| 动手学深度学习(二十四) | 您所在的位置:网站首页 › 标准化残差的计算公式 › 动手学深度学习(二十四) |
动手学深度学习(二十四)
|
一、为什么选择残差网络
在VGG中,卷积网络达到了19层,在GoogLeNet中,网络史无前例的达到了22层。那么,网络的精度会随着网络的层数增多而增多吗?在深度学习中,网络层数增多一般会伴着下面几个问题 计算资源的消耗(用GPU集群去怼)模型容易过拟合(扩大数据集、Droupout、批量归一化、正则化、初始化参数调整等等方法)梯度消失/梯度爆炸问题的产生(批量归一化)随着网络层数的增加,网络发生了退化(degradation)的现象:随着网络层数的增多,训练集loss逐渐下降,然后趋于饱和,当你再增加网络深度的话,训练集loss反而会增大。注意这并不是过拟合,因为在过拟合中训练loss是一直减小的。 当网络退化时,浅层网络能够达到比深层网络更好的训练效果,这时如果我们把低层的特征传到高层,那么效果应该至少不比浅层的网络效果差,或者说如果一个VGG-100网络在第98层使用的是和VGG-16第14层一模一样的特征,那么VGG-100的效果应该会和VGG-16的效果相同。所以,我们可以在VGG-100的98层和14层之间添加一条直接映射(Identity Mapping)来达到此效果。 从信息论的角度讲,由于DPI(数据处理不等式)的存在,在前向传输的过程中,随着层数的加深,Feature Map包含的图像信息会逐层减少,而ResNet的直接映射的加入,保证了 l + 1 l+1 l+1层的网络一定比 l l l层包含更多的图像信息。 基于这种使用直接映射来连接网络不同层直接的思想,残差网络应运而生。 二、残差网络(ResNet)随着我们设计越来越深的网络,深刻理解“新添加的层如何提升神经网络的性能”变得至关重要。更重要的是设计网络的能力,在这种网络中,添加层会使网络更具表现力,为了取得质的突破,我们需要一些数学基础知识。 2.1 函数类首先,假设有一类特定的神经网络结构 F \mathcal{F} F,它包括学习速率和其他超参数设置。对于所有 f ∈ F f \in \mathcal{F} f∈F,存在一些参数集(例如权重和偏置),这些参数可以通过在合适的数据集上进行训练而获得。 现在假设 f ∗ f^* f∗ 是我们真正想要找到的函数,如果是 f ∗ ∈ F f^* \in \mathcal{F} f∗∈F,那我们可以轻而易举的训练得到它,但通常我们不会那么幸运。相反,我们将尝试找到一个函数 f F ∗ f^*_\mathcal{F} fF∗,这是我们在 F \mathcal{F} F 中的最佳选择。例如,给定一个具有 X \mathbf{X} X 特性和 y \mathbf{y} y 标签的数据集,我们可以尝试通过解决以下优化问题来找到它: f F ∗ : = a r g m i n f L ( X , y , f ) subject to f ∈ F . (2.1) f^*_\mathcal{F} := \mathop{\mathrm{argmin}}_f L(\mathbf{X}, \mathbf{y}, f) \text{ subject to } f \in \mathcal{F}. \tag{2.1} fF∗:=argminfL(X,y,f) subject to f∈F.(2.1) 那么,怎样得到更近似真正 f ∗ f^* f∗ 的函数呢? 唯一合理的可能性是,我们需要设计一个更强大的结构 F ′ \mathcal{F}' F′。换句话说,我们预计 f F ′ ∗ f^*_{\mathcal{F}'} fF′∗ 比 f F ∗ f^*_{\mathcal{F}} fF∗ “更近似”。然而,如果 F ⊈ F ′ \mathcal{F} \not\subseteq \mathcal{F}' F⊆F′,则无法保证新的体系“更近似”。 事实上, f F ′ ∗ f^*_{\mathcal{F}'} fF′∗ 可能更糟: 如下图所示,对于非嵌套函数(non-nested function)类,较复杂的函数类并不总是向“真”函数 f ∗ f^* f∗ 靠拢(复杂度由 F 1 \mathcal{F}_1 F1 向 F 6 \mathcal{F}_6 F6 递增)。在下图的左边,虽然 F 3 \mathcal{F}_3 F3 比 F 1 \mathcal{F}_1 F1 更接近 f ∗ f^* f∗,但 F 6 \mathcal{F}_6 F6 却离的更远了。相反对于图右侧的嵌套函数(nested function)类 F 1 ⊆ … ⊆ F 6 \mathcal{F}_1 \subseteq \ldots \subseteq \mathcal{F}_6 F1⊆…⊆F6,我们可以避免上述问题。 
因此,只有当较复杂的函数类包含较小的函数类时,我们才能确保提高它们的性能。对于深度神经网络,如果我们能将新添加的层训练成 恒等映射(identity function) f ( x ) = x f(\mathbf{x}) = \mathbf{x} f(x)=x ,新模型和原模型将同样有效。同时,由于新模型可能得出更优的解来拟合训练数据集,因此添加层似乎更容易降低训练误差。 针对这一问题,何恺明等人提出了残差网络(ResNet)He.Zhang.Ren.ea.2016。它在2015年的ImageNet图像识别挑战赛夺魁,并深刻影响了后来的深度神经网络的设计。残差网络的核心思想是:每个附加层都应该更容易地包含原始函数作为其元素之一。于是,残差块 (residual blocks) 便诞生了,这个设计对如何建立深层神经网络产生了深远的影响。凭借它,ResNet 赢得了 2015 年 ImageNet 大规模视觉识别挑战赛。 2.2 残差块让我们聚焦于神经网络局部:如下图所示,假设我们的原始输入为 x x x ,而希望学出的理想映射为 f ( x ) f(\mathbf{x}) f(x) (作为 residual_block 上方激活函数的输入)。下左图虚线框中的部分需要直接拟合出该映射 f ( x ) f(\mathbf{x}) f(x) ,而右图虚线框中的部分则需要拟合出残差映射 f ( x ) − x f(\mathbf{x}) - \mathbf{x} f(x)−x 。 残差映射在现实中往往更容易优化。以上一节中提到的恒等映射作为我们希望学出的理想映射 f ( x ) f(\mathbf{x}) f(x) ,我们只需将 residual_block 中右图虚线框内上方的加权运算(如仿射)的权重和偏置参数设成 0,那么 f ( x ) f(\mathbf{x}) f(x) 即为恒等映射。 实际中,当理想映射 f ( x ) f(\mathbf{x}) f(x) 极接近于恒等映射时,残差映射也易于捕捉恒等映射的细微波动。residual_block 右图是 ResNet 的基础结构-- 残差块(residual block)。在残差块中,输入可通过跨层数据线路更快地向前传播。 这里可能会让人有一些混淆,梳理一下: 网络的每一层我们看作是: y = H ( x ) y = H(x) y=H(x),也就是这里的输出 f ( x ) f(x) f(x)残差网络的一个残差块可以表示为: H ( x ) = F ( x ) + x H(x) = F(x) + x H(x)=F(x)+x,这里的 F ( x ) F(x) F(x)等价于residual_block 右图虚线框中的部分那么就可以得到: F ( x ) = H ( x ) − x F(x) = H(x) -x F(x)=H(x)−x,也就是 f ( x ) − x f(x) - x f(x)−x
残差块的结构: ResNet 沿用了 VGG 完整的 3 × 3 3\times 3 3×3 卷积层设计。残差块里首先有 2 个有相同输出通道数的 3 × 3 3\times 3 3×3 卷积层。每个卷积层后接一个批量归一化层和 ReLU 激活函数。然后我们通过跨层数据通路,跳过这 2 个卷积运算,将输入直接加在最后的 ReLU 激活函数前。这样的设计要求 2 个卷积层的输出与输入形状一样,从而可以相加。如果想改变通道数,就需要引入一个额外的 1 × 1 1\times 1 1×1 卷积层来将输入变换成需要的形状后再做相加运算。 2.3 残差网络的数学原理参差网络的通用表示方式是: y l = h ( x l ) + F ( x l , W l ) (2.2) y_l = h(x_l)+ F(x_l,W_l) \tag{2.2} yl=h(xl)+F(xl,Wl)(2.2) x l + 1 = f ( y l ) (2.3) x_{l+1} = f(y_l) \tag{2.3} xl+1=f(yl)(2.3) 现在我们先不考虑升维或者降维的情况,那么假设公式2.2和2.3中 h ( . ) h(.) h(.)是直接映射 f ( . ) f(.) f(.)是激活函数,一般使用ReLU。那么残差块儿可表示为: x l + 1 = x l + F ( x l , W l ) (2.4) x_{l+1} = x_l + F(x_l,W_l) \tag{2.4} xl+1=xl+F(xl,Wl)(2.4) 对于一个更深的层L,其与l层的关系可以表示为: x L = x l + ∑ i = l L − 1 F ( x i , W i ) (2.5) x_L = x_l + \sum_{i=l}^{L-1}F(x_i,W_i) \tag{2.5} xL=xl+i=l∑L−1F(xi,Wi)(2.5) 公式2.5 反映残差网络的两个特性: L层可以用任意一个比它浅的l层网络和他们之间的残差部分之和进行表示公式中L是各个残差块特征的单位累和,而MLP是特征矩阵累积根据向后传播中使用的导数的链式法则,损失函数 ϵ \epsilon ϵ关于 x l x_l xl的梯度可以表示为: ∂ ϵ ∂ x l = ∂ ϵ ∂ x L ∂ x L ∂ x l = ∂ ϵ ∂ x L ( 1 + ∂ ∂ x l ∑ i = l L − 1 F ( x i , W i ) ) = ∂ ϵ ∂ x L + ∂ ϵ ∂ x L ∂ ∂ x l ∑ i = l L − 1 F ( x i , W i ) (2.6) \begin{aligned} \frac{\partial{\epsilon}}{\partial{x_l}} &= \frac{\partial{\epsilon}}{\partial{x_L}}\frac{\partial{x_L}}{\partial{x_l}} \\ &= \frac{\partial{\epsilon}}{\partial{x_L}}(1+\frac{\partial{}}{\partial{x_l}}\sum_{i=l}^{L-1}F(x_i,W_i))\\ &= \frac{\partial{\epsilon}}{\partial{x_L}}+ \frac{\partial{\epsilon}}{\partial{x_L}}\frac{\partial{}}{\partial{x_l}}\sum_{i=l}^{L-1}F(x_i,W_i)\\ \end{aligned} \tag{2.6} ∂xl∂ϵ=∂xL∂ϵ∂xl∂xL=∂xL∂ϵ(1+∂xl∂i=l∑L−1F(xi,Wi))=∂xL∂ϵ+∂xL∂ϵ∂xl∂i=l∑L−1F(xi,Wi)(2.6) 公式2.6 中反映了: 在整个训练过程中, ∂ x l ∑ i = l L − 1 F ( x i , W i ) {\partial{x_l}}\sum_{i=l}^{L-1}F(x_i,W_i) ∂xl∑i=lL−1F(xi,Wi)不可能一直为-1,所以残差网络中不会出现梯度消失的问题 ∂ ϵ ∂ x l \frac{\partial{\epsilon}}{\partial{x_l}} ∂xl∂ϵ表示L层的梯度可以直接传递给任何一个比其浅的l层 2.4 直接映射是最好选择?1.3 中我们假设了 h ( . ) h(.) h(.)是直接映射 f ( . ) f(.) f(.)是激活函数,一般使用ReLU。对于假设1,采用反证法:假设 h ( x l ) = λ l x l h(x_l) = \lambda_{l}x_l h(xl)=λlxl,那么这个时候残差块可以表示为: x l + 1 = λ l x l + F ( x l , W l ) (2.7) x_{l+1} = \lambda_lx_l+F(x_l,W_l) \tag{2.7} xl+1=λlxl+F(xl,Wl)(2.7) 对于更深的层: x L = ( ∏ i = l L − 1 λ i ) x l + ∑ i = l L − 1 F ( x i , W i ) (2.8) x_L = (\prod_{i=l}^{L-1}\lambda_i)x_l + \sum_{i=l}^{L-1}F(x_i,W_i) \tag{2.8} xL=(i=l∏L−1λi)xl+i=l∑L−1F(xi,Wi)(2.8) 为了简化问题,只考虑公式左半部分 x L = ( ∏ i = l L − 1 λ i ) x l x_L = (\prod_{i=l}^{L-1}\lambda_i)x_l xL=(∏i=lL−1λi)xl,损失函数 ϵ \epsilon ϵ关于 x l x_l xl的梯度可以表示为: ∂ ϵ ∂ x l = ∂ ϵ ∂ x L ( ( ∏ i = l L − 1 λ i ) + ∂ ∂ x l F ( x i , W i ) ) (2.9) \frac{\partial{\epsilon}}{\partial{x_l}} = \frac{\partial{\epsilon}}{\partial{x_L}}((\prod_{i=l}^{L-1}\lambda_i)+\frac{\partial{}}{\partial{x_l}}F(xi,Wi)) \tag{2.9} ∂xl∂ϵ=∂xL∂ϵ((i=l∏L−1λi)+∂xl∂F(xi,Wi))(2.9) 这个公式反映了: 当 λ > 1 \lambda > 1 λ>1,很有可能发生梯度爆炸(因为是连乘)当 λ < 1 \lambda < 1 λtrain_acc:.3f}, ' f'test acc {test_acc:.3f}') print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec ' f'on {str(device)}') lr, num_epochs, batch_size = 0.05, 10, 256 train_iter, test_iter = load_data_fashion_mnist(batch_size, resize=96) train(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu()) loss 0.019, train acc 0.994, test acc 0.882 854.6 examples/sec on cuda:0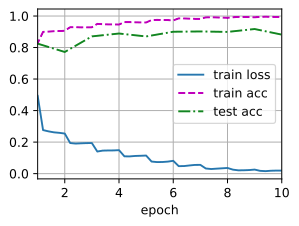 四、总结及问题
4.1 总结
学习嵌套函数(nested function)是训练神经网络的理想情况。在深层神经网络中,学习另一层作为恒等映射(identity function)较容易(尽管这是一个极端情况)。残差映射可以更容易地学习同一函数,例如将权重层中的参数近似为零。利用残差块(residual blocks)可以训练出一个有效的深层神经网络:输入可以通过层间的残余连接更快地向前传播。残差网络(ResNet)对随后的深层神经网络设计产生了深远影响,无论是卷积类网络还是全连接类网络。
4.2 问题
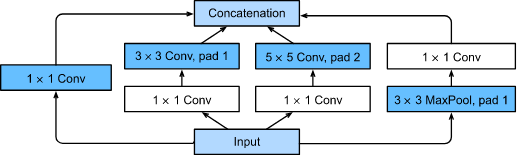
Inception块与残差块之间的主要区别是什么?在删除了Inception块中的一些路径之后,它们是如何相互关联的?
四、总结及问题
4.1 总结
学习嵌套函数(nested function)是训练神经网络的理想情况。在深层神经网络中,学习另一层作为恒等映射(identity function)较容易(尽管这是一个极端情况)。残差映射可以更容易地学习同一函数,例如将权重层中的参数近似为零。利用残差块(residual blocks)可以训练出一个有效的深层神经网络:输入可以通过层间的残余连接更快地向前传播。残差网络(ResNet)对随后的深层神经网络设计产生了深远影响,无论是卷积类网络还是全连接类网络。
4.2 问题
Inception块与残差块之间的主要区别是什么?在删除了Inception块中的一些路径之后,它们是如何相互关联的?
 参考 ResNet 论文He.Zhang.Ren.ea.2016 中的表 1,以实现不同的变体。
参考 ResNet 论文He.Zhang.Ren.ea.2016 中的表 1,以实现不同的变体。
参考文章详解残差网络 对于更深层次的网络,ResNet 引入了“bottleneck”架构来降低模型复杂性。请你试着去实现它。之后再实现 在 ResNet 的后续版本中,作者将“卷积层、批量归一化层和激活层”结构更改为“批量归一化层、激活层和卷积层”结构。请你做这个改进。详见 He.Zhang.Ren.ea.2016*1 中的图 1。调整一下结构即可,效果还不错 为什么即使函数类是嵌套的,我们仍然要限制增加函数的复杂性呢?我认为第一是因为复杂的函数会增加拟合的计算要求,第二是增加了过拟合的风险,第三是复杂的函数对网络结构底层训练的要求太大,实现起来效果会很差 |
【本文地址】