| dh参数逆运动学 | 您所在的位置:网站首页 › 机器人学导论第二版课后答案解析 › dh参数逆运动学 |
dh参数逆运动学
|
第四章 操作臂逆运动学---练习(仅作有课后答案的以及Matlab练习)
一、习题 练习4.14
解答: 否。Pieper的方法给出了任何3自由度操作臂封闭性形式的解。 练习4.18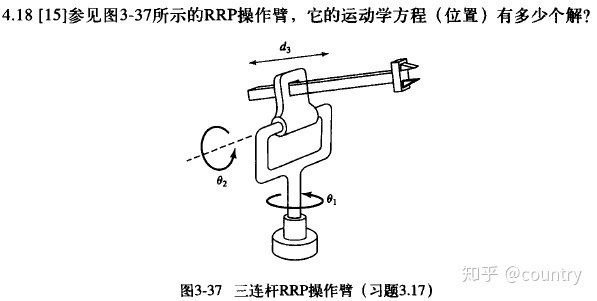
解答: 2种,实际上是球坐标(没想出来) 练习4.22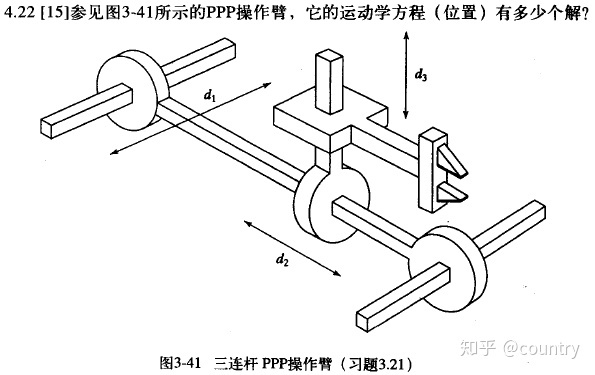
解答: 1种,笛卡尔坐标系 MATLAB练习(这个例子可以好好理解,理解了运动学就掌握了)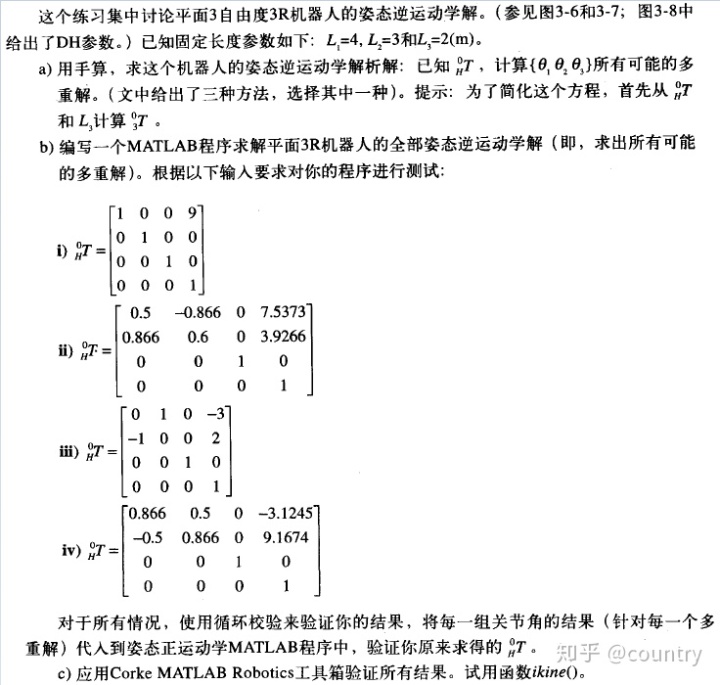
解题代码: %% 输入齐次变量矩阵TH0 GD = [1 0 0 9 0 1 0 0 0 0 1 0 0 0 0 1]; % GD = [0.5 -0.866 0 7.5373 % 0.866 0.6 0 3.9266 % 0 0 1 0 % 0 0 0 1]; % GD = [ 0 1 0 -3 % -1 0 0 2 % 0 0 1 0 % 0 0 0 1]; % GD = [ 0.866 0.5 0 -3.1245 % -0.5 0.866 0 9.1674 % 0 0 1 0 % 0 0 0 1]; %% 定义符号变量 syms L1 L2 L3 theta1 theta2 theta3 x y c1 s1; %% 正向运动学 L(1) = Link([theta1 0 0 0 0],'modified'); L(2) = Link([theta2 0 4 0 0],'modified'); L(3) = Link([theta3 0 3 0 0],'modified'); L(4) = Link([0 0 2 0 1],'modified');%工具坐标{T} %% 初始化变量 L1=4;L2=3;L3=2; %% TH3矩阵 TH3 = [1 0 0 2 0 1 0 0 0 0 1 0 0 0 0 1]; % Check input size if ~isequal(size(GD), [4,4]) msg ='Wrong input format, must be a 4x4 matrix'; error(msg); end gd = GD*(TH3^-1); %% DH parameters %一般需要输入D-H参数,本题无变量,故省略 %% Calculating theta2 x = gd(1,4); y = gd(2,4); c1 = gd(1,1); s1 = gd(2,1); c2 = (x^2 + y^2 - 4^2 - 3^2)/(2*4*3); %Check whether the target exceeds the limit if c21 msg ='the target exceeds the limit'; error(msg); end s2P = sqrt(1-c2^2); s2N = -sqrt(1-c2^2); theta2P = atan2(s2P,c2); theta2N = atan2(s2N,c2); %% Calculating theta1 k1P = 4 + 3 * cos(theta2P); k2P = 4 * sin(theta2P); theta1P = atan2(y,x) - atan2(k2P,k1P); % k1N = 4 + (3 * cos(theta2N)); k2N = 4 * sin(theta2N); theta1N = atan2(y,x) - atan2(k2N,k1N); % Calculating theta3 theta3P = atan2(s1,c1) - theta2P - theta1P; theta3N = atan2(s1,c1) - theta2N - theta1N; %% Output of result in the form of 'deg' K1P = theta1P*180/pi; K2P = theta2P*180/pi; K3P = theta3P*180/pi; K1N = theta1N*180/pi; K2N = theta2N*180/pi; K3N = theta3N*180/pi; result1 = [K1P,K2P,K3P,0] result2 = [K1N,K2N,K3N,0] %% Recheck digits(4);%设置只保留小数点后4位 T1 = L(1).A(theta1P)*L(2).A(theta2P)*L(3).A(theta3P)*L(4).A(0)%此时为分数 T2 = L(1).A(theta1N)*L(2).A(theta2N)*L(3).A(theta3N)*L(4).A(0) A1 = vpa(T1)%变换为小数输出 A2 = vpa(T2)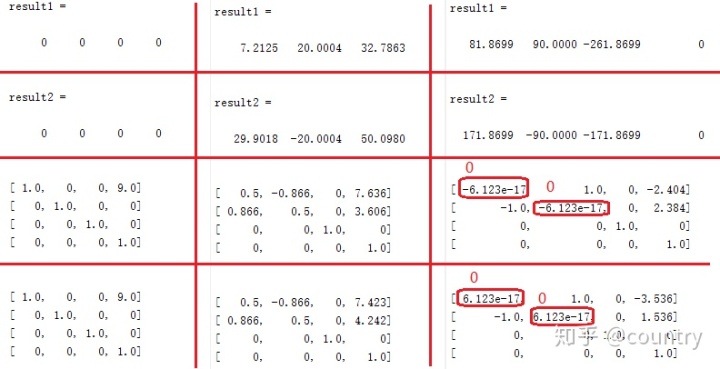
注意:最后一个矩阵超出范围了 
结束 涉及函数 error(msg) %用于输出错误提示 vpa() %将分数形式转换为小数形式 digits(4) %设置只保留小数点后4位 注意:ikine()方法仅适用于standard D-H,modified D-H不支持 |
【本文地址】
公司简介
联系我们