| 直流无刷电机的工作原理 | 您所在的位置:网站首页 › 无刷电机工作原理动画 › 直流无刷电机的工作原理 |
直流无刷电机的工作原理
2019年8月26日by 吴川斌0 Comments直流无刷电机的工作原理 电机将供应的电能转换为机械能。常用的电机类型很多,其中,无刷直流电机(BLDC)因为高效率及优异的可控性,而广泛用于各种应用中。相对于其他类型的电机,BLDC电机具有省电的优势。
当工程师面临设计电气设备以执行机械工作的挑战时,可能会思考如何将电信号转换为动能。而驱动器及电机就是能将电信号转换为运动的装置,使加诸于电机上的电能转换为机械能。
常见的电机类型
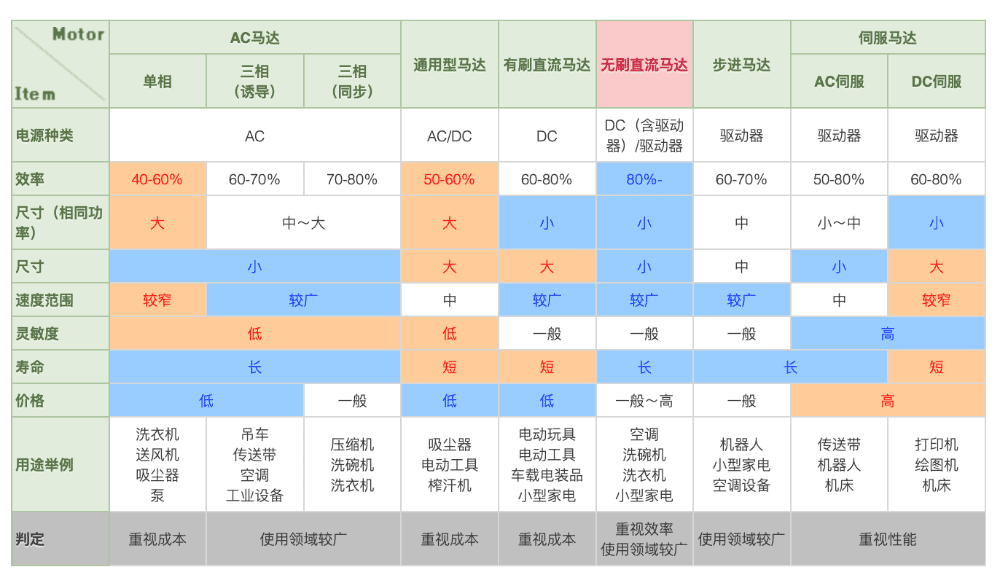
有刷电机工作示意图 电机类型以电源类型(交流或直流)及其产生旋转的方法(如上图所示)而有所不同。以下将简要说明各类电机的特性及用途。
另外一个经常使用的术语是 PMSM,其中文全称是“永久磁铁型同步电机”。这里的“永久磁铁”用于与其他同步电机进行区分:其他同步电机依靠转子上的励磁绕组运转,而 BLDC 则处于永久励磁状态。换而言之,即使不给定子通电,电机转子也会通过永久磁铁产生磁场。 为了用于区分带有正弦感应电压(反电动势)的 PMSM 电机和带梯形感应电压的 BLDC 电机(见下文),PMSM 和 BLDC 这两个术语通常会并列出现。现在的大多数 BLDC 电机都具有正弦反电动势。 无刷电机的结构/类型 大部分 BLDC 电机是“内转子电机”,其定子带有线圈,固定不动;中间的转子则在转轴上永久磁铁的作用下旋转。而在“外转子电机”中,定子位于内侧,转子包括一个在外部旋转的钟形外壳,磁体安装在该外壳上。 内转子电机的优势在于转子的转动惯量低,散热非常快。相反,在外转子电机中,由于存在转子外壳和磁体,发热线圈与环境隔绝,散热相对较慢。由于转子的转动惯量转矩很大且很难控制转子外壳的平衡,所以外转子电机不适用于旋转速度很高的模式。 因此,内转子电机在大多数工业应用中广泛使用。外转子电机在大批量生产应用中具有较大优势,因为这种模式可以降低生产成本。外转子电机也可以拥有更短的结构并通常具备更小的齿槽转矩,而由于在相同的磁力下,它的转子直径更大,因此其转矩也更大。 这两种电机通常都设计成三相电机。不过,也有使用单相或两相的设计。在下文中,将只研究三相 BLDC 电机,因为 Nanotec 只生产三相电机产品。 内转子电机和外转子电机均使用齿槽绕组,绕组线缠绕在定子极靴上(铁芯),这样绕组的磁场线就可以流出并汇聚成确定形状。为了让涡流的电流损失降至最低,定子由相互抵消的薄绝缘金属板制成。 对非常小的电机来说,内转子中一种非常重要的特殊设计形式就是无齿槽 BLDC 电机。它们的定子仅由环状金属片构成,内部附着一个粘连或封装的扁平绕组。因为没有铁芯,电机的电感非常低,而且绕组的电流增长非常快。此外,铁损大幅减少,所以电机具有更高的效率等级。在慢速运行中,缺少转矩波动可以带来正面效应。与标准 BLDC 电机不同,极靴的磁场没有增强,因此没有齿槽转矩。这种设计类型对直径小于 40 mm 的电机来说非常重要,因为其功率密度相比有齿槽电机大幅提升。这是由于,因为生产关系,有齿槽电机中绕组之间有很大部分的定子都是空的。而在无齿槽电机中,这个安装空间可以完全填满铜绕组。电机的直径越小,无齿槽电机展现出来的优势就越大。
外转子电机
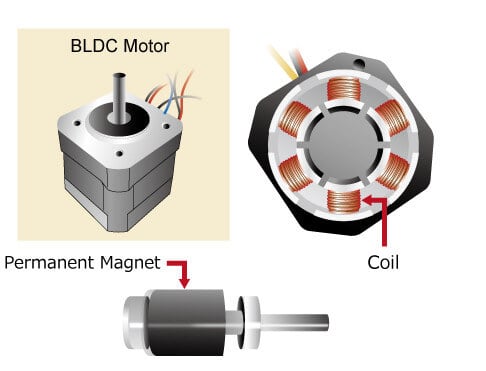
无齿槽-BLDC-电机 BLDC电机是如何驱动的?
顾名思义,无刷直流电机不使用电刷。若为有刷电机,电刷透过换向器将电流送入转子上的线圈内。那么无刷电机如何将电流传递至转子线圈?不需要,因为线圈不在转子上。相反的,转子是一个永久磁铁,线圈不会旋转,而是固定在定子上。因为线圈固定不动,故不需要电刷及换向器。
直流无刷电机的内部及外侧 转子为永久磁铁,不会有电流通过。不需要碳刷及整流子,因此使用寿命更长。 上图所示为一种典型的直流无刷电机──内转子型的外观及内部结构。应注意的是此电机的永久磁铁安装在转子上,而线圈位于外侧。这与线圈在转子上而永久磁铁在外侧的典型有刷直流电机完全不同。由于直流无刷电机的转子不使用线圈,故不需为其提供电流,这也是没有碳刷的原因。
直流无刷电机比有刷电机更难驱动。若为有刷电机,只需将电源连接至电机的正负极导线即可。但直流无刷电机的导线数量与有刷电机不同,连接较为复杂。
控制磁场
图2-A:直流无刷电机旋转原理 典型配置:三个间隔120º的线圈。藉由控制相位及线圈电流驱动。 欲使直流无刷电机旋转,需要知道电流进入线圈的方向及时机。图2(a) 说明直流无刷电机的定子(线圈)及转子(永久磁铁)。我们将利用此图说明如何使转子旋转。在此例中将使用三个线圈,但实务上较普遍的做法为使用六个或更多线圈。但在此仅使用三个间隔120º的线圈。如上一节所述,电机负责将电能转换为机械能。那么图示中的电机是怎么做到的?我们来看看内部的情况。
在我们的范例中展示一个三线圈绕阻的三相电机。分别将线圈标示为U、V及W。记住,电流通过线圈会产生磁场。由于有三个线圈,故有三条可通过电流的路径,分别称为U相(电流进入U线圈)、V相(进入V线圈)及W相。先来看U相。若电流只通过U相,则产生的磁通量如图2(b)箭头所示。实际上,所有三个线圈是透过来自各线圈的一条导线相连,并且不可能单独产生U相。图2(c)显示电流通过U及W线圈(相位「U及W」)时的情况,同样以箭头表示各线圈产生的磁通量。图2(d)中的宽箭头为合成通量,即结合U与W磁场合成后的结果。此大的磁通量将导致内部转子旋转,直到转子永久磁铁的S和N极与此箭头对齐(N极最接近箭头尖端)。
图2-B:直流无刷电机旋转原理 电流先通过U再通过W。箭头显示线圈U产生的磁通量。 图2-C:直流无刷电机旋转原理 电流通过U及W。两个箭头分别表示线圈U及W产生的磁通量。
图2-D:直流无刷电机旋转原理 宽箭头表示合成磁通量──U及W产生的磁通量之和。 藉由持续切换磁通量使永久磁铁不断追逐线圈产生的旋转磁场,维持旋转。换句话说,必须连续切换使U、V及W通电,保持合成磁通量移动,才能产生能持续拉动转子磁铁的旋转磁场。
图3显示通电相位与磁通量之间的关系。如图所示,依序从模式1切换至模式6将使转子以顺时针旋转一圈。可藉由控制相位变化的速度控制转速。我们将此处所述之6种模式控制法称为「120度方波控制」。
图3:不断变化的合成磁通量持续拉动转子磁铁,使转子以同样的速度旋转。 正弦控制提供平顺的旋转
利用120度方波控制,只有六个合成磁通量方向用以驱动电机。举例来说,从模式1切换至模式2(参见图3)使合成磁通量方向移动60º,进而拉动转子。从模式2切换至模式3使磁通量方向再移动60º,并再次拉动转子。重复此过程以驱动直流无刷电机,但这样的驱动方式则会产生对应的转矩涟波。在部分情况下,此涟波会造成不必要的振动与机械噪音。
替代120度方波控制的方法,是利用正弦控制实现更平顺且更安静的操作。若是120度方波控制,连续循环通过六个固定的合成通量(如图2(c)所示)会产生同样大小的磁通量。但藉由更谨慎的控制进入U、V及W的电流,可在各线圈产生不同的磁通量大小,能更准确的改变合成磁通量。 (参见图4。)
藉由精确调整进入三相中各相的电流,即能达到更连续的合成磁通量变化,进而使电机旋转更平顺。
图4:正弦控制 藉由控制进入所有三相的电流,即能比120度方波控制达到更精准控制合成磁通量的大小及方向,以实现更平顺的旋转磁场。合成磁通量不再限于六个不连续的方向。 以变频器控制
让我们再次检视进入U、V及W之电流的性质。为求简单,仅以120度方波控制说明运作原理。回到图3,可看到在模式1中电流从U进入W,在模式2中从U进入V。如图中箭头所示,每次通电线圈组合的变化都会导致磁通量方向相应改变。
现在来看模式4。此时电流从W进入V,刚好与模式1相反。若为有刷直流电机,则可藉由碳刷与整流子达到此等电流反转。按照定义,直流无刷电机无法使用碳刷或其他机械接触实现此等反转。相反的,一般是使用变频器电路进行此控制。
而且使用变频器电路亦可调整进入各线圈的电压,因此还能控制电流的大小。调整电压的典型方式为透过脉冲宽度调变(PWM)。在此方式中,藉由延长或缩短脉冲导通(ON)时间(亦称为「责任周期」:导通时间以导通(ON)+断开(OFF)切换间隔比率表示)改变电压。增加责任周期具有与提高电压相同的效果,减少责任周期则具有与降低电流相同的效果。 (参见图5。)
可使用配有备专门硬体的MPU实现PWM输出。 120度方波控制仅需要控制两相电压,在软体中即可相对容易的实现;但正弦控制是使用三相电压控制,控制上较为复杂。因此,需要适当的变频器电路以驱动直流无刷电机。应注意,变频器亦可与交流电机搭配使用。但在消费性电子产品中使用的「变频器类型」一词,通常是指直流无刷电机。
图5:PWM输出vs.输出电压 改变责任周期(各切换周期内的接通时间)会改变有效电压。 直流无刷电机及位置感测器 如前所述,藉由持续改线圈产生之磁通量的方向性,驱动直流无刷电机。转子上的永久磁铁以相同的速度不断追逐移动的旋转磁场,造成转子旋转。 但到目前为止都还没提到控制这些电机另一个重要因子:位置。由于直流无刷电机控制必须与转子(磁铁)位置协调,因此这些电机一般都会带有包含侦测位置的位置感测器。在不知道转子位置的情况下施加电流,可能会导致转子旋转方向错误。使用位置感测器即可防止此等问题。 表1显示这些电机中常用的位置感测器类型。不同的控制方法使用不同的感测器类型。讯号输入间隔60º的霍尔元件(Hall elements)最适合采用120度方波控制的电机,在此情况下唯一要做的就是决定通电的相位。更精准的感测器,例如解角器(resolvers)及光学编码器,更适合采用向量控制(说明如下)、更精细的控制电机内的磁通量。 虽然感测器具有明显优势,但亦有其缺点。有些感测器对灰尘的耐受性非常低,而且需要定期维护。有些只能在有限的温度范围内正常运作。使用感测器及建置所有伴随电路会增加制造成本,而高精度感测器当然也最昂贵。目前市面上的「无感测器直流无刷电机」完全不需使用感测器,是降低零件及维护成本的一种方式。但本节旨在说明操作原理,故假设使用感测器以追踪转子位置。 感测器类型 典型应用 特性 霍尔元件 120度方波控制 每60度取得一次信号。相对便宜。耐热性不佳。 光学编码器 正弦波控制、向量控制 两类:增量型(侦测距离与原点的位移)及绝对型(侦测当前位置)。高解析度。灰尘耐受性不佳。 解角器 正弦波控制、向量控制 高解析度。坚固。可用于严苛的环境。向量控制维持高效率 如前所述,正弦控制利用三相电流平顺的控制磁通量,以实现平顺的旋转。而120度方波控制在任一时间点仅使三相(U、V及W)中的两相通电,正弦控制明显更为复杂,因其必须准确提供不同的电流量至全部三个相位。 降低此复杂性的一个方法是向量控制,利用计算转换座标空间,将三相交流值视为两相直流值处理。但此方法仅适用于能提供高解析度位置资讯之情况,以供计算使用。取得此资讯的一个方法是使用高精度感测器(光学编码器、解角器等)。另一种「无感测器」法是依据进入各相之电流的大小预测位置。不论何种方式,转换座标空间可直接控制与扭力有关的电流以实现高效率操作,几乎不会浪费电流。 实现向量控制需要密集的数学运算,包括快速求解转换座标转算所需要的三角函数能力。用以控制这些电机的MCU通常包含FPU(浮点运算单元),必须要能提供强大与即时的运算能力。 本文老wu整理自瑞萨电子: https://www.renesas.com/tw/zh/support/technical-resources/engineer-school-tw/brushless-dc-motor-01-overview-tw.html 以及纳诺达克电子: https://www.nanotec-cn.cn/products/156-brushless-dc-motors/ 阅读: 4,891 wechat 硬件2842118 Likes Twitter Facebook Pinterest Linkedin |
 有刷直流电机是最简单的一种电机。在这种电机中,电流通过放置在固定磁场内的线圈时,于线圈周围产生磁场,由于每个线圈都被固定磁场的同性磁极推开并受到异性磁极的吸引,使线圈组件旋转。为保持旋转状态,必须使电流不断的反向,让线圈的极性连续翻转,使线圈不断「追逐」异性的固定磁极。藉由使固定的导电刷与旋转的换向器(commutator)接触,供电给线圈,而换向器的旋转造成了通过线圈的反向电流。换向器及电刷是区别有刷直流电机与其他种类电机的关键元件。
有刷直流电机设计简单且容易控制,广泛用于打开与闭合光碟托盘。在汽车中,经常用以降下、升起及定位电动车窗。这些电机成本低,故适合许多应用。但缺点是电刷及换向器因为持续接触而容易较快磨耗,需要频繁更换及定期维护。
步进电机由脉冲驱动,随着每一个脉冲旋转至特定的角度(步进)。由于以接收到的脉冲数量准确地控制旋转,这些电机广泛用于位置调整。举例来说,其经常用于传真机和印表机的进纸控制,因为这些装置按照固定的段数进纸,能轻松地关联至脉冲计数。而由于电机会在脉冲讯号中断后立即停止旋转,故亦能轻松进行暂停控制。
由于同步电机的旋转频率与供应的电流频率相同。这类电机经常用于驱动微波炉内的转盘,利用电机单元中的减速机取得适当的转速来加热食物。然而感应电机的转速亦会随频率而改变,但并非同步移动。这种电机过去经常用于电风扇和洗衣机内。
还有许多常用的电机类型。
有刷直流电机是最简单的一种电机。在这种电机中,电流通过放置在固定磁场内的线圈时,于线圈周围产生磁场,由于每个线圈都被固定磁场的同性磁极推开并受到异性磁极的吸引,使线圈组件旋转。为保持旋转状态,必须使电流不断的反向,让线圈的极性连续翻转,使线圈不断「追逐」异性的固定磁极。藉由使固定的导电刷与旋转的换向器(commutator)接触,供电给线圈,而换向器的旋转造成了通过线圈的反向电流。换向器及电刷是区别有刷直流电机与其他种类电机的关键元件。
有刷直流电机设计简单且容易控制,广泛用于打开与闭合光碟托盘。在汽车中,经常用以降下、升起及定位电动车窗。这些电机成本低,故适合许多应用。但缺点是电刷及换向器因为持续接触而容易较快磨耗,需要频繁更换及定期维护。
步进电机由脉冲驱动,随着每一个脉冲旋转至特定的角度(步进)。由于以接收到的脉冲数量准确地控制旋转,这些电机广泛用于位置调整。举例来说,其经常用于传真机和印表机的进纸控制,因为这些装置按照固定的段数进纸,能轻松地关联至脉冲计数。而由于电机会在脉冲讯号中断后立即停止旋转,故亦能轻松进行暂停控制。
由于同步电机的旋转频率与供应的电流频率相同。这类电机经常用于驱动微波炉内的转盘,利用电机单元中的减速机取得适当的转速来加热食物。然而感应电机的转速亦会随频率而改变,但并非同步移动。这种电机过去经常用于电风扇和洗衣机内。
还有许多常用的电机类型。
 直流无刷电机(简称为 BLDC 电机)——虽然挂着“直流”的名号——实际上是一种三相电流同步电机:转子跟随旋转磁场运转,其运动与施加在绕组上的交流电压同步。 这种电机类型之所以通常被称为“无刷直流电机”是因为,在许多应用中,该电机可以替换有刷直流电机(有刷直流或换向器式电机)。在有刷直流电机中,施加直流电压后,电机中的机械逆变器(电刷)会产生与转速无关的交流电。
配合电子驱动控制器(取代电刷的功能并将馈入的直流电转换为交流电),BLDC 电机可以实现与有刷直流电机相当的性能,而无需使用寿命有限的电刷。 因此,BLDC 电机也被称为 EC(电子换向)电机,以便与包含电刷的机械换向电机进行区分。
直流无刷电机(简称为 BLDC 电机)——虽然挂着“直流”的名号——实际上是一种三相电流同步电机:转子跟随旋转磁场运转,其运动与施加在绕组上的交流电压同步。 这种电机类型之所以通常被称为“无刷直流电机”是因为,在许多应用中,该电机可以替换有刷直流电机(有刷直流或换向器式电机)。在有刷直流电机中,施加直流电压后,电机中的机械逆变器(电刷)会产生与转速无关的交流电。
配合电子驱动控制器(取代电刷的功能并将馈入的直流电转换为交流电),BLDC 电机可以实现与有刷直流电机相当的性能,而无需使用寿命有限的电刷。 因此,BLDC 电机也被称为 EC(电子换向)电机,以便与包含电刷的机械换向电机进行区分。 内转子电机
内转子电机

 有刷电机是藉由控制转子上线圈产生的磁场进行旋转,但静止磁铁产生的磁场是固定不变。如欲改变转速,需改变线圈的电压。若为BLDC电机,是永久磁铁在旋转,藉由改变周围固定线圈产生的磁场方向,使其旋转。如欲控制旋转,需调整进入线圈的电流大小及方向。
BLDC电机的优点
在定子上有三个线圈的BLDC电机,会有六条从这些线圈延伸出的电线(每个线圈两条)。大部分的使用方式为将其中三条导线在内部连接,而另外三条导线则从电机本体拉出(不像前述有两条导线从有刷电机拉出)。在BLDC电机壳体内接线比单纯连接电池的正极和负极要复杂,将于本系列第二节中详细说明此等电机的工作原理。以下将说明BLDC电机的优点并进行总结。
效率是其中的一大优势,因为这些电机可持续控制在最大旋转力(扭力)上。相反的,有刷电机旋转时只有在特定位置才能达到最大扭力。有刷电机若要能提供与无刷电机相同的扭力,必须使用更大的磁铁,这就是即使小型BLDC电机仍能提供大功率的原因。
与第一项有关的第二项优势在于可控性。利用反馈机制,可控制BLDC电机精准地提供所需要的扭力及转速。另一方面,精准控制可降低能耗及温升,若电机由电池供电,则可延长电池寿命。
而且因为没有电刷,BLDC电机还具备高耐用性且产生的电气杂讯(electric noise)极低。若为有刷电机,电刷及换向器会因为持续移动接触而磨耗,并在接触时产生火花。其中,电气杂讯就是电刷通过换向器间隙时容易发生之强烈火花的结果。这也是在必须避免电气杂讯的应用中,经常优先选用BLDC电机的原因。
BLDC电机理想的应用场合
我们已经知道BLDC电机能提供高效率、可控性,而且具有较长的使用寿命。那有什么应用较为合适呢?因为高效率且长寿,使其广泛用于连续运转的装置中。像是洗衣机、空调及其他消费性电子产品,因其高效率有助于大幅降低功耗,近年来也用在风扇上,吸尘器的驱动也是用BLDC电机来达成。只需要变更控制的方法,即可大幅提高电机的转速,这是BLDC电机绝佳可控性的一个实例。
BLDC电机也用于硬碟的驱动,在此情况下,其耐用性使硬碟机能长时间可靠运作,同时其能源转换效率亦有助于在降低,在能耗变得日益重要的领域中达成此目标。
未来的应用更宽广
我们预期未来将可看到更多BLDC电机的应用。例如:可能将广泛地用于驱动服务型机器人,即在制造领域之外提供服务的机器人。有些人可能认为步进电机较适合此等应用,因为能利用脉冲精准地控制位置。但BLDC更适合用以控制力道。使用步进电机,若要使机械手臂固定在定点位置上,通常需要较大且连续的电流来维持。
若使用BLDC电机,所需要的不过是与外力成比例的电流,进而进行更高能源转换效率的控制。 BLDC电机亦可取代高尔夫球车及代步车内的有刷直流电机。除更高的效率外,BLDC电机亦能实现更精准的控制,因而进一步延长电池寿命。
BLDC电机也非常适合无人机的应用。精准控制的能力使其特别适合多旋翼无人机,因为必须藉由精准控制每个旋翼的转速,才能控制无人机的姿态。
BLDC直流无刷电机的控制
连接更为复杂
有刷电机是藉由控制转子上线圈产生的磁场进行旋转,但静止磁铁产生的磁场是固定不变。如欲改变转速,需改变线圈的电压。若为BLDC电机,是永久磁铁在旋转,藉由改变周围固定线圈产生的磁场方向,使其旋转。如欲控制旋转,需调整进入线圈的电流大小及方向。
BLDC电机的优点
在定子上有三个线圈的BLDC电机,会有六条从这些线圈延伸出的电线(每个线圈两条)。大部分的使用方式为将其中三条导线在内部连接,而另外三条导线则从电机本体拉出(不像前述有两条导线从有刷电机拉出)。在BLDC电机壳体内接线比单纯连接电池的正极和负极要复杂,将于本系列第二节中详细说明此等电机的工作原理。以下将说明BLDC电机的优点并进行总结。
效率是其中的一大优势,因为这些电机可持续控制在最大旋转力(扭力)上。相反的,有刷电机旋转时只有在特定位置才能达到最大扭力。有刷电机若要能提供与无刷电机相同的扭力,必须使用更大的磁铁,这就是即使小型BLDC电机仍能提供大功率的原因。
与第一项有关的第二项优势在于可控性。利用反馈机制,可控制BLDC电机精准地提供所需要的扭力及转速。另一方面,精准控制可降低能耗及温升,若电机由电池供电,则可延长电池寿命。
而且因为没有电刷,BLDC电机还具备高耐用性且产生的电气杂讯(electric noise)极低。若为有刷电机,电刷及换向器会因为持续移动接触而磨耗,并在接触时产生火花。其中,电气杂讯就是电刷通过换向器间隙时容易发生之强烈火花的结果。这也是在必须避免电气杂讯的应用中,经常优先选用BLDC电机的原因。
BLDC电机理想的应用场合
我们已经知道BLDC电机能提供高效率、可控性,而且具有较长的使用寿命。那有什么应用较为合适呢?因为高效率且长寿,使其广泛用于连续运转的装置中。像是洗衣机、空调及其他消费性电子产品,因其高效率有助于大幅降低功耗,近年来也用在风扇上,吸尘器的驱动也是用BLDC电机来达成。只需要变更控制的方法,即可大幅提高电机的转速,这是BLDC电机绝佳可控性的一个实例。
BLDC电机也用于硬碟的驱动,在此情况下,其耐用性使硬碟机能长时间可靠运作,同时其能源转换效率亦有助于在降低,在能耗变得日益重要的领域中达成此目标。
未来的应用更宽广
我们预期未来将可看到更多BLDC电机的应用。例如:可能将广泛地用于驱动服务型机器人,即在制造领域之外提供服务的机器人。有些人可能认为步进电机较适合此等应用,因为能利用脉冲精准地控制位置。但BLDC更适合用以控制力道。使用步进电机,若要使机械手臂固定在定点位置上,通常需要较大且连续的电流来维持。
若使用BLDC电机,所需要的不过是与外力成比例的电流,进而进行更高能源转换效率的控制。 BLDC电机亦可取代高尔夫球车及代步车内的有刷直流电机。除更高的效率外,BLDC电机亦能实现更精准的控制,因而进一步延长电池寿命。
BLDC电机也非常适合无人机的应用。精准控制的能力使其特别适合多旋翼无人机,因为必须藉由精准控制每个旋翼的转速,才能控制无人机的姿态。
BLDC直流无刷电机的控制
连接更为复杂





【本文地址】