| 新基建|无人值守自动停机坪系统 | 您所在的位置:网站首页 › 无人机降落平台是什么东西 › 新基建|无人值守自动停机坪系统 |
新基建|无人值守自动停机坪系统
|
舱盖主要用来防护;
升降台是飞机停泊的平台,升起时用来做飞机起飞和降落,降下时,用来收纳飞机;
无人机扶正机构则可以在无人机降落位置有所偏差时,将飞机推到正确的位置,供机械手操作;
机械手主要用来给飞机装电池和卸电池的;
充电器主要用来给换下来的电池自动充电;
停机坪上面安装了3个摄像头,一个位于升降台上,用于辅助无人机精准降落,一个位于停机坪内部,用于观察各部件工作状态,一个位于停机坪周边,用于监测停机坪整体工作状态;
停机坪内部安装有传感器,如温湿度、电压、电流、烟感、 位置传感器等,可以实时监测工作状态;
3)外环境感知系统 环境监测传感器:风速、风向、雨淋、温度、湿度、光照。外置摄像头:用来监控停机坪外部结构、环境、飞机起降情况等。应急灯:可以通过后台软件打开或者关闭,用来做夜间维护、防盗、应急照明等。天线:无人机于停机坪通讯用。
4)后台控制中心 后台控制中心通过阿里云与停机坪、无人机进行通讯,可以实时收到无人机通过4G网络回传的图像和状态数据,也可以收到停机坪通过光纤传输的3路视频信号和传感器数据;后台控制中心可以远程发送指令给停机坪,操作其打开或关闭舱门,升起或降下升降台,命令机械性更换电池,辅助无人机等。也可以远程控制无人机自动起飞,自动降落,规划航线,执行航线, 调整云台,拍照录像,精准降落等。
此外,后台控制中心可以接麦克风和操作摇杆远程对无人机进行实时控制和远程喊话。
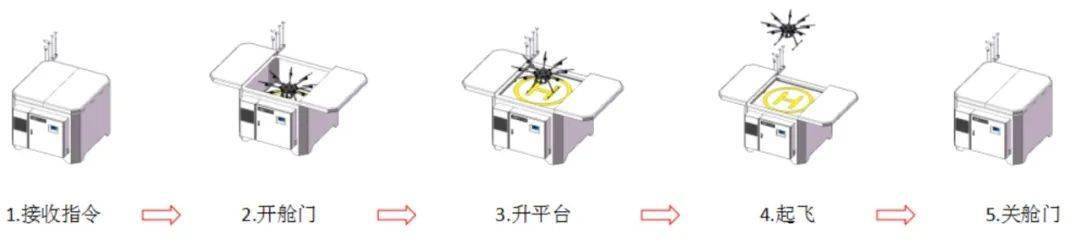
02 系统工作原理 起飞流程
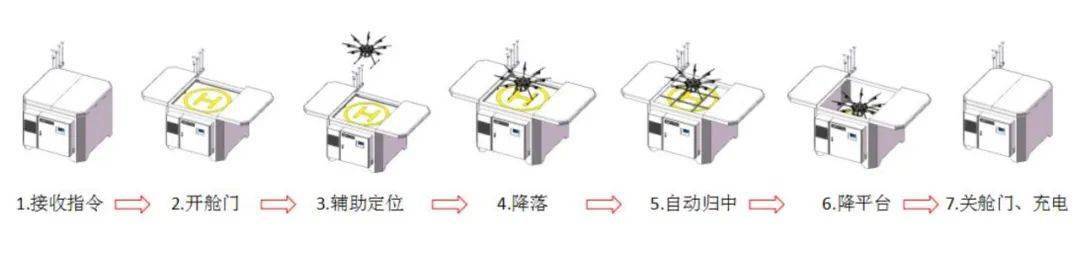
降落流程
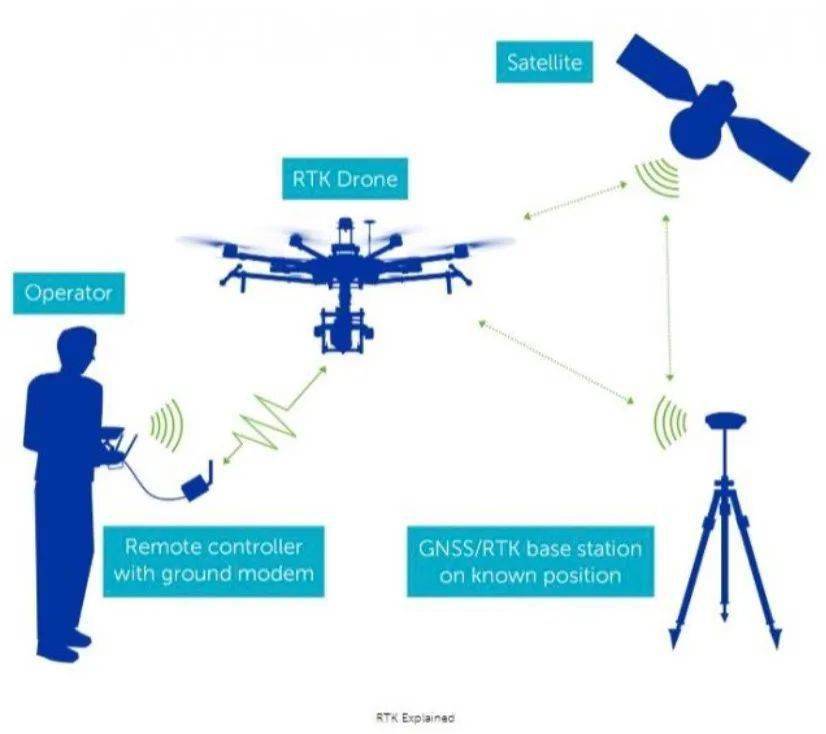
精准降落 无人值守自动停机坪系统中,飞机的起降平台仅有 0.7*0.7m 大小,如何确保飞机每次都能精准的降落在上面,这是成败的关键。目前采用的是RTK 精准定位+视觉引导的方案。 RTK技术和视觉引导技术相互配合,RTK 起到大范围引导飞机的作用,视觉起到小范围精准引导的作用。若环境光线不佳,视觉引导无法发挥作用,则全部由 RTK 引导完成;若环境电磁干扰严重,RTK 精度无法保障,则全部由视觉引导完成; RTK由地面基准站和机载接收模块组成;基准站接收到的卫星信号通过无线通信网实时发给无人机;机载接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和无人机间坐标增量(基线向量)。站间距 30公里以内,平面精度可以控制在 1-2 厘米。
RTK定位
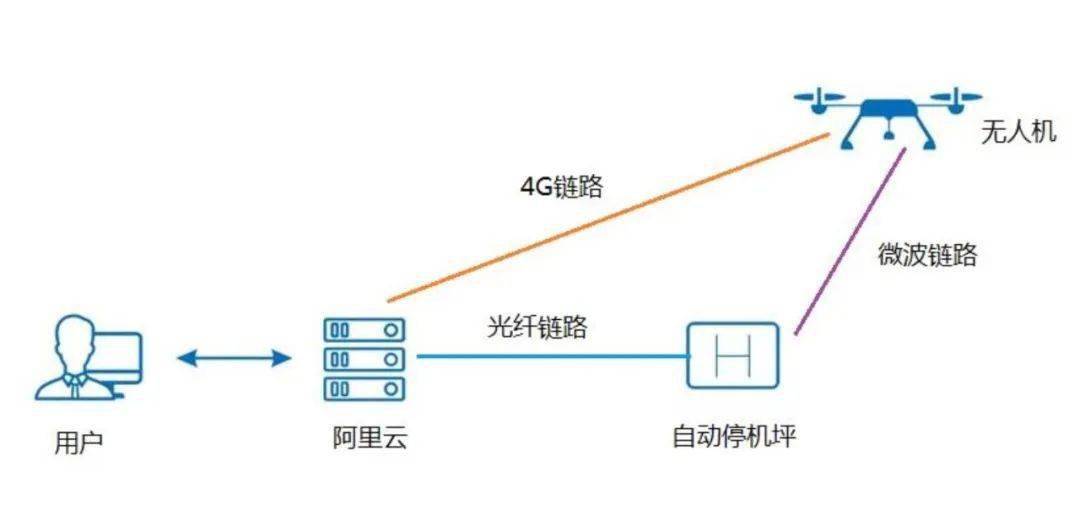
视觉引导 复合通讯 停机坪系统需要依靠通讯来保障运行,后台控制软件运行在阿里云上,停机坪通过光纤接入阿里云,承担高速的宽度通讯,无人机通过 4G 网络接入云后台,因此用户可以远程直接操控无人机;同时无人机与停机坪通过微波通讯,精准降落环节,需要依靠微波链路来引导控制无人机,此外微波链路也充当无人机控制的备用链路,当4G网络无信号时,无人机就自动切换到微波链路,把数据发送至停机坪,停机坪则通过光纤转发至云后台,停机坪充当通讯中继。
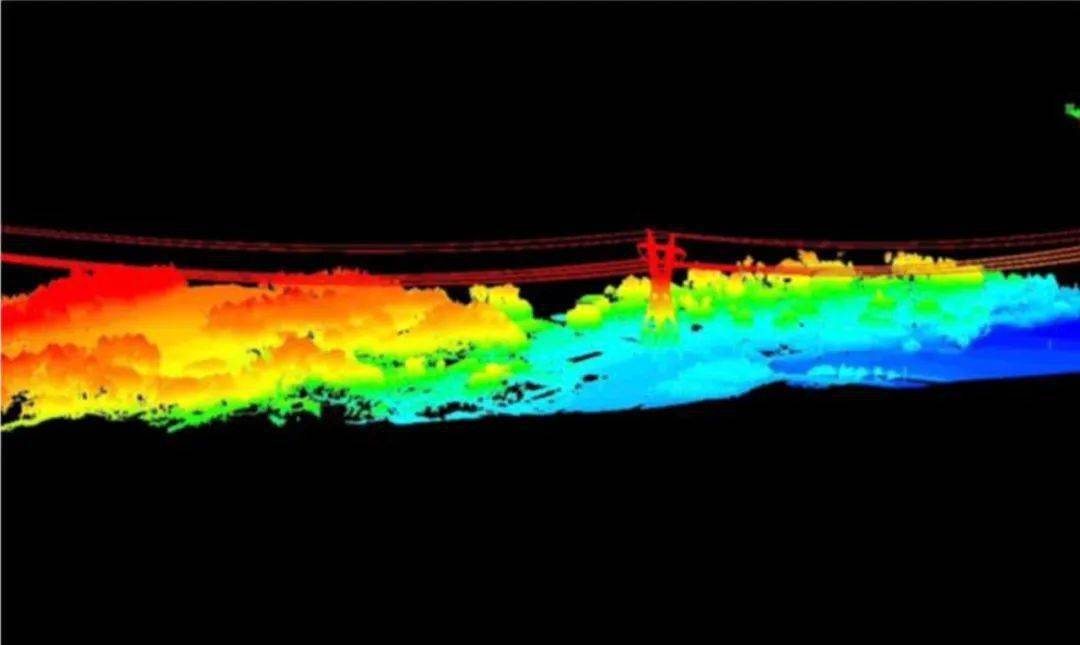
03 应用场景(电力巡检) 1、生成航线 激光雷达在电力行业的应用越来越广泛,通过 360 度,30 万点/秒的密集扫描,再结合高精度的 RTK 技术,可以获取高精度电力线、电力塔及地物环境三维点云数据。
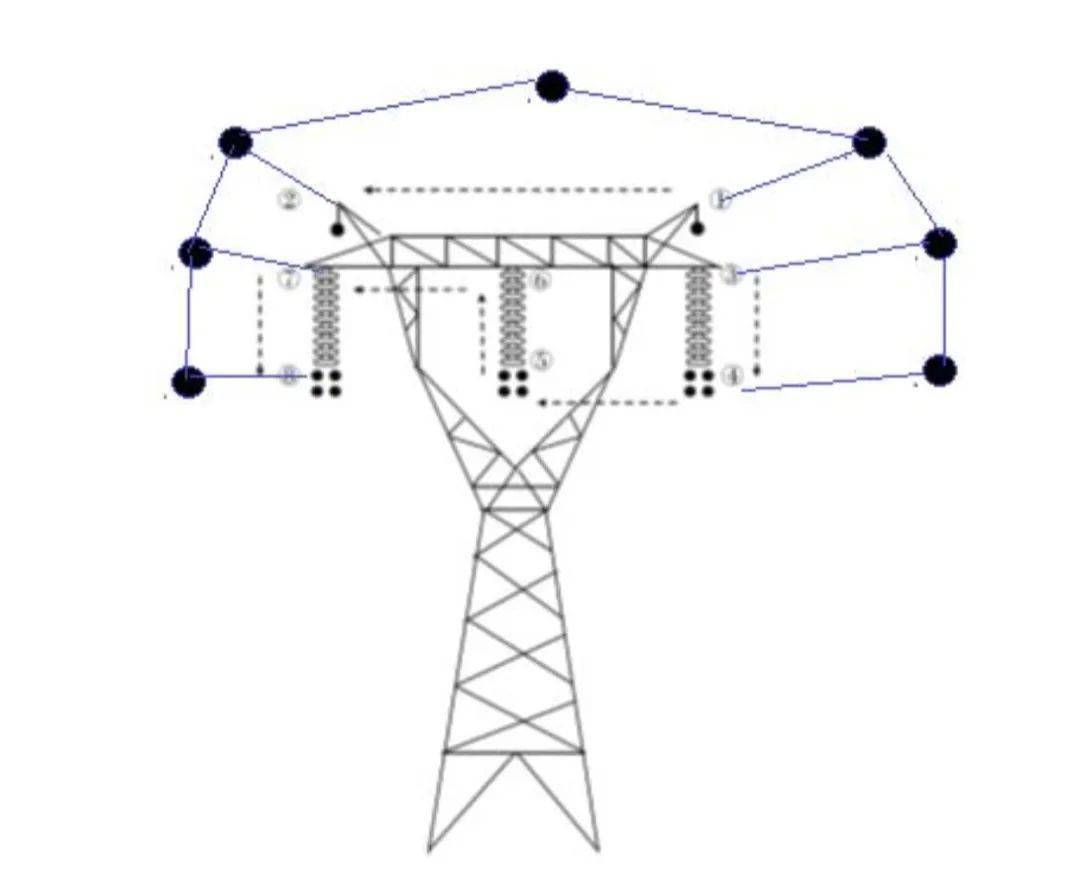
根据点云自动化分类结果,可以区分杆塔上关键部件和杆塔塔型,用塔型和杆塔库中标准杆塔进行比对,可以推算出杆塔各部位的精确空间位置。根据精细化巡检规范要求,计算各挂点空间精确位置和拍摄角度,各挂点之间连线形成航线。
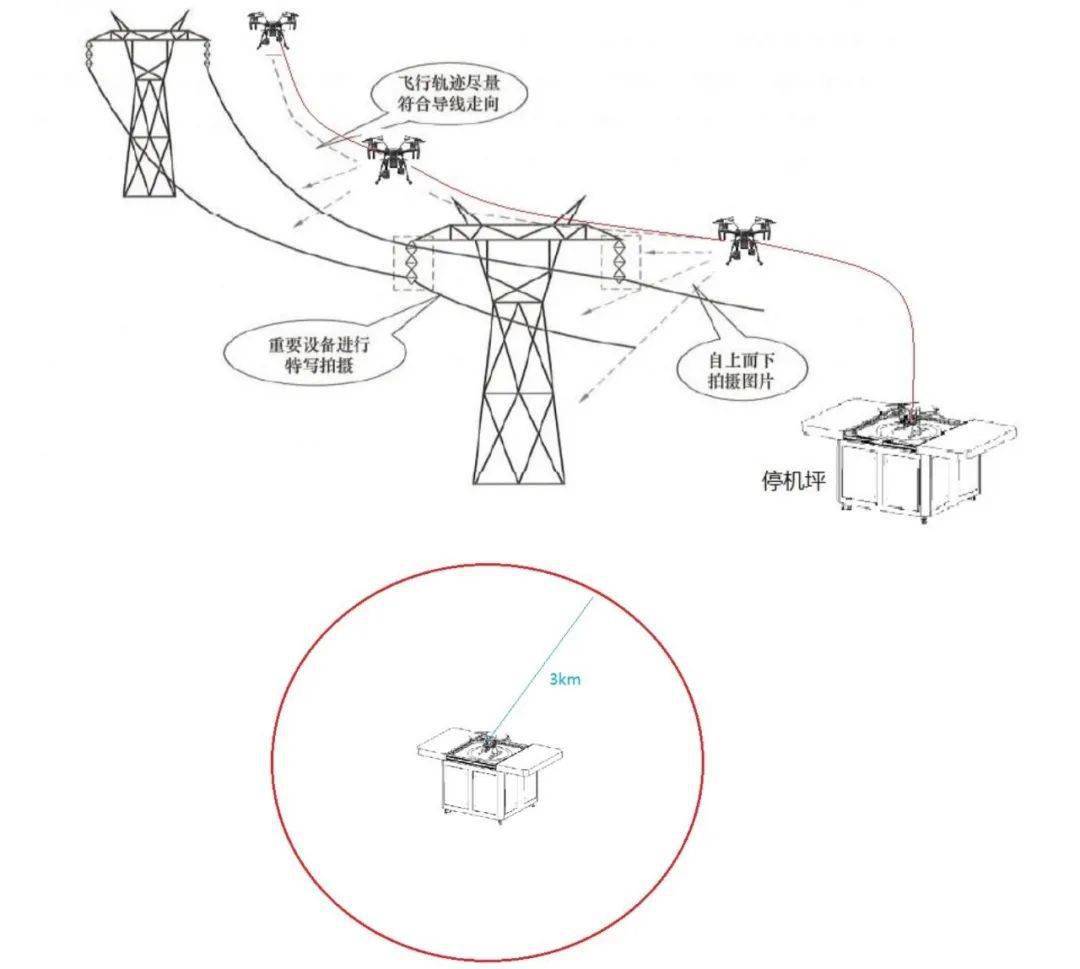
2、远程控制 停机坪的整个收纳和释放飞机的过程,是一套自动化系统,系统本身具备自动协调能力和保护功能。从点云模型之中提取坐标规划航线之后就可以把航点坐标导入后台控制软件;后台控制软件根据坐标寻找就近的停机坪,通知其做好起飞准备;停机坪收到指令后,就启动机械手更换电池, 开启无人机,打开舱门,升起起降台,所有操作自动完成;后台控制软件把任务航线发送到停机坪的无人机上,无人机就自动起飞,开始作业。 作业完成之后,无人机自动返航;飞行到停机坪上空时,视觉自动锁定飞机,引导它精准降落在起降台上;无人机扶正机构把无人机固定在正确的位置上,起降台自动下降;然后机械手启动,把电池取下,自动安装到充电器上去充电。整个过程都是通过网络远程控制,并实时有视频和数据传回。 3、巡检作业和部署 自动停机坪理想的部署位置是在变电站附件,因为有 220V 电源和光纤接入。收到指令后就开始释放无人机作业,一个杆塔巡完飞往另外一个杆塔。 无人机续航时间保守估计25分钟,按平均速度 5m/s 计算飞行距离是7.5km,扣除悬停拍照和精准降落的耗时,一个停机坪是可以覆盖半径 3km的周边。
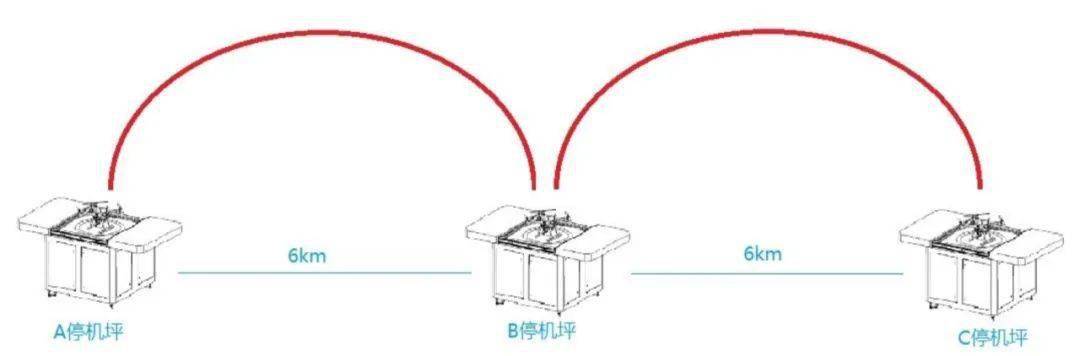
若采用接力的方式(巡线时无人机先从A停机坪起飞进行作业,飞到B停机坪降落更换电池,通过B停机坪的光纤上传拍摄照片,再从B停机坪起飞作业飞到C停机坪更换电池)可以大大拓展无人机的作业距离。
停机坪从接收无人机,更换电池,到无人机再次起飞,平均时间不到 10 分钟。按此计算, 作业效率可以大大提升,减少人力成本,推行标准化,减少人为错误的发生。 目前,该方案已经加入柴火「新基建」项目库,如果你有意愿想进一步了解或引入上述方案,欢迎通过[email protected]跟我们取得联系。 柴火「新基建」栏目背景 「新基建」 正朝我们走来。 柴火作为深度服务于产业创新升级的国际化双创平台,为了凸显在”聚合全球开放社区,对接产业创新升级“上的优势,现特别推出 「新基建」栏目,从5月份开始,不断曝光来自社区内的 「新基建」技术与方案,期望携来自社区的「新基建」技术与方案,服务于「新基建」涉及的多个行业创新升级需求。 如果你是新基建方案开发者,想将您的新基建方案加入到柴火新基建项目库,欢迎扫描以下二维码填写资料,获得更多对外宣传、曝光和商业机会。 如果你是行业端代表,有新基建相关需求和机会,想要借力深圳丰富的科技资源,欢迎通过 [email protected]邮箱跟我们取得联系。 返回搜狐,查看更多 |




【本文地址】