系统按照一定的投放方式向桶中放置令牌,当桶中令牌满时,多出的令牌溢出,桶中令牌不再增加。存在2种投放方式去投放桶中令牌: 1)方式一:设置定时器,在定时器的回调函数中周期性的放入令牌。 周期性的添加,定时器的时间间隔就是令牌桶的容量与添加速率的比值:△t=CBS/CIR,每次添加的令牌数为 CBS 个。 解析: 可以利用dpdk的定时器,比如设置每1秒,call以下回调函数,放入令牌1 * N个令牌。 缺陷1: 如果在这一秒钟内,如果前0.5秒的突发流量将令牌都消耗完了,那么后0.5秒的报文不就全部丢掉了。有人说,可以将这个间隔设置小一点啊,比如每1/1000秒放入N/1000个令牌。但是问题在于,这个间隔到底是多少好呢? 比如,粒度细化到 每隔 1s/CIR 时间添加一个令牌;(1s可以转化为 cycles,即每个n个cycles往令牌桶中添加一个令牌;) 缺陷2: 无法处理突发流量,原因见方式3。 注:其实也没有必要单独搞一个真的定时器,或者一个单独的线程进行投放令牌;只需要在每次数据包过桶前,判断下当前时间和上次投放桶令牌时间的差值diff_cycles 是否满足 period_cycles 即可,来决定是否投放令牌; 2)方式2: 按时间间隔放入 一次性添加,添加令牌的数量是△t×CIR(△t 是当前时间与上次添加令牌的时间之差),且是一次添加完毕,并不是按照一定速率添加。 解析: 按时间间隔放入,假设当前报文和上一个报文的时间间隔为1ms秒,那么放入1/1000 * N 个令牌。这种方式的好处在于针对于每个数据包的处理前都会放入令牌,分散令牌的放入。 缺陷: 无法处理突发流量,原因见方式3
初始化桶内的令牌数为N,限速为 rate Bps, 即对应关系为 N1:rate1 = N2: rate2; 一个数据包,包长为 len:则 N1:rate1 = N2: len, 所以 N2 = len * (N1/rate1) 3) 方式2改进 背景: 方式1和方式2都面临一个问题,如果有突发流量,那么可能在极短的时间内消耗全部的令牌;前期短期内大量的流量被放行,从而对系统造成威胁;后续的时间内,集中丢包。 解析: 当出现丢包后,那么在接下来的200us内的前64个报文都会被丢弃(即200us内丢弃的是64个包,而不是大量的包)。对于200us和64这个值都是经验值,可以在真实场景中进行调优。 缺陷: 这个方式降低了突发流量对系统的威胁,但是会对限速的准确性有一定的影响,通过测试可以证明。
注:方式2和方式3可以协作运行,比如用方式3先进行防攻击限速,然后再用方式2进行精确限速。 CAR什么是CAR 流量监管采用承诺访问速率CAR(Committed Access Rate)来对流量进行控制。CAR利用令牌桶来衡量每个数据报文是超过还是遵守所规定的报文速率。 CAR主要有两个功能: 流量速率限制:通过使用令牌桶对流经端口的报文进行度量,使得在特定时间内只有得到令牌的流量通过,从而实现限速功能。 流分类:通过令牌桶算法对流量进行测量,根据测量结果给报文打上不同的流分类内部标记(包括服务等级与丢弃优先级)。
CAR的处理流程
当报文到来时,首先检查端口的匹配规则,如果匹配上了,则进行速率控制,报文进入令牌桶中进行流量速率评估。 令牌桶评估后,报文被标记为红、黄、绿三种颜色。红色表示报文速率过大,不符合规定;黄色表示虽然不符合规定但允许临时的突发,绿色表示符合规定。 报文标为红色的直接丢弃,黄色则重新标记后转发,绿色则直接转发。
CAR的报文标记过程 CAR中令牌添加方式是报文触发,添加令牌的数量是CIR×当前时间与上次添加令牌的时间之差。向桶内注入令牌后,再判断桶内的令牌数是否满足传送该报文的要求。 CAR支持单速单桶、单速双桶、双速双桶的标记方式。 单速率三色标记(srTCM单速双桶算法) 算法 定义单速双桶采用RFC2697定义的单速三色标记器srTCM(Single Rate Three Color Marker)算法对流量进行测评,根据评估结果为报文打颜色标记,即绿色、黄色和红色。
CIR(Committed Information Rate):承诺信息速率,单位是 bit/s,表示向C桶中投放令牌的速率; CBS(Committed Burst Size):承诺突发尺寸,单位是 bit,即为令牌桶的容量(深度),即C桶瞬间能够通过的承诺突发流量,用来定义在部分流量速率超 过CIR之前的最大突发流量;承诺突发尺寸必须大于报文的最大长度(最大时一个分组可以领取桶中的全部令牌)。CBS越大,表示所允许的突发量越大。 EBS(Excess Burst Size):超额突发尺寸,表示E桶的容量,即E桶瞬间能够通过的超出突发流量,用来定义在所有流量速率超过CIR之前的 最大突发量; B: 对于到达的报文,用B表示报文的大小: C 桶容量为CBS, E 桶容量为EBS,总容量是CBS+EBS。如果不允许有突发流量,EBS 则设置成 0。 当 EBS≠0 时,称为单速双桶。 当 EBS=0,E桶的令牌数始终为 0,相当于只使用了一个令牌桶——C桶,这种情况也称为单速单桶。 向桶中投放令牌
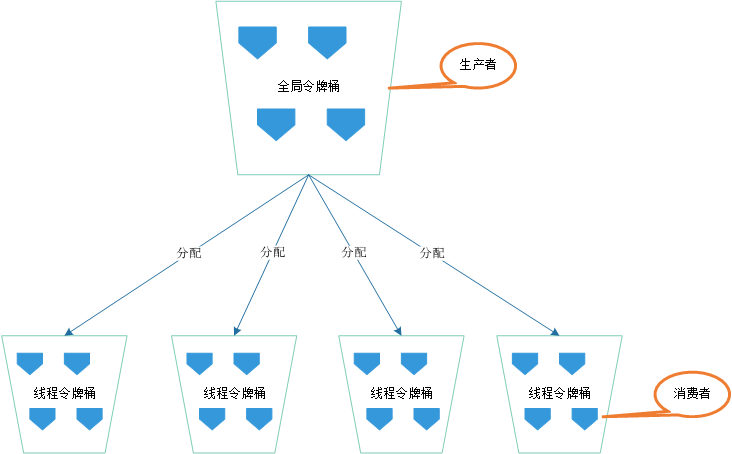
单速双桶令牌添加方式比较简单,先以CIR的速率往C桶中添加令牌,当C桶容 量到达 CBS 后(C桶满了),再以相同的速率往E 桶中添加令牌(E 桶的令牌用做 以后临时超过CIR的突发流量),当E桶容量到达 EBS 后(E 桶也满了),则新产 生的令牌将会被丢弃。 初始状态下,C 桶和 E桶都是满的。 系统按照CIR速率向桶中投放令牌: 若Tccir == 0) || ((params->cbs == 0) && (params->ebs == 0))) { return -2; } /* Initialize srTCM run-time structure */ hz = rte_get_tsc_hz(); m->time = rte_get_tsc_cycles(); m->tc = m->cbs = params->cbs; m->te = m->ebs = params->ebs; rte_meter_get_tb_params(hz, params->cir, &m->cir_period, &m->cir_bytes_per_period); RTE_LOG(INFO, METER, "Low level srTCM config: \n" "\tCIR period = %" PRIu64 ", CIR bytes per period = %" PRIu64 "\n", m->cir_period, m->cir_bytes_per_period); return 0; } /* 每隔 1s/CIR 时间添加一个令牌; 1s可以转化为 cycles,即每个n个cycles往令牌桶中添加一个令牌; 一个令牌可以理解为1B; */ static void rte_meter_get_tb_params(uint64_t hz, uint64_t rate, uint64_t *tb_period, uint64_t *tb_bytes_per_period) { double period = ((double) hz) / ((double) rate); if (period >= RTE_METER_TB_PERIOD_MIN) { *tb_bytes_per_period = 1; *tb_period = (uint64_t) period; } else { *tb_bytes_per_period = (uint64_t) ceil(RTE_METER_TB_PERIOD_MIN / period); *tb_period = (hz * (*tb_bytes_per_period)) / rate; } } PARAMS: struct rte_meter_srtcm_params app_srtcm_params[] = { {.cir = 1000000 * 46, .cbs = 2048, .ebs = 2048}, }; 桶中添加令牌以及流量过桶 针对每个包,都会进行颜色判断,色盲模式的判断比较简单,对应的函数如下: /* blind check:此中为 色盲模式; */ static inline enum rte_meter_color rte_meter_srtcm_color_blind_check(struct rte_meter_srtcm *m, uint64_t time, uint32_t pkt_len) { uint64_t time_diff, n_periods, tc, te; /* Bucket update */ time_diff = time - m->time; n_periods = time_diff / m->cir_period; m->time += n_periods * m->cir_period;//m->time = time。强行增加阅读难度,更新m->time /* 先往C桶添加令牌,C桶添加满之后再往E桶添加令牌 */ tc = m->tc + n_periods * m->cir_bytes_per_period; //更新当前C桶可用令牌数 te = m->te; if (tc > m->cbs) { te += (tc - m->cbs); if (te > m->ebs) te = m->ebs; tc = m->cbs; } /* Color logic */ //C桶可用令牌足够,返回绿色。 if (tc >= pkt_len) { m->tc = tc - pkt_len; m->te = te; return e_RTE_METER_GREEN; } //C桶不够,用E桶判断。 if (te >= pkt_len) { m->tc = tc; m->te = te - pkt_len; return e_RTE_METER_YELLOW; } m->tc = tc; m->te = te; return e_RTE_METER_RED; } 多线程处理多线程处理的基本思想,如下图所示: 一个全局令牌桶 随着时间的推移,每次放入令牌仅仅放入全局令牌桶。为什么不放入线程令牌桶?假设需要限速的报文到了不同的线程,并且每个线程流量不同,那么对于每个线程放入令牌的数量就不得而知了。每个线程拥有独立的子令牌桶 子令牌桶只消费令牌,不放入令牌。当子令牌桶的令牌不够时,从全局令牌桶索取令牌。
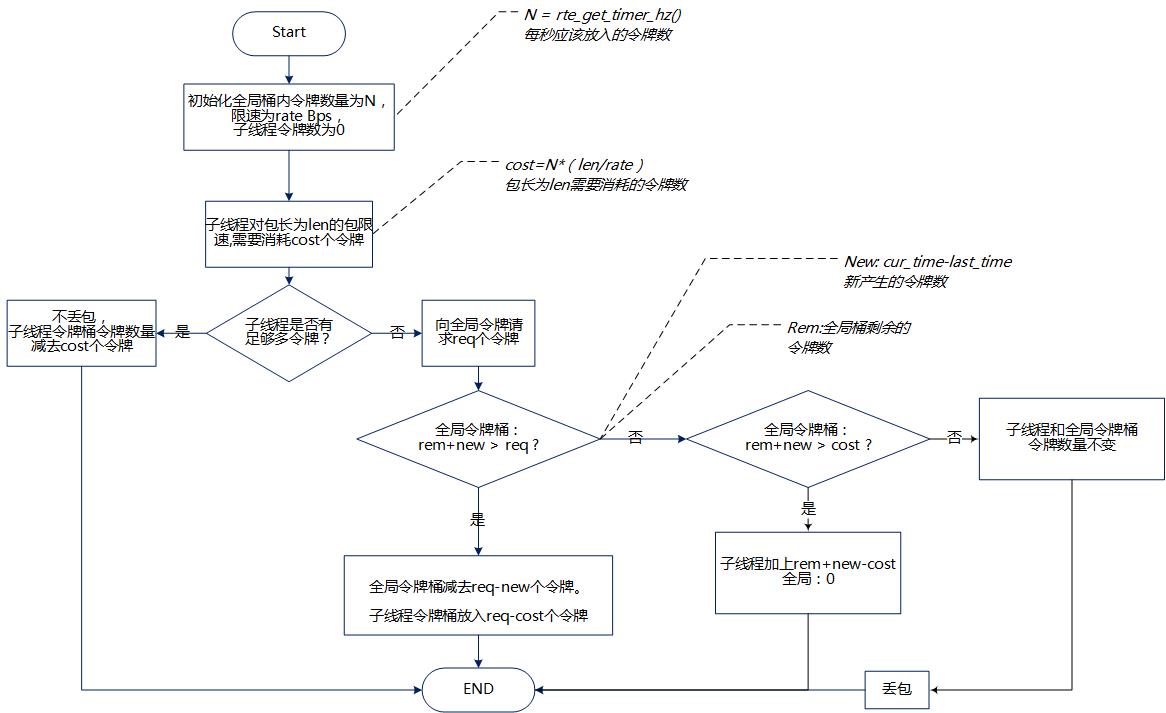
详细流程 下面将用流程图的形式来描述多线程令牌桶的实现。在最后会介绍这种令牌桶算法可能存在的问题。
dpdk 单速率三色算法优化 主要涉及到 1)报文平滑优化;通过借贷方式 2)dpdk 除法的优化; 3)引入扩大因子 解决 CIR太大时 cir_period 过小的问题 参见:https://blog.csdn.net/armlinuxww/article/details/70212790 其他优化平滑策略,如下所示 防止单条连接长时间没有包通过背景: 比如一条长连接,由于限速,后续长时间(比如200ms),没有一个包可以通过;这样会流量不太平滑; 解决: 理想状态,比如对于一个长连接,每隔200ms,尽可能的保证至少有一个数据包可以通过; 那么就可以基于连接的五元组进行hash,然后以hash值在bitmap中查找; 没有找到,则首次运行通过,不检查 pkt_len 和 tc,tc-= pkt_len; 查找到,则判断 pkt_len 和 tc 的大小关系,决定是否通过; 每隔200ms,将 bitmap 清空; 注:bitmap标志位需要定期清理的; tcp重传数据包允许通过背景:第一个包被丢弃,client重传,有可能继续被丢弃,可以设置重传的包可以通过; 解决:基于五元组+seq进行hash,然后设置bitmap的标志位,如果该标志位设置过了,则允许通过;注:bitmap标志位需要定期清理的; 一个连接的首包允许通过解决:基于五元组进行hash,查看bitmap,没有设置,则允许通过;注:bitmap标志位需要定期清理的; 限流规则/参数的合理性限流规则包含三个部分:时间粒度,接口粒度,最大限流值。限流规则设置是否合理直接影响到限流是否合理有效。 限流时间粒度我们既可以选择 1 秒钟不超过 1000 次,也可以选择 10 毫秒不超过 10 次,还可以选择 1 分钟不超过 6 万次; 虽然看起这几种限流规则都是等价的,但过大的时间粒度会达不到限流的效果,比如限制 1 分钟不超过 6 万次,就有可能 6 万次请求都集中在某一秒内; 相反,过小的时间粒度会削足适履导致误杀很多本不应该限流的请求,因为接口访问在细时间粒度上随机性很大。 所以,尽管越细的时间粒度限流整形效果越好,流量曲线越平滑,但也并不是越细越合适。 对于访问量巨大的接口限流,比如秒杀,双十一,这些场景下流量可能都集中在几秒内,QPS 会非常大,几万甚至几十万,需要选择相对小的限流时间粒度。相反,如果接口 QPS 很小,建议使用大一点的时间粒度,比如限制 1 分钟内接口的调用次数不超过 1000 次; 参考基于DPDK的多核令牌桶算法 单速双桶、双速双桶原理 CAR 流量评估与令牌桶技术 QoS 技术白皮书 QOS-HCIE 知乎
|










 如上图所示,为方便描述将两个令牌桶称为C桶和E桶(意为Excess超额桶),用Tc和Te表示桶中的令牌数量。
如上图所示,为方便描述将两个令牌桶称为C桶和E桶(意为Excess超额桶),用Tc和Te表示桶中的令牌数量。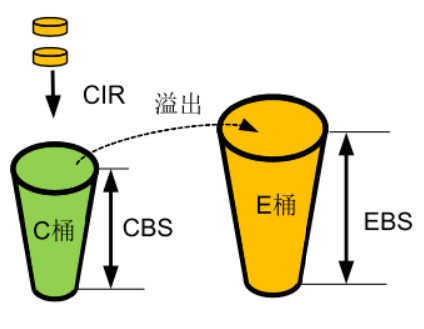
【本文地址】