| 机械结构篇之四足机器人结构 | 您所在的位置:网站首页 › 机器人结构简图怎么画图片 › 机械结构篇之四足机器人结构 |
机械结构篇之四足机器人结构
|
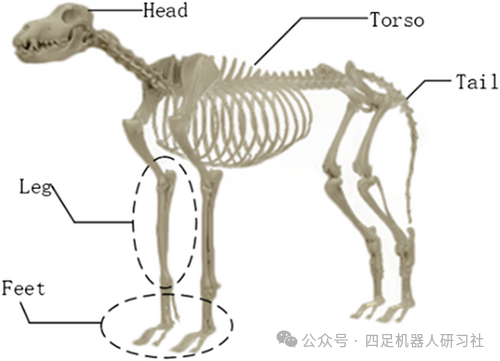
欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。 最近看到一篇不错的四足英文综述,截取部分翻译后给大家分享,原文和链接见文末!!! 目录 |0.摘要 |1.引言 |2.四足机器人结构 |2.1驱动模式 |2.1.1液压驱动 |2.1.2电机驱动 |2.1.3气体驱动 |2.2身体结构 |2.2.1刚性躯干 |2.2.2柔性躯干 |2.3腿部结构 |2.3.1连杆腿结构 |2.3.2缩放腿结构 |2.4支腿拓扑结构 |2.5足端结构 |0.摘要凭借其独特的与地面的点接触能力和对复杂地形的出色适应性,四足机器人已成为自动化和机器人工程领域的焦点。这些机器人在结构设计、运动规划、平衡控制等方面取得了重大研究进展。然而,当前研究的主要挑战在于进一步提高动态性能、环境适应性和有效载荷能力。本文全面讨论了四足机器人在结构设计、步态规划、传统控制策略、智能控制策略和自主运动等关键技术领域的研究成果。本文重点分析了上述领域的智能化和技术创新趋势,旨在为四足机器人研究提供有力的理论支撑和前瞻性的技术指导。此外,它还为从事该领域的学者提供了宝贵的参考。 |1.引言移动机器人因其在复杂或危险的工作环境中替代人类的能力而受到越来越多的关注,包括核电站、反恐行动、战争和地下煤矿。通常,这些机器人可分为三种类型:轮式、履带式和腿式。[1]轮式和履带式机器人擅长在平坦的表面上平稳快速地移动,并且它们的控制系统相对简单。然而,在穿越松软或不平坦的地形时,它们的效率会显着降低,甚至可能变得无法移动。相比之下,具有离散立足点的腿部机器人表现出卓越的适应性,它们可以在复杂的地形中导航,包括障碍物、沼泽、沙漠和不平坦的表面,同时保持身体稳定性。 此外,四足机器人具有不受限制的横向运动的优势,使其能够实现全向运动。[2]这种能力在自然界中可以观察到,羚羊等动物在陡峭的悬崖上自由航行,猎豹在草原上高速冲刺,雪橇犬在雪地中毫不费力地移动。腿式机器人具有在自然越野条件下有效运行的潜力,因为它们对特定行走表面的要求较低。因此,学者们对有腿的机器人进行了广泛的研究。然而,仿生腿机器人的结构、移动速度、负载能力和环境适应性仍然落后于动物机器人。 对腿式机器人的研究主要集中在双足、四足和六足机器人上,对单足和八足机器人的关注相对较少。适当数量的支腿对于确保机器人的高效运动和稳定性能起着至关重要的作用。[3]与两足机器人相比,四足机器人表现出更强的承载能力和卓越的稳定性。此外,与六足机器人和八足机器人相比,四足机器人具有更简单的结构和控制系统,使其成为腿式机器人领域中必不可少的分支。四足机器人的躯干是一个浮动底座,它的腿独立于躯干运行。这种设计使机器人能够平稳地穿越复杂的地形,即使在承受负载时也是如此。[4]近年来,众多研究团队集中研究四足机器人的动态步态、运动稳定性、平衡能力和高负载特性,旨在提高其动态稳定性、运动速度和运输能力。[5] 四足机器人对各种复杂地形的适应性扩大了其在不同场景下的应用范围。在现有的轮式和履带式运输工具面临挑战的自然环境中,四足机器人在处理重载运输任务时表现出更大的灵活性和效率。波士顿动力公司的Big Dog是世界上第一个能够在野外行走和搬运重物的四足机器人,是这种应用的一个很好的例子。它可用于战场上的物资运输任务。[6]四足机器人表现出比人类更强大的运动能力,这使得它们在探索危险或难以到达的区域(例如地震灾区、狭窄管道和核电站检查地点)方面很有价值。[7]值得一提的是,宇树科技公司研发的四足机器人已在工厂生产基地、变电站和建筑行业中发挥了作用,成功完成了巡检任务。[8]在矿产勘探中,机器人可以在高温高压环境下协助工人并代替人类,确保人类安全。[9]此外,四足机器人在服务业中也有广泛的应用。随着经济的快速发展,这些机器人可以陪伴人类缓解孤独和焦虑。他们进行情感交流,带来快乐,并提高人们对精神需求的满意度。此外,无需担心宠物的出生、衰老、疾病或死亡。[10] |2.四足机器人结构四足机器人是仿生自动化的一种形式,经过精心设计,可以忠实地复制动物的行走模式,并熟练地在复杂的环境中导航。实现四足机器人运动的基本任务在于结构设计。精心构思的结构在增强机器人的稳定性、速度和敏捷性方面起着关键作用。目前,四足机器人的普遍结构变化包括仿生狗,[11]生物启发绵羊,[12]仿生大鼠,[13]仿生猫,[14]和仿生猎豹,[15]在其他例子中。四足机器人的基本结构通常包括身体、大腿、小腿和脚,如图 1 所示。四足机器人的特点是多自由度 (DoF),运动的动力源可分为液压驱动、电动驱动、气动驱动等。
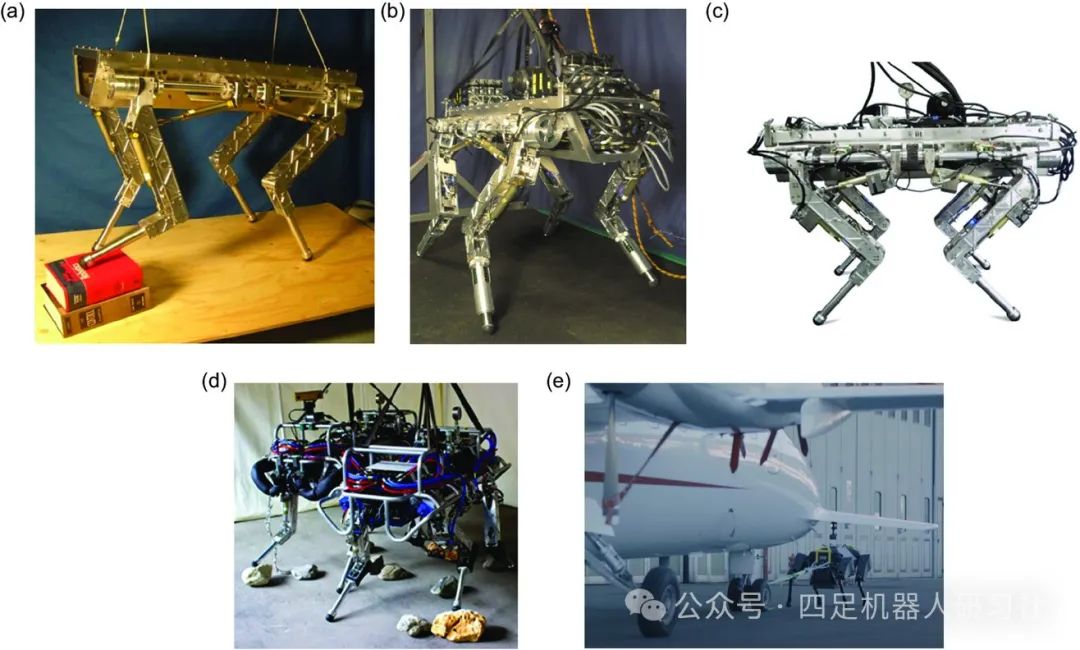
图1 四足机器人的结构。 |2.1驱动模式 |2.1.1液压驱动液压驱动采用流体(通常是液压油)来传递能量,通过液压缸和阀门调节液体的流量和压力,以促进关节运动。液压系统的基本原理依赖于充满液体的密封管道,利用压差产生力和运动。控制液压驱动的机器人需要监督液体流量、压力、阀门操作,并根据反馈信息调整流体的流量和压力,以实现所需的运动。 液压驱动的四足机器人具有更高的功率密度,这使它们能够产生巨大的驱动力和扭矩。因此,四足机器人可以承受更重的负载并穿越更复杂的地形。具有代表性的液压驱动四足机器人包括Big Dog、LS3、[16]以及波士顿动力公司开发的Wild Cat,以及意大利理工学院(IIT)制造的HyQ系列电液混合动力驱动四足机器人。这些机器人的特性如表1所示。 表 1. 几种液压驱动四足机器人的特点 特点/型号发展年驱动器类型特征应用示例图像大狗2005液压驱动负载能力高达 153 kg军事场景,[6]货物运输图2aLS3型[213]2009液压驱动负载能力高达 181 公斤。完成持续 24 小时并覆盖 32 公里的任务[46]军事场景图2b野猫2013液压驱动高速,室外实验室速度可达 32 km h−1[46]各种步态,如小跑、跳跃和跑步图2cHyQ V1.0/V1.1/V1.22010电液混合动力驱动高动态特性,[203]适应性执行跑步、单脚跳跃和跳跃等动作图 3a–cHyQ-蓝色2013电液混合动力驱动坚固性好,结构紧凑[218]复杂的地形图3dHyQ2 真实2015液压驱动高性能液压系统,优越的负载特性,动态性能,一体化结构[4]复杂的地形图3e
图2.波士顿动力公司的四足机器人。a) 大狗。b) LS3,[213]c) 野猫。[213]
HyQ系列四足机器人:a)HyQ V1.0, Claudio Semini;b) HyQ V1.1. SAGE Publications;c) HyQ V1.2;[215]d) HyQ-蓝;[216]e) HyQ2 Real。[217] 2008年,在中国国家863计划“十二五”重大工程的支持下,液压驱动四足机器人在中国启动研制。这些四足机器人表现出独特的特性和能力。例如,山东大学的SCalf四足机器人[17]是中国第一台能够高速小跑步态的液压驱动四足机器人。它可以穿越大约 150 毫米高的障碍物。上海交通大学小象四足机器人[18]可以在各种类型的地形上行走,最大负载为 100 公斤。北京理工大学研制出16自由度液压仿生四足机器人,[19]它能够执行各种灵活的运动。中国版的“大狗”四足机器人由北方车辆研究所开发,可以在不同类型的地形上导航,包括以30°的坡度行走,最高时速为6公里−1. 液压驱动的四足机器人可应用于军事、勘探、工业等领域。然而,由于液压驱动系统重量大、体积大、噪音水平高等缺点,它们在军事领域的应用仍然相对有限。目前正在努力开发轻巧高效的液压驱动四足机器人。未来,可能会出现更智能、更灵活的液压驱动四足机器人,能够适应广泛的场景和任务要求。 |2.1.2电机驱动电机驱动运动是通过调节电机的速度和扭矩来操纵关节运动的。通常,操作需要电池或替代电源。电机驱动机器人的控制涉及管理电机的速度、位置和电流。根据反馈信息对电机输出进行调整,以完成所需的运动。 与液压驱动的四足机器人相比,电动四足机器人具有体积更小、噪音更低、控制更方便等优点。电机驱动的四足机器人值得注意的例子包括麻省理工学院的MiniCheetah,苏黎世联邦理工学院的ANYmal和波士顿动力公司的SpotMini。此外,宇树科技的莱卡戈,以及中国浙江大学的“红兔”和“觉英”,都表现出令人印象深刻的运动能力。表2比较了这些四足机器人的性能参数。 表 2. 电动四足机器人性能比较 性能迷你猎豹ANYmalSpotMini的莱卡戈红兔珏英重量 [Kg]95025228040最大载荷 [Kg]20151455010最大步行速度 [Km h−1]8.823.613.323.8887耐久时间 [h]\21.53–4\2–4这些四足机器人中的每一个都有其独特的优势。MiniCheetah的特点是体重相对较轻,四肢具有灵活的弯曲能力,特别是成为第一个在没有视觉辅助的情况下实现后空翻的四足机器人。[20]ANYmal 专为在具有挑战性的环境中的自主操作而设计,具有出色的顺应性和精确的扭矩控制执行器驱动装置,可实现动态运动和高机动性,包括爬升能力。[21]ANYmal 的一个显着区别在于其支腿能够 360° 旋转并自由更改配置。SpotMini 在城市和工业环境中最突出的特点是它能够爬楼梯。它采用全面的视觉方案,创建全球地图并确定适当的立足点,从而避免地形的突然变化和立足点的不安全区域。[22]它也是世界上第一款安装机械臂的四足机器人,实现了稳定的控制。在机械设计方面,Laikago 从波士顿动力公司的 SpotMini 中汲取灵感。Laikago的高频响应运动性能的关键在于其无变速箱驱动器,其特点是体积小、结构轻、简单、扭矩控制可靠。这种设计方法大大降低了执行器的成本。配备 12 个轻巧紧凑的直驱电机,整个机器人可以在手提箱的尺寸内进行控制,总重量为 22 公斤。[23]“红兔”对各种复杂地形的适应性强,承载能力强,运行时运行安静。珏英掌握了多种能力,包括奔跑、跳跃、爬梯子、在碎石路上行走、自主蹲下和站立。当个体即将失去平衡时,他们会做出决定,并通过一系列动作迅速调整姿势,以保持稳定。[8] |2.1.3气体驱动气动驱动的四足机器人利用压缩空气或气体来驱动执行器,例如气缸或气动肌肉,通过控制气体压力来实现运动。气动机器人的控制包括管理气体压力和监控执行器的位置或力。气动系统的控制算法需要考虑气体的动态响应。 气动驱动具有制造成本低、设计轻、灵活性好等优点。然而,它面临着与控制精度低相关的挑战,使其难以实现高精度控制和低能耗。鉴于四足机器人应用场景复杂,对高动态响应和精度的需求,气动驱动的应用尚未普及。气动四足机器人具有低阻抗的特点,在行走过程中容易出现不必要的振荡行为。等等。[24]引进小型气动四足机器人(如图4a所示),并开发增益调度行走控制器。在站立阶段,气动驱动系统表现出高阻抗特性,而在摆动阶段,它表现出低阻抗特性,使机器人能够实现行走步态。Kim等人。[25]提出了一种将折纸泵执行器和软气动执行器联接的气动系统(如图4b所示)。气动驱动系统固有的灵活性使机器人能够执行更实际的任务,尽管合适的材料和制造设备会带来挑战。此外,气动驱动四足机器人结构的可扩展性受到限制。考虑到气动四足机器人的这些缺点,Park等人。[26]设计了双向运动和柔软充气关节的四足机器人(如图4c所示)。这种设计便于组装和拆卸,同时最大限度地减少了组件和材料的数量。
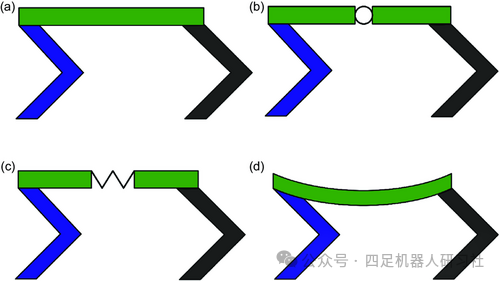
图4a)气动四足机器人模型。b) 基于折纸泵执行器的气动四足机器人。c)可扩展软致动的四足机器人。 |2.2身体结构四足机器人的身体是主要的支撑结构,类似于四足动物的躯干。它通常使用铝合金和碳纤维等材料制成,这些材料因其特定的强度和刚度特性而选择。通常在车身上安装各种传感器和控制设备,以实现自主行走和避障等功能。四足机器人的身体分为刚性和柔性结构,如图5所示。
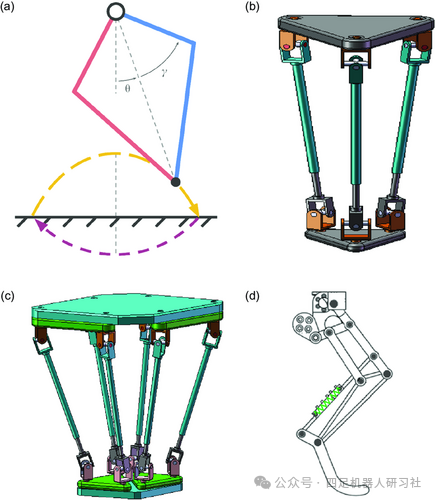
图5 身体类型:a)刚性的躯干;b)具有旋转关节的躯干;c) 带弹簧的躯干;d)柔性材料躯干。 |2.2.1刚性躯干 目前对四足机器人的研究主要集中在刚性躯干设计上。刚性躯干的特点是自由度数量较少,结构设计相对简单,灵活性和稳定性降低。因此,提高这种刚性躯干四足机器人的速度、稳定性和能源效率以优化其机车性能至关重要。最近的进展主要集中在驱动系统的优化、支腿设计和控制算法的选择上,以实现这些目标。Byeonghun Na 等人。[27]基于有刷直流电机的原理,设计了一种在机器人中实现高速运动的高速直线驱动系统,最高速度为1.07 m s−1.伊克巴尔等人。[28]提出了一种利用混合时变动力学模型的连续控制方法,实现了动态刚性平台上的稳定运动。Valsecchi 等人。[29]引入了新的高效执行器和低惯性支腿设计,以限制能耗并实现快速、敏捷的运动。虽然这些方法可以提高某些方面,例如刚性躯干四足机器人的速度、稳定性和能源效率,但它们在分散或吸收冲击力方面不如具有柔性躯干的机器人有效。先进的感知系统与智能控制策略的结合[30]具有增强机器人的地形适应性、负载能力和能源效率的潜力。然而,它也增加了系统的复杂性和功耗。 |2.2.2柔性躯干四足机器人的脊柱对增强其灵活性、稳定性和环境适应性有很大贡献。以前的研究主要集中在四足机器人的刚性躯干上,如图5a所示。在四足哺乳动物的运动中,脊柱在身体收缩和伸展中起着至关重要的作用,从而在一定程度上提高了跑步速度、稳定性和能量利用。在仿生四足机器人领域,可以通过增加躯干的自由度或使用柔性材料来增强灵活性和移动速度,如图5b-d所示。Khoramshahi 等人。[31]推出了一款名为Bobcat的四足机器人,其中躯干通过在矢状面上旋转的单个电机连接到机器人的前后部分。这种设计增加了后腿的有效长度,提高了步幅和移动速度,同时最大限度地减少了地面摩擦。相比之下,在被动模式下躯干中增加的景深,如山猫所见,不需要额外的控制或计算资源,简化了整体结构设计,提高了动态稳定性和运动速度。[32]为了优化密闭空间和有限尺寸的移动性,Shi 等人。[13]设计了具有 12 个活动自由度的 SQuRo 仿生大鼠四足机器人,其中两个在腰部。这种设计允许在狭窄空间内以小半径 (0.48 BL) 的急转弯灵活地弯曲车身。另一种方法是将弹簧结合到躯干中,这是实现灵活性的常用方法。灵活的躯干可有效减少地面力,增加步幅并提高运动速度。[33]相反,使用柔性材料设计躯干,同时增强地形适应性并扩大运动范围,则为机器人建模带来了复杂性。在实际应用中,柔性材料可能会遇到磨损和老化等问题,需要定期维护和更换,从而增加机器人的维护和时间成本。 |2.3腿部结构腿部结构是四足机器人的重要组成部分,其设计深刻影响了它们的运动性能。良好的结构设计可以减少腿部驱动冲击和腿部惯性大等问题,提高机器人的稳定性和机动性。根据腿部结构的不同形式,四足机器人的腿部结构大致可分为连杆腿和鳞片腿两种。 |2.3.1连杆腿结构连杆腿结构由多个铰链连杆组成,根据连接方式可分为串联、并联和混合型。串联型具有结构简单、运动范围大、控制简单等优点。相比之下,平行型具有刚度高、承载能力强、精度高、惯性低等优点。混合型结合了串联和平行结构的优点。众所周知,麻省理工学院的 MiniCheetah[34]和 Unitree Technology 的 A1[35]采用串联支腿结构。苏黎世联邦理工学院的 ANYmal 采用直接电机驱动关节,其中关节驱动单元集成了关节轴的驱动器、传感器和轴承。每条腿的膝关节都有偏置,确保所有关节都能360°旋转,在四足机器人中实现高机动性。[36] 斯坦福大学学生机器人俱乐部开发了斯坦福狗狗,这是一种低成本的开源四足机器人。该机器人由平面四连杆机构(如图6a所示)组成,具有非凡的跳跃能力。[37]Qi 等人。[38]分析了四足机器人的3-通用-棱镜-通用(3-UPU)和6-球形-棱柱-通用(6-SPU)平行腿机构的运动学性能(如图6b,c所示)。平行支腿的使用表明能耗降低,负载能力增强。Park等人。[39]受猫后腿骨和肌肉生理结构的启发,设计了一个由九个连杆和一个弹簧组成的单自由度腿机构,如图6d所示。配备这种创新腿部机构的机器人可以以 0.75 m s 的平均速度运行−1在平坦的地面上。猫式连杆机构实现了360°连续电机驱动。
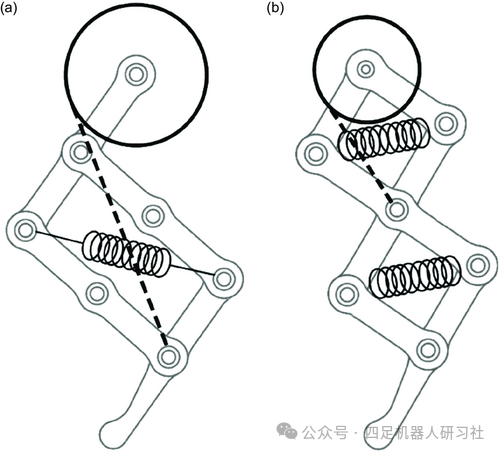
图6 四足机器人的平行和混合腿结构:a)平面四连杆机构。b) 3-UPU 并行机制。c) 6-SPU 并行机制。and d) 混合机制。 |2.3.2缩放腿结构与其他结构相比,缩放的支腿结构放大了驱动元件到末端执行器的位移,从而增加了机构的整体位移和更高的效率。受动物运动特征的启发,猎豹幼崽[40]和 Oncilla 机器人[40]利用弹簧受电弓 (SLP) 作为其腿部结构(如图 7a 所示)。SLP机构有效降低了腿部质量和惯性,但膝关节的较大伸展范围增加了机器人的重量。这可能会影响机器人在不平坦的地形中导航和抵抗地面干扰的能力。为了提高四足机器人的输出运动效率,Nizami等人。[41]提出了SLP机构的一种变体,称为弹性载荷剪刀机构(如图7b所示)。该机制放大了输入角度,以产生更大的膝关节输出位移。
图7 弹簧受电弓:a) 用于腿部结构的弹簧受电弓 (SLP)。b)弹性载荷剪刀机构。 综上所述,对各种支腿结构的分析表明,具有多个杆和众多可优化参数的连杆式支腿结构有利于实现多样化的支脚轨迹。这种设计有效地模拟了生物运动模式,并被普遍采用。然而,其有限的运动范围对控制算法提出了更高的要求。缩放的腿结构,动态调整腿长以适应不同的地形和任务,代表了最近机器人设计的创新趋势。这种结构依赖于精确的机械缩放机构,这增加了系统的整体成本和维护难度。缩放所需的额外机械部件可能会增加机器人的重量和体积,从而在一定程度上影响其整体性能和能源效率。 |2.4支腿拓扑结构四足机器人的移动性、可穿越性和奇异性由其拓扑结构决定。合适的拓扑结构是实现复杂环境下稳定灵活运动的基础。四足机器人的关节可分为两种结构形式:膝关节和肘关节。膝关节的特征是顶点面向向前运动的方向(俯仰),类似于人类的膝盖。相反,肘关节属于顶点与向前运动方向相反的关节,类似于人类的肘部。这些关节的不同配置导致了四足机器人的应用场景和运动能力的变化。 四足机器人的腿部拓扑结构大致可分为三种类型:类昆虫结构、爬行动物类结构和类哺乳动物结构,[42]如图 8-10 所示。类似昆虫和爬行动物的四足机器人具有较大的单腿工作空间,最大限度地减少了腿之间的干扰和接触。然而,它们的运动能力往往受到限制,其特征是静态步态。与类哺乳动物机器人相比,它们具有更好的静态稳定性,但保持身体平衡需要相对较大的关节扭矩。[43]仿真四足哺乳动物的仿生机器人具有较大的工作空间和强大的避障能力,在速度和动态性能方面表现出色。支腿结构主要在垂直平面上定向,具有很强的承载能力和对不同载荷的适应性。因此,对于需要重载能力和快速运动的四足机器人来说,这种拓扑结构更为合适。常见的类哺乳动物行走腿拓扑结构包括四种主要类型:全肘、全膝、前膝和后肘以及前肘和后膝。
图8 昆虫状结构。
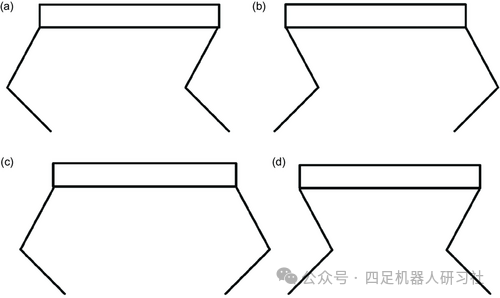
图10 类哺乳动物结构:a)全肘结构;b)全膝结构;c) 前膝-后-肘结构;d)前肘-后膝结构。 当遇到陡峭的斜坡、楼梯或其他复杂的地形时,前膝-后肘结构的前向膝经常会遇到与前方地形的干扰,导致腹部下方的空间减少并影响运动稳定性。[44]相比之下,全弯头配置解决了这个问题,使其适用于垂直障碍物或连续楼梯较低的室内或城市环境。因此,它被广泛应用于大多数中小型电动四足机器人中。[45]相反,与全肘部配置相呼应的全膝配置在实践中很少使用。前膝-后肘配置采用全对称排列。前腿的膝盖更适合攀爬垂直障碍物,避免对障碍物的干扰,适合户外环境。[46]前肘-后-膝结构与前膝-后肘结构形成鲜明对比,具有对称的形态,可有效减少因关节控制错误而导致的躯干质心波动。此外,其紧凑的结构使传感器更容易安装在脚上以检测地面障碍物。它被广泛用于Big Dog和HyQ等四足机器人。 |2.5足端结构四足机器人的足部设计通常采用圆柱形脚(包括半圆柱形脚)[47]和球形脚(包括半球形脚)。[48]圆柱形(或半圆柱形)脚是具有水平圆柱形或半圆柱形的四足机器人的脚。当与地面接触时,形成一个矩形平面。[49]目前,圆形脚端是四足机器人最普遍的设计,具有球形或半球形。这种设计使机器人的脚可以从各个方向与地面接触,增强其对不同环境的适应性。然而,当面对障碍物、斜坡或不平坦的地形时,扁平足或球形足的四足机器人可能会有跌倒的风险或在穿越地形时遇到困难。此外,传统的足部结构通常缺乏传感系统,无法提供有关环境以及足部与周围环境之间相互作用的信息。这进一步限制了四足机器人在复杂环境中的适应性。卡塔拉诺等人。[50]提出了一种铰接式自适应足,并对ANYmal四足机器人进行了测试和实验。真正的四足动物有不规则的脚,有爪子和肉垫等结构,在与地面接触时提供牢固的抓地力。然而,对仿生足部结构的研究仍然不足。众所周知,蜥蜴的身体非常灵活柔软,可以在垂直的墙壁上敏捷地移动。受蜥蜴的启发,Nishad 等人。[51]设计了仿生蜥蜴四足机器人,每条腿都有附着力和剥离机制,模仿真实蜥蜴的脚趾和爪子。一些四足机器人设计有独特的脚部结构来完成特定的任务。胡克斯等人。[52]在机器人脚下安装了带有无源自由度的末端执行器,以完成拣选任务。用于多功能和快速运动 (MARVEL) 的四足机器人磁粘性机器人的脚端集成了电磁性弹性体和磁流变弹性体,可提供增强的附着力和牵引力。这使得机器人可以在各种表面上快速移动,包括墙壁、地板和天花板。[53]四足机器人脚通常由弹性材料制成,如橡胶和海绵。然而,传统材料往往难以同时满足高摩擦系数、强减震和坚固柔韧性的要求。因此,新材料在四足机器人脚设计中的应用将增强这些机器人的环境适应性。使用特殊材料,如仿生壁虎脚端材料,可以使四足机器人在更复杂的环境中导航。 未完待续。。。。。 参考: [1]Fan, Y., Pei, Z., Wang, C., Li, M., Tang, Z., & Liu, Q. A Review of Quadruped Robots: Structure, Control, and Autonomous Motion. Advanced Intelligent Systems, 2300783. https://doi.org/10.1002/aisy.202300783 原文链接:A Review of Quadruped Robots: Structure, Control, and Autonomous Motion - Fan - Advanced Intelligent Systems - Wiley Online Library |



【本文地址】