| 汽车的360度影像是什么原理,为什么能在屏幕上看到整个车周围的环境? | 您所在的位置:网站首页 › 汽车全景摄像头是什么原理 › 汽车的360度影像是什么原理,为什么能在屏幕上看到整个车周围的环境? |
汽车的360度影像是什么原理,为什么能在屏幕上看到整个车周围的环境?
|
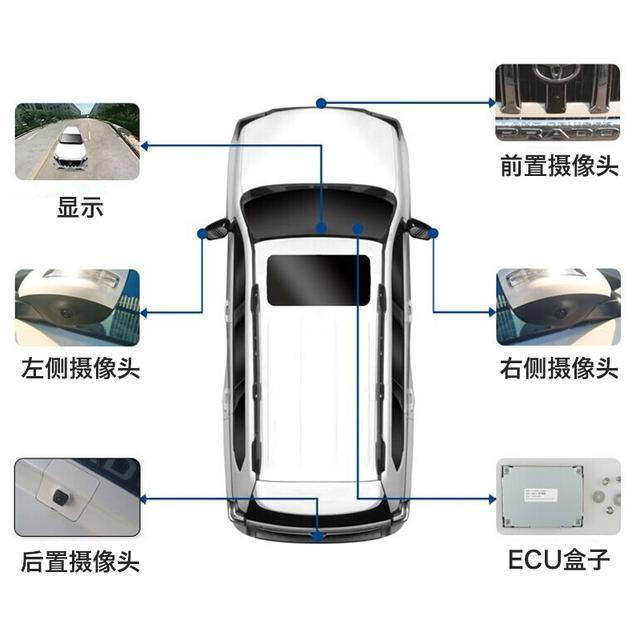
首先是原理 一般而言要实现360°全景影像,需要配置前后左右4个超广角摄像头,使用摄像头采集到的影像。 使用各种算法来优化图像,最大程度上消除广角摄像头的鱼眼崎变,最后拼接呈现到中控显示屏上。
这种全景环视的于2006年提出,2007年由日产首次发布完全的“环景监视系统AVM”。 360°图像的显示步骤: 1、摄像头采集图像 2、 以汽车外形尺寸为原点,确定摄像头坐标及图像尺寸 3、分析各外在环境对摄像头的影响,使用算法优化图像 4、根据人眼视觉习惯,使用算法进行图像拼接融合 5、将车型模型,嵌入图像,以形成最终的360度立体图像。
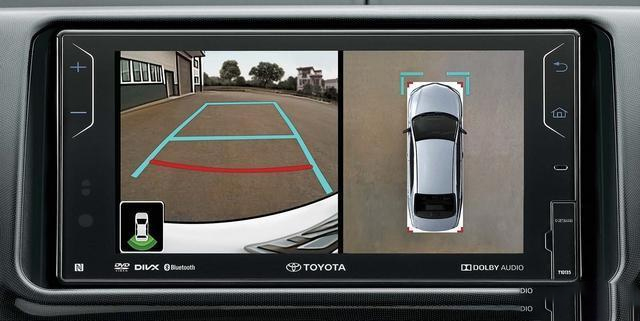
其次,“看到整个车周围的环境”这样的表述不太准确。 由于环景影响是由4个广角摄像头提供的4副图像拼接而成,所以汽车的4角拼接区域照样是有盲区的。 并且根据算法和摄像头的不同,360度影像成像也有不同;现阶段图像均有一定失真,距离等无法完全参考该图像。
最后,摄像头位置以上的区域大多是无法拍到的;也就是说若有靠墙倒车,墙上有一个凸起,这个凸起在后置摄像头以上,那么360度环景影像是无法显示的。 至于车顶、发动机舱盖等区域就更无法靠360度环景影像捕捉了。返回搜狐,查看更多 责任编辑: |

【本文地址】
公司简介
联系我们